














excellent product, worked out of the box in my mini pc. super fast shipping by thinkrobotics .
It was good package overall, and in good working condition.
product verstiale helper for engnieers
RaspRover Open-source 4WD AI Robot for Raspberry Pi
JetRacer AI Kit Professional Version

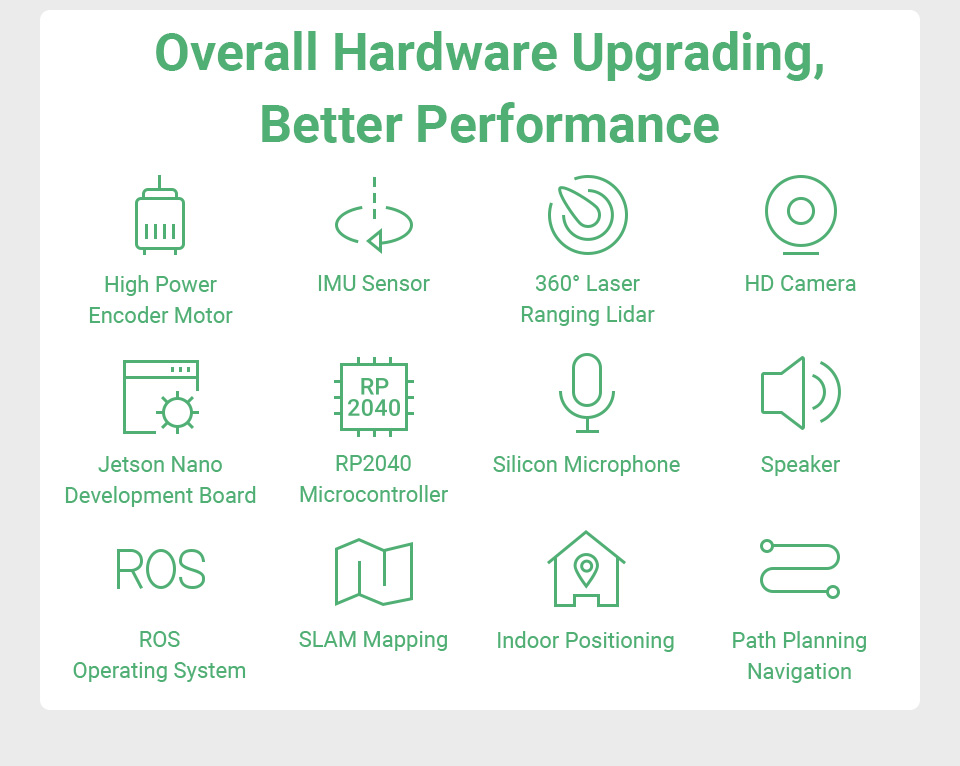
It meets the needs of scientific research algorithm verification in various fields such as Lidar mapping, autonomous navigation, autonomous driving, intelligent speech, target detection, face recognition, etc. It is not only compatible with software of the N-VIDIA JetRacer open-source project, but also is overall upgraded in hardware with better performance.
Note: NVIDIA Jetson Nano has been officially announced as End-of-Life (EOL) starting January 2026. Long-term availability, future software updates, and extended support will be limited.
| JETRACER KIT | JETRACER ROS KIT | |
|---|---|---|
| APPEARANCE |  |
 |
| MICROCONTROLLER | N/A | Raspberry Pi RP2040 Chip |
| MOTOR | 37-520 DC Gear Motor Reduction rate 1:10 Idle speed 740RPM |
37-520 Metal Encoder Motor Reduction Rate 1:30 Idle Speed 333RPM |
| MOTOR ENCODER | N/A | 11 wire AB phase hall speed sensor, supports wheel odometry |
| IMU SENSOR | N/A | MPU9250 |
| LIDAR | N/A | RPLIDAR A1 |
| AUDIO INTERFACE | N/A | One Speaker, Dual Microphones, Support Intelligent speech |
| MAPPING NAVIGATION | Not Support | Support |
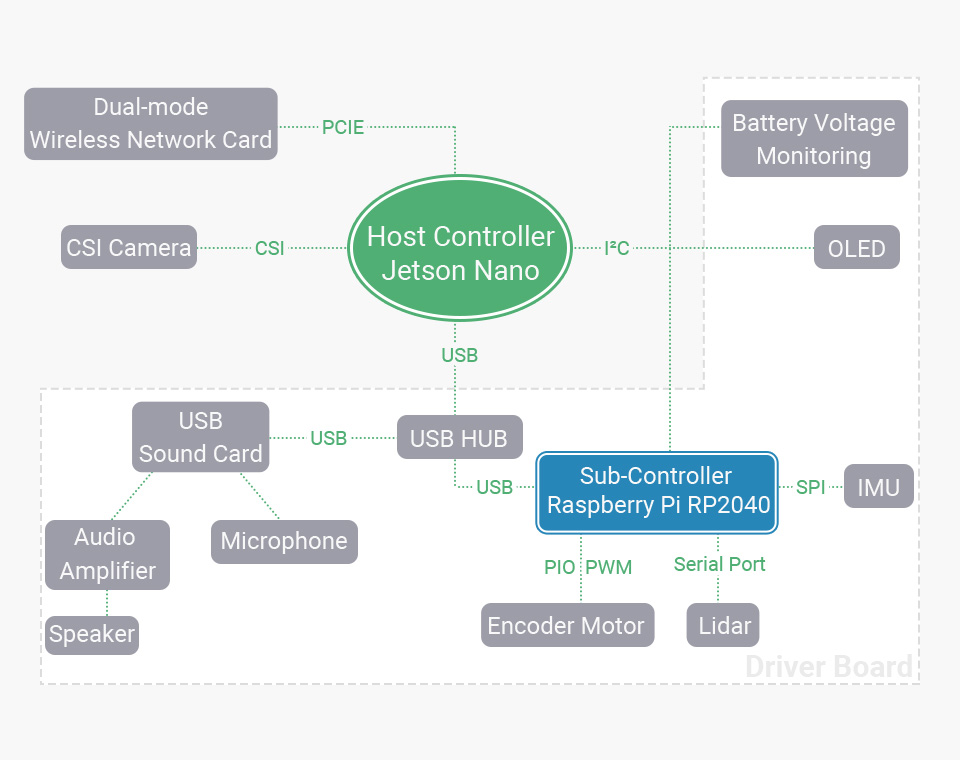
The host controller adopts Jetson Nano Dev Kit, provides two version options: N-VIDIA Jetson Nano Developer Kit (B01) and Waveshare Jetson Nano Dev Kit. Both kits have almost the same performance and appearance, except that the Waveshare Jetson Nano Dev Kit adopts a 16GB eMMC version of the Jetson Nano Module. The Jetson Nano Dev Kit is equipped with 4GB memory and has better performance, responsible for Artificial Intelligence (AI), speech processing, visual processing, mapping and navigation, etc.
The sub-controller uses the Raspberry Pi RP2040 dual-core microcontroller, which has better real-time performance and higher control accuracy, and is responsible for attitude data collection and motion control.

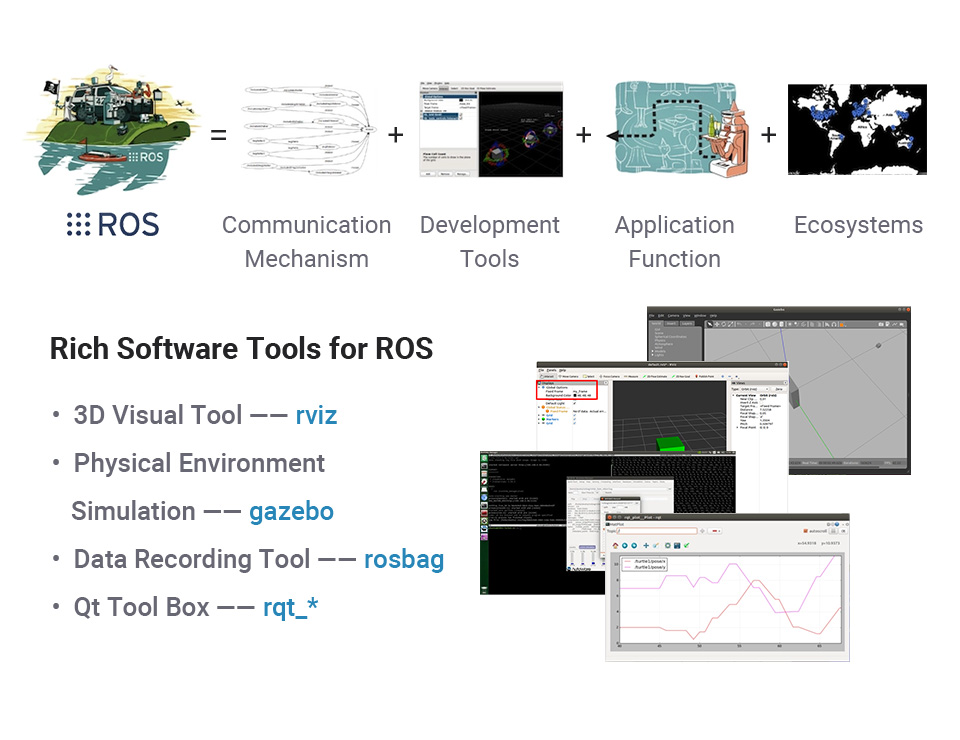
ROS (Robot Operation System) is an open-source operating system that includes a collection of software libraries and tools for robot design. It provides the services expected of an operating system, including hardware abstraction, bottom layer device control, implementation of common functions, message transfering between processes, and package management. ROS simplifies robot design and is the mainstream robot software framework in the world.
Jetracer ROS AI Kit is an autonomous Al racing car powered by N-VIDIA Jetson Nano. By interactive programming via web browser, it allows high frame rate processing due to torch2trt (PyTorch to TensorRT translator) optimizing, so that faster autonomous line following driving can be easily achieved.
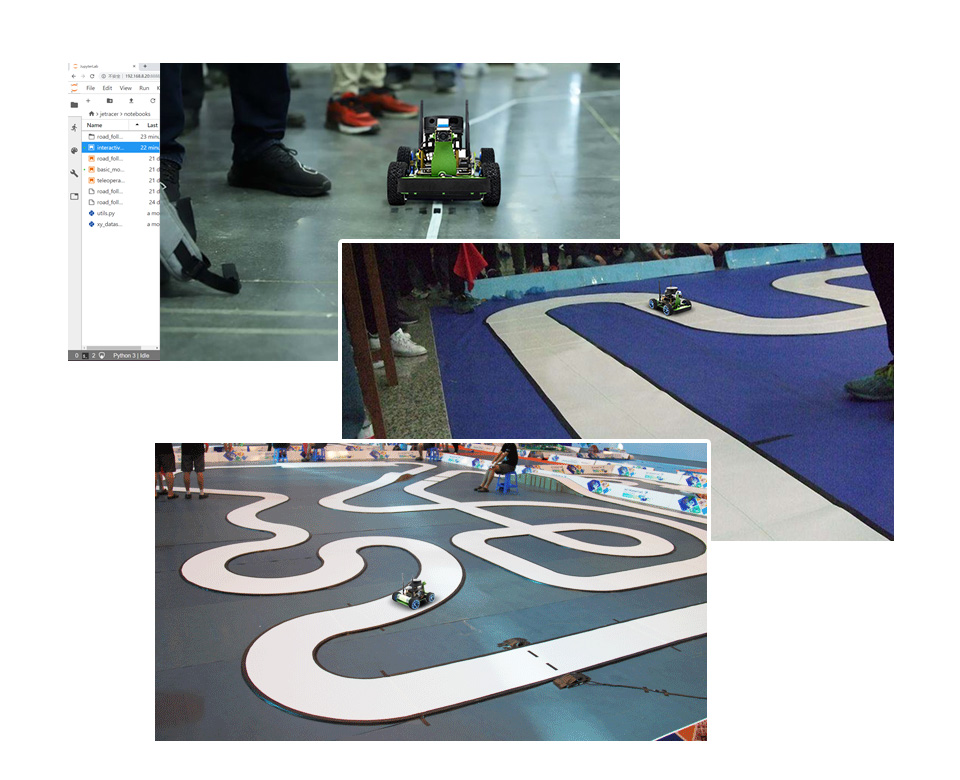
High School AI Education, Race-Specified Intelligent Car
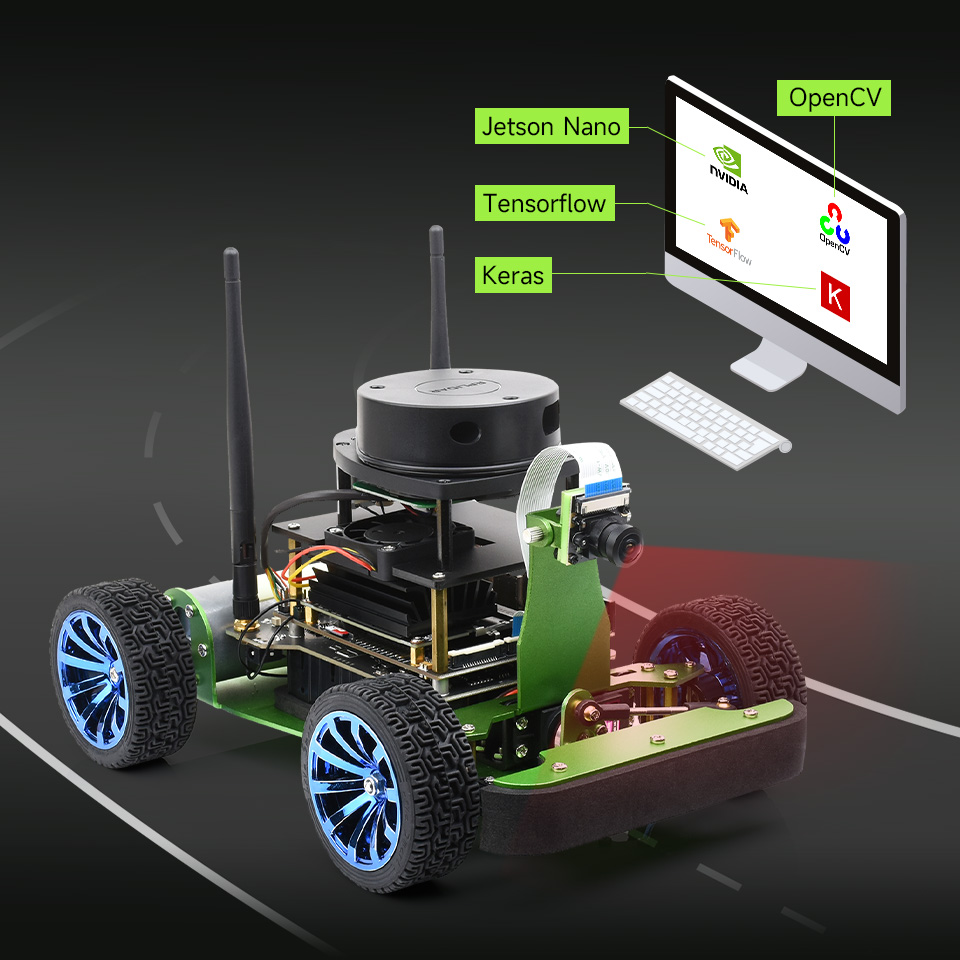
Deep Learning | Self Driving Car
DonKeyCar utilizes deep learning neural network framework Keras/TensorFlow, together with computer vision library OpenCV, to achieve self driving.
Supports Single-Point Navigation, Multi-Point Patrol Navigation, And Mapping While Navigating
Single-point Navigation
After publishing the navigation target position, the robot will automatically plan the path to navigate to the target position.
Multipoint Patrol Navigation
Add navigation dots, the robot will cruise and navigate between the navigation dots.
Mapping while navigating
After publishing the navigation target position, the robot will automatically explore the path to the target point, and publish it while scanning the map.
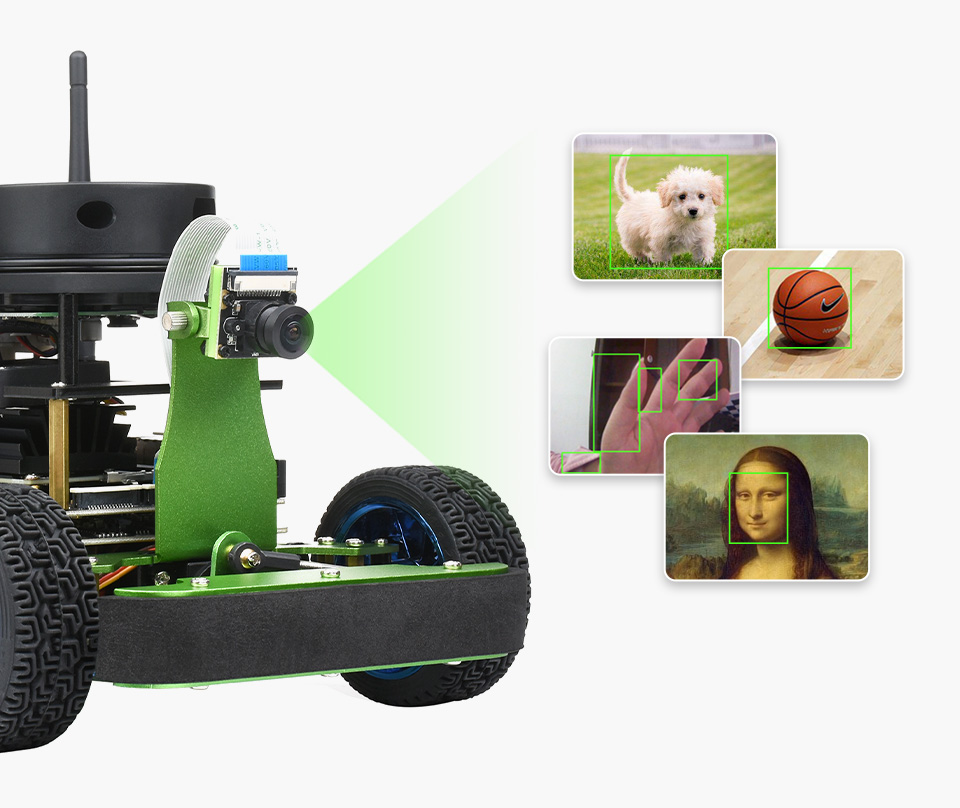
Integrates OpenCV Vision Library, With Extensive Algorithm Demos
AR Vision |
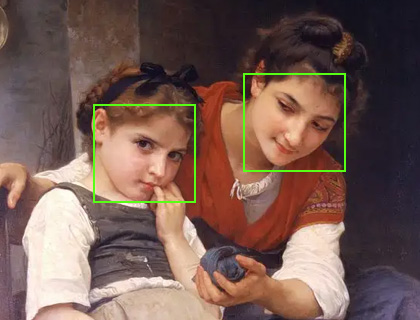
Face Detection |

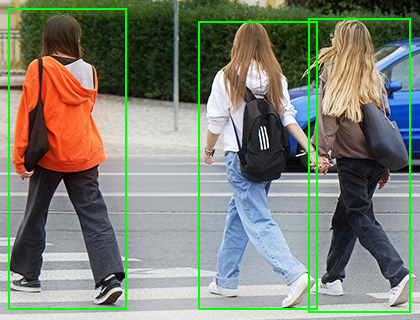
Object Tracking |

Color Recognition |
Motion Detection |

Vision Line Tracking |
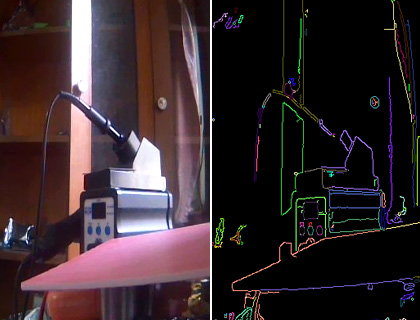
Contour Detection |
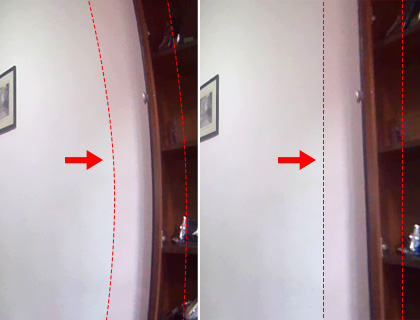
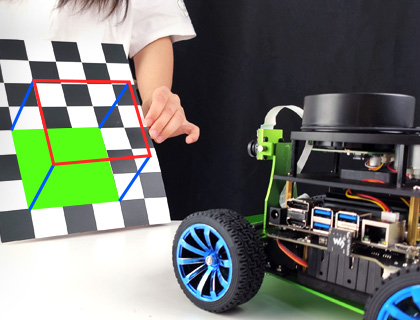
Image Calibration |
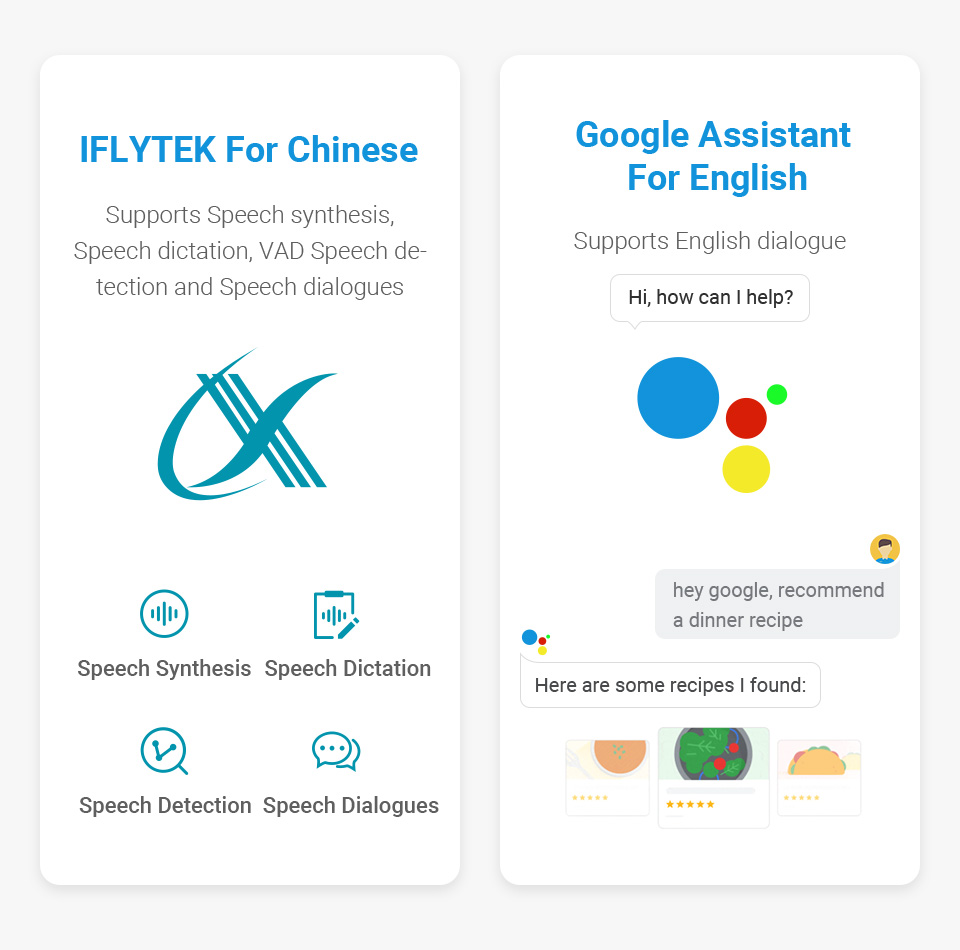
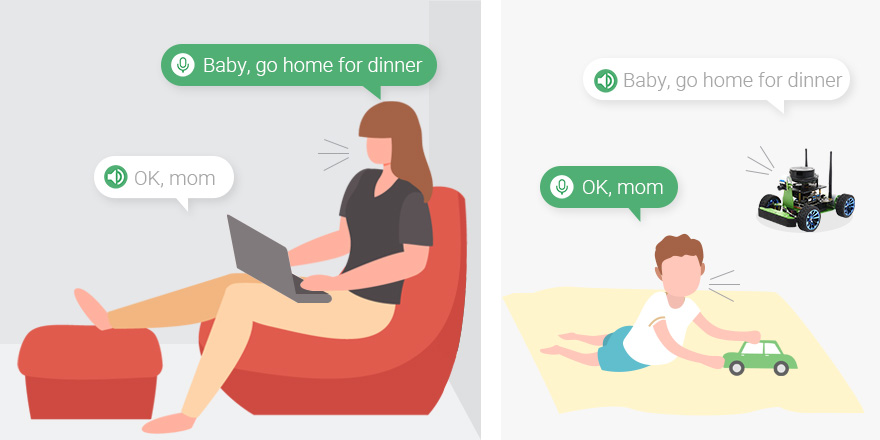
Supports Remote Speech Intercom, Speech Synthesis, Speech Detection, Speech Recognition, Human-Computer Speech Interaction
Real-Time Speech Transmission Between The Computer And The Robot, Enables Two-Way Remote Communication
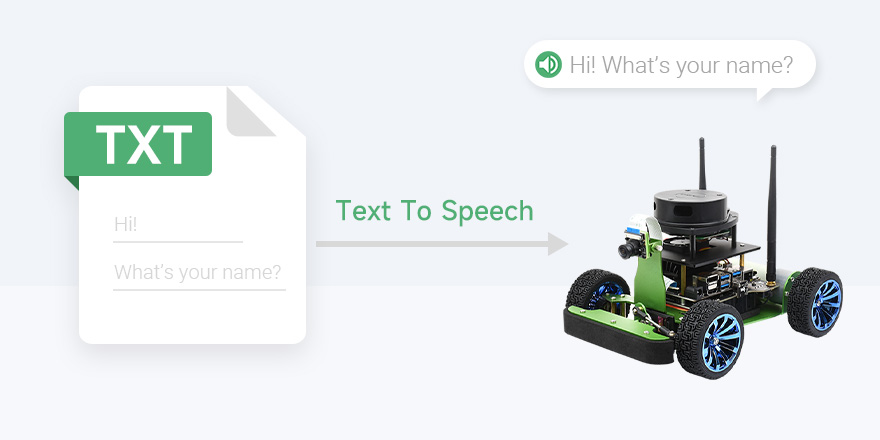
Convert Text To Natural, Smooth Vocals And Play
Send A Text Topic To The Robot, And You Can Hear It Talking
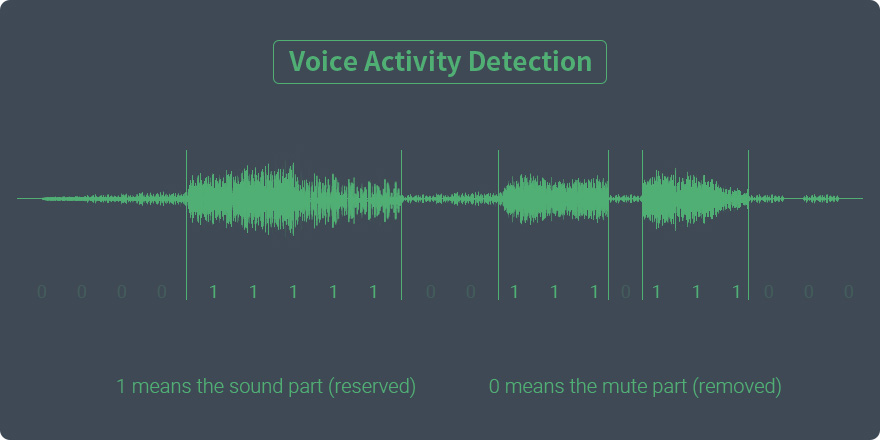
Detects The Sound Of The Audio Stream And Removes The Mute Part
Only Take The Part That The Person Speaks

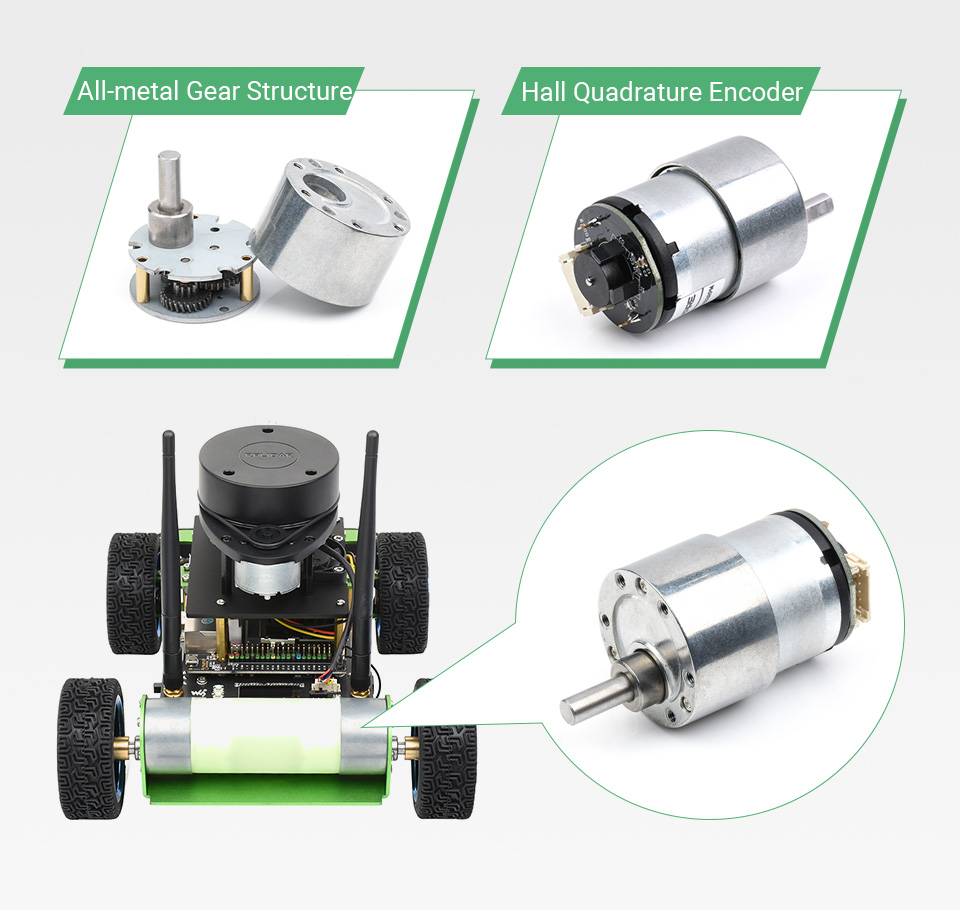
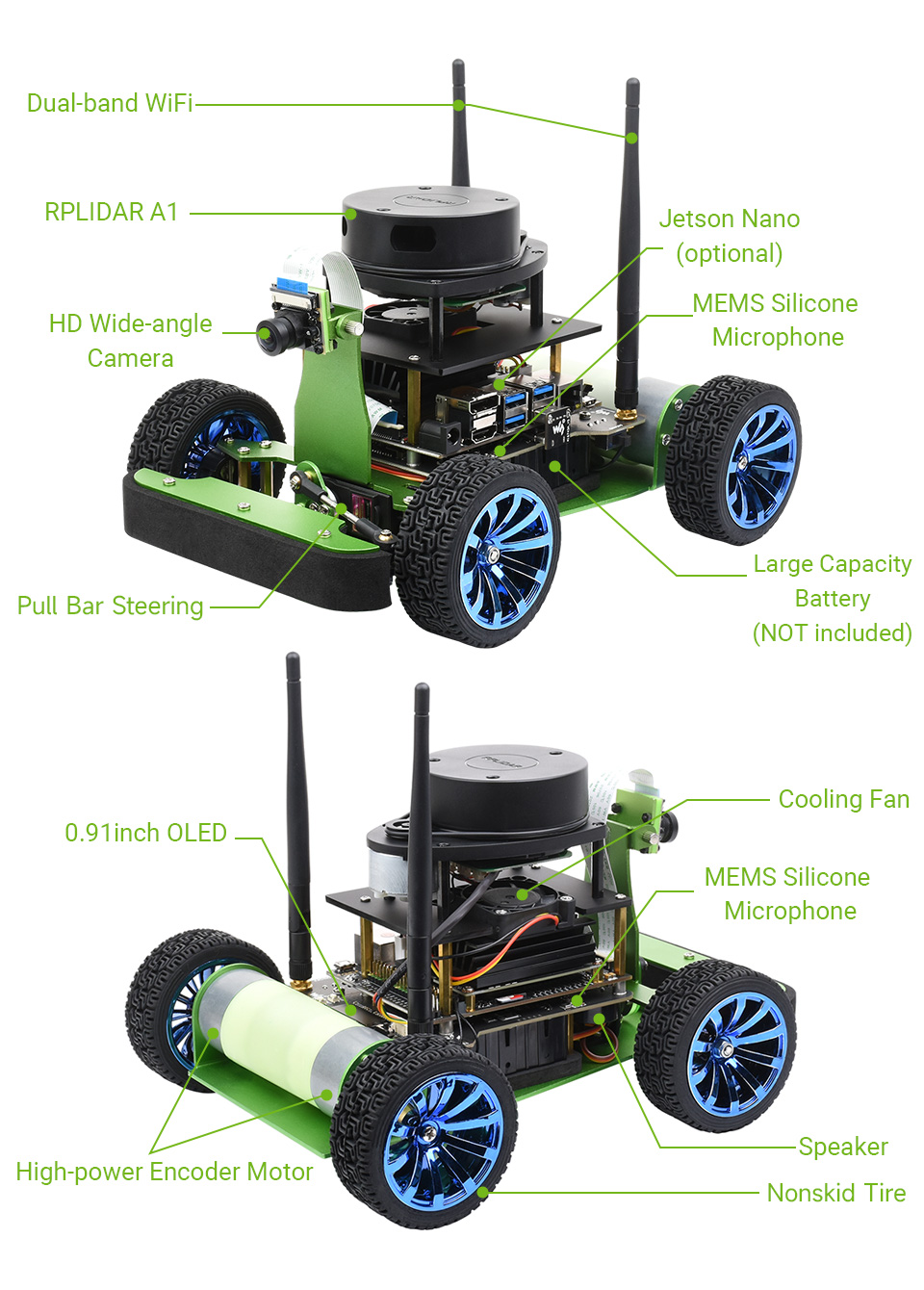
High-Quality Carbon Brushes, All-Metal Gear Structure, High Precision, Low Running Noise, 11-Wire AB-Phase Hall Speed Encoder, Support PID Closed-Loop Speed Control To Calculate Wheel Odometer Information
Built-In High-Precision 9-Axis Motion Attitude Sensor, Using Extended Kalman Filter To Merge Wheel Odometer And IMU Data, Can Produce Higher-Precision Robot Attitude
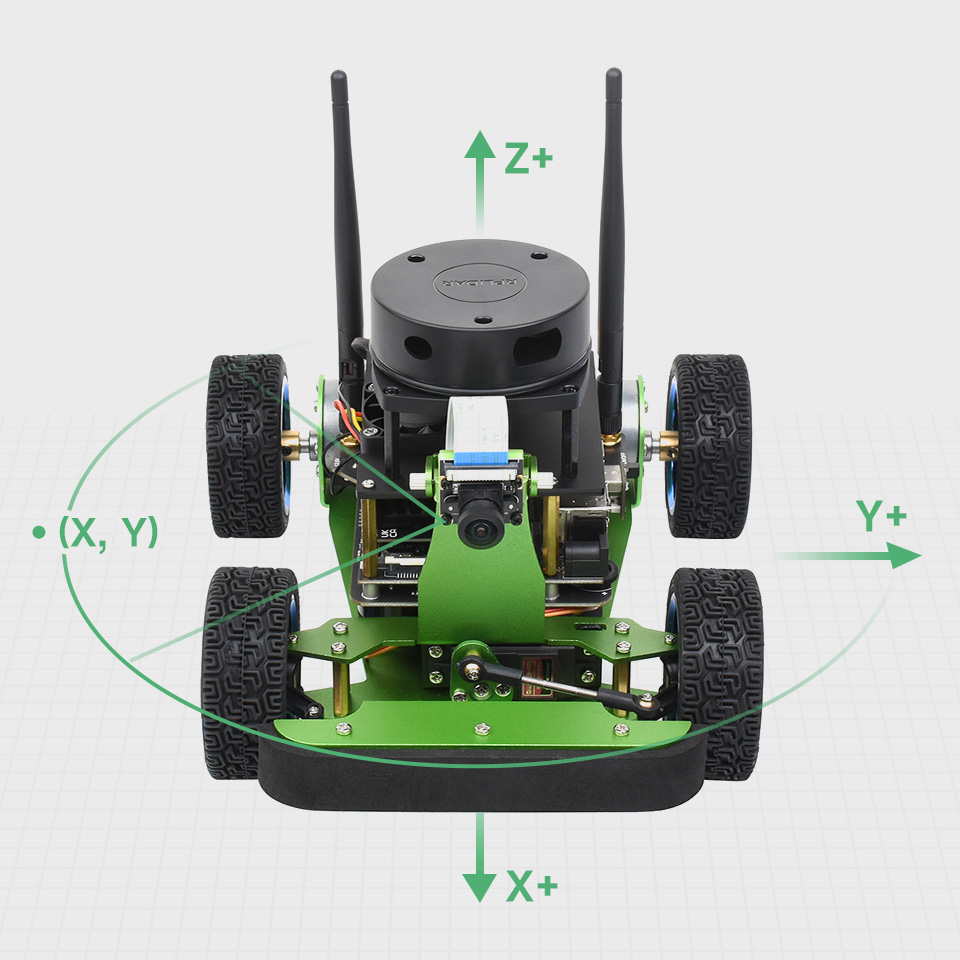
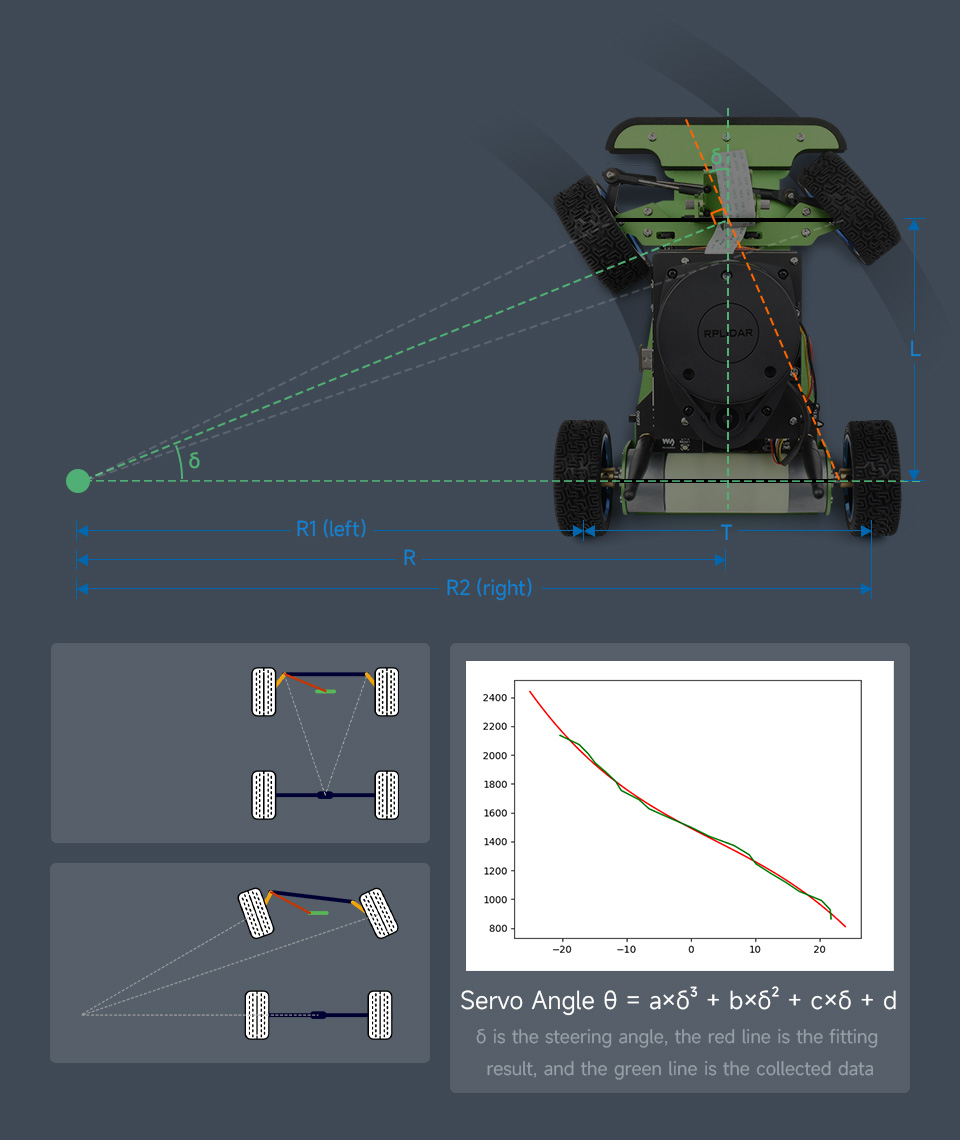
JetRacer ROS AI kit adopts an Ackerman-like steering structure with front wheels servo steering combined with rear wheels differential steering. Provides detailed kinematics model analysis, uses polynomial fitting to output steering angle, makes the steering angle more accurate.
360-Degree Scanning And Ranging Of The Surrounding Environment To Obtain A Contour Map Around The Robot

IMX219 Sensor, 3280 × 2464Resolution
Suitable For OpenCV Vision Development, Object Recognition, Target Tracking, Automatic Driving And Other AI Functions
Onboard Two High-Quality MEMS Silicon Microphones And Speaker For Stereo Recording And Playback. So The Robot Also Has "Ears" And "Mouths" That Can "Listen" And "Talk". Easily Realize Intelligent Speech Interaction

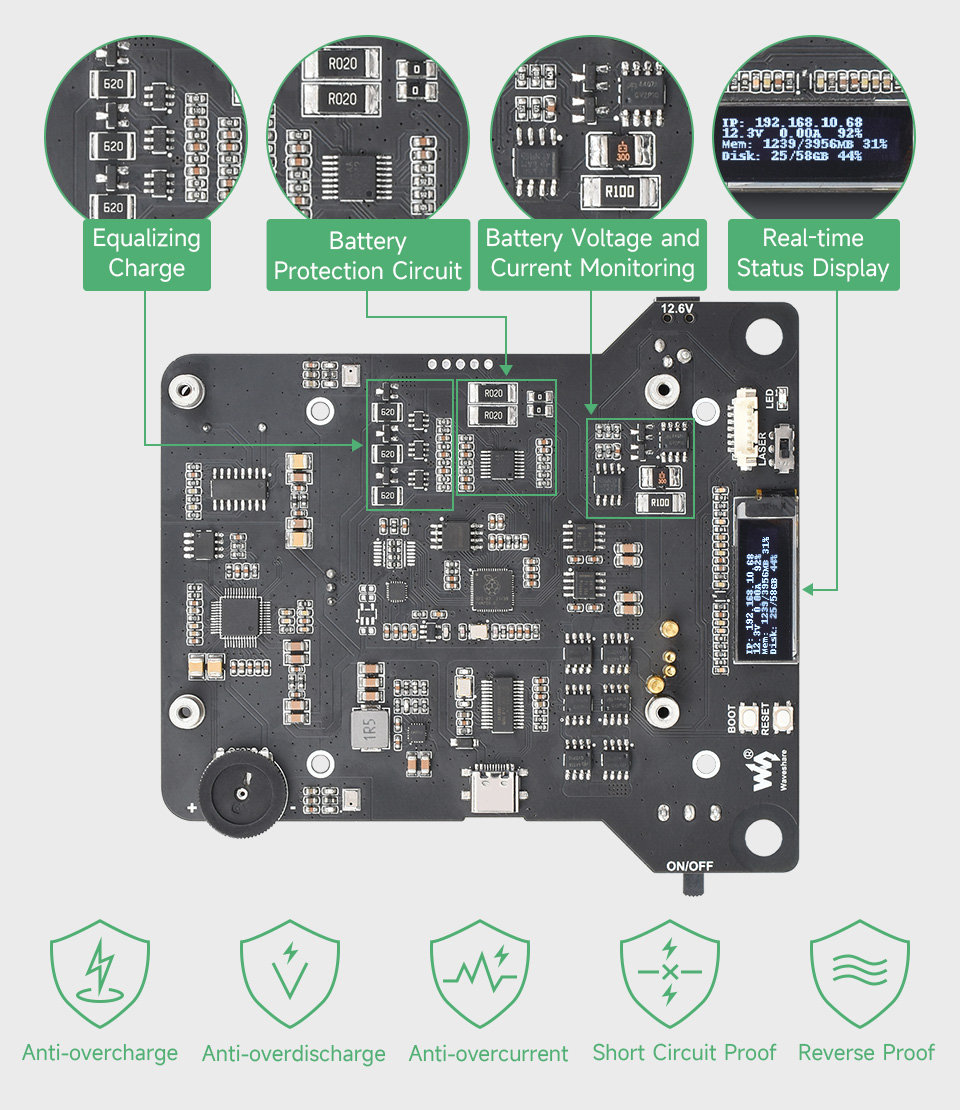
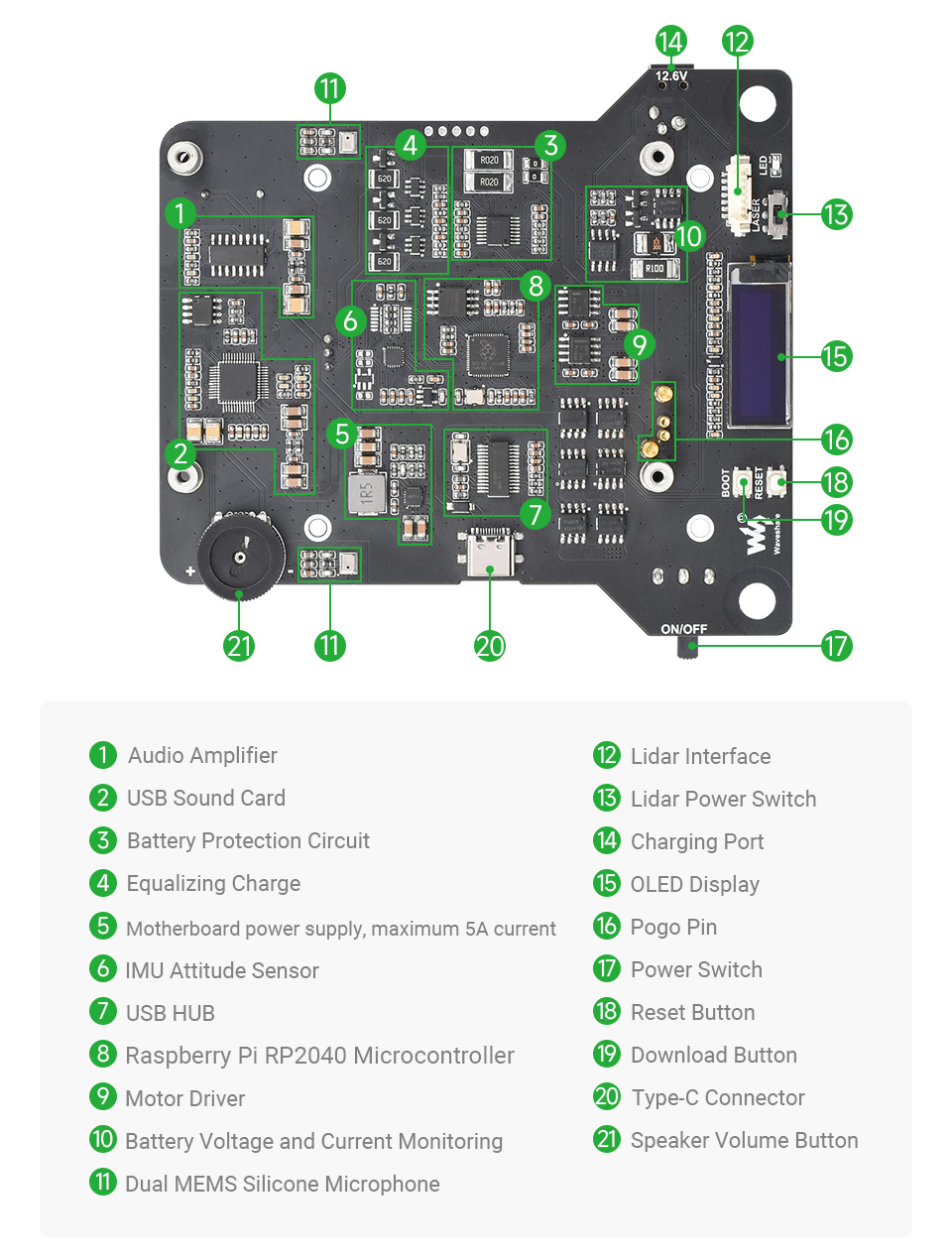
Onboard battery protection circuit for preventing overcharge, over-discharge, overcurrent, short circuit proof, with reverse proof, and equalizing charge. Makes your operation more stable and safer. Built-in battery detection circuit, onboard OLED to real-time display the battery voltage, current, and remaining battery capacity.
Weight: 1.861 kg
Actual Weight: 1.4960 kg
No reviews yet. Be the first to share your experience!
For more discussion Click Here
Discover More In:
Category: View similar items (JetRacer)



Fill out the form below and our team will get back to you with bulk pricing.
JetRacer AI Kit Professional Version
It meets the needs of scientific research algorithm verification in various fields such as Lidar mapping, autonomous navigation, autonomous driving, intelligent speech, target detection, face recognition, etc. It is not only compatible with software of the N-VIDIA JetRacer open-source project, but also is overall upgraded in hardware with better performance.
Note: NVIDIA Jetson Nano has been officially announced as End-of-Life (EOL) starting January 2026. Long-term availability, future software updates, and extended support will be limited.
| JETRACER KIT | JETRACER ROS KIT | |
|---|---|---|
| APPEARANCE | |
|
| MICROCONTROLLER | N/A | Raspberry Pi RP2040 Chip |
| MOTOR | 37-520 DC Gear Motor Reduction rate 1:10 Idle speed 740RPM |
37-520 Metal Encoder Motor Reduction Rate 1:30 Idle Speed 333RPM |
| MOTOR ENCODER | N/A | 11 wire AB phase hall speed sensor, supports wheel odometry |
| IMU SENSOR | N/A | MPU9250 |
| LIDAR | N/A | RPLIDAR A1 |
| AUDIO INTERFACE | N/A | One Speaker, Dual Microphones, Support Intelligent speech |
| MAPPING NAVIGATION | Not Support | Support |
The host controller adopts Jetson Nano Dev Kit, provides two version options: N-VIDIA Jetson Nano Developer Kit (B01) and Waveshare Jetson Nano Dev Kit. Both kits have almost the same performance and appearance, except that the Waveshare Jetson Nano Dev Kit adopts a 16GB eMMC version of the Jetson Nano Module. The Jetson Nano Dev Kit is equipped with 4GB memory and has better performance, responsible for Artificial Intelligence (AI), speech processing, visual processing, mapping and navigation, etc.
The sub-controller uses the Raspberry Pi RP2040 dual-core microcontroller, which has better real-time performance and higher control accuracy, and is responsible for attitude data collection and motion control.
ROS (Robot Operation System) is an open-source operating system that includes a collection of software libraries and tools for robot design. It provides the services expected of an operating system, including hardware abstraction, bottom layer device control, implementation of common functions, message transfering between processes, and package management. ROS simplifies robot design and is the mainstream robot software framework in the world.
Jetracer ROS AI Kit is an autonomous Al racing car powered by N-VIDIA Jetson Nano. By interactive programming via web browser, it allows high frame rate processing due to torch2trt (PyTorch to TensorRT translator) optimizing, so that faster autonomous line following driving can be easily achieved.
High School AI Education, Race-Specified Intelligent Car
Deep Learning | Self Driving Car
DonKeyCar utilizes deep learning neural network framework Keras/TensorFlow, together with computer vision library OpenCV, to achieve self driving.
Supports Single-Point Navigation, Multi-Point Patrol Navigation, And Mapping While Navigating
Single-point Navigation
After publishing the navigation target position, the robot will automatically plan the path to navigate to the target position.
Multipoint Patrol Navigation
Add navigation dots, the robot will cruise and navigate between the navigation dots.
Mapping while navigating
After publishing the navigation target position, the robot will automatically explore the path to the target point, and publish it while scanning the map.
Integrates OpenCV Vision Library, With Extensive Algorithm Demos
|
AR Vision |
Face Detection |
|
Object Tracking |
Color Recognition |
|
Motion Detection |
Vision Line Tracking |
|
Contour Detection |
Image Calibration |
Supports Remote Speech Intercom, Speech Synthesis, Speech Detection, Speech Recognition, Human-Computer Speech Interaction
Real-Time Speech Transmission Between The Computer And The Robot, Enables Two-Way Remote Communication
Convert Text To Natural, Smooth Vocals And Play
Send A Text Topic To The Robot, And You Can Hear It Talking
Detects The Sound Of The Audio Stream And Removes The Mute Part
Only Take The Part That The Person Speaks
High-Quality Carbon Brushes, All-Metal Gear Structure, High Precision, Low Running Noise, 11-Wire AB-Phase Hall Speed Encoder, Support PID Closed-Loop Speed Control To Calculate Wheel Odometer Information
Built-In High-Precision 9-Axis Motion Attitude Sensor, Using Extended Kalman Filter To Merge Wheel Odometer And IMU Data, Can Produce Higher-Precision Robot Attitude
JetRacer ROS AI kit adopts an Ackerman-like steering structure with front wheels servo steering combined with rear wheels differential steering. Provides detailed kinematics model analysis, uses polynomial fitting to output steering angle, makes the steering angle more accurate.
360-Degree Scanning And Ranging Of The Surrounding Environment To Obtain A Contour Map Around The Robot
IMX219 Sensor, 3280 × 2464Resolution
Suitable For OpenCV Vision Development, Object Recognition, Target Tracking, Automatic Driving And Other AI Functions
Onboard Two High-Quality MEMS Silicon Microphones And Speaker For Stereo Recording And Playback. So The Robot Also Has "Ears" And "Mouths" That Can "Listen" And "Talk". Easily Realize Intelligent Speech Interaction
Onboard battery protection circuit for preventing overcharge, over-discharge, overcurrent, short circuit proof, with reverse proof, and equalizing charge. Makes your operation more stable and safer. Built-in battery detection circuit, onboard OLED to real-time display the battery voltage, current, and remaining battery capacity.
Weight: 1.861 kg
Actual Weight: 1.4960 kg
No reviews yet. Be the first to share your experience!
For more discussion Click Here
Discover More In:
Category: View similar items (JetRacer)
Fill out the form below and our team will get back to you with bulk pricing.
Custom Requirements?
Related products

