

Sensor Fusion for Autonomous Vehicles: Enhancing Safety and Perception

Autonomous vehicles (AVs) rely heavily on accurately perceiving their surroundings to navigate safely and efficiently. One key technology enabling this capability is sensor fusion, which combines data from multiple sensors to create a comprehensive understanding of the environment. This blog explores the concept of sensor fusion for autonomous vehicles, its importance, standard techniques, challenges, and future trends shaping the industry.
What is Sensor Fusion?
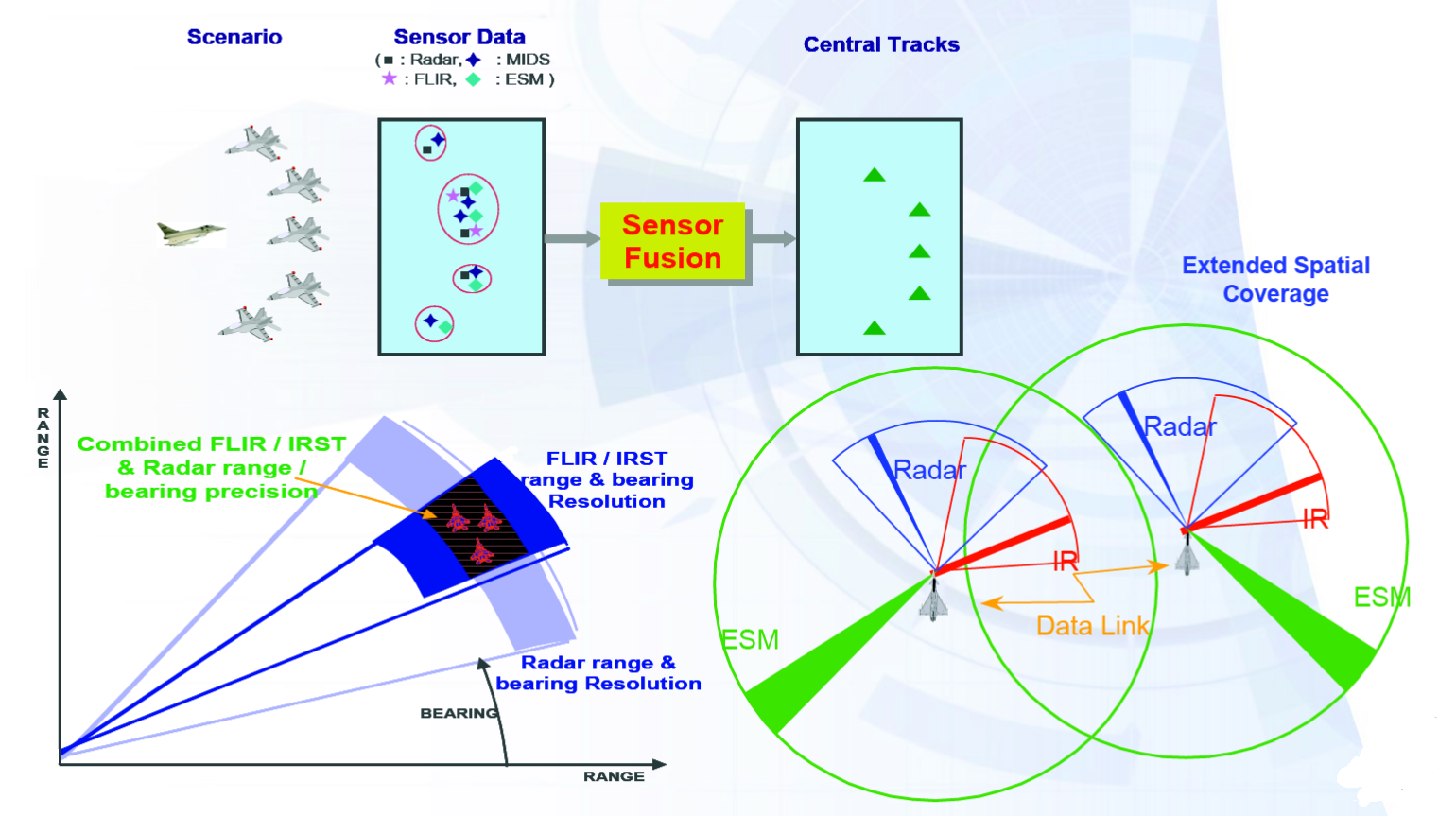
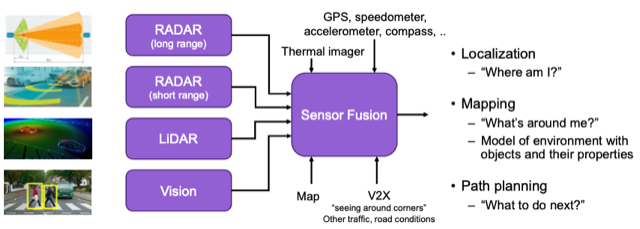
Sensor fusion refers to the integration of data from various sensors to produce more accurate, reliable, and comprehensive information than could be obtained from any single sensor alone. In autonomous vehicles, sensor fusion combines inputs from cameras, LiDAR, radar, ultrasonic sensors, GPS, and inertial measurement units (IMUs) to build a detailed model of the vehicle’s surroundings.
Why is Sensor Fusion Critical for Autonomous Vehicles?
1. Improved Accuracy and Reliability
Each sensor type has strengths and weaknesses. For example:
-
Cameras provide rich color and texture information but struggle in poor lighting or weather.
-
LiDAR offers precise 3D distance measurements but can be expensive and affected by rain or fog.
-
Radar excels at detecting objects in adverse weather and measuring velocity but has lower resolution.
-
Ultrasonic sensors are useful for close-range detection but have limited range.
By fusing data, AVs can compensate for individual sensor limitations, resulting in more robust perception.
2. Redundancy and Safety
Sensor fusion provides redundancy, ensuring that if one sensor fails or is obstructed, others can maintain situational awareness. This redundancy is vital for safety-critical systems like autonomous driving.
3. Enhanced Object Detection and Classification
Combining sensor data improves the detection, classification, and tracking of objects such as pedestrians, vehicles, cyclists, and road signs, enabling better decision-making.
4. Precise Localization and Mapping
Sensor fusion integrates GPS data with IMU and environmental sensors to achieve accurate vehicle localization and build detailed maps for navigation.
Common Sensors Used in Autonomous Vehicles
-
Cameras: Visual data for object recognition, lane detection, and traffic sign reading.
-
LiDAR (Light Detection and Ranging): 3D point clouds for precise distance and shape measurement.
-
Radar: Radio waves to detect object distance and relative speed.
-
Ultrasonic Sensors: Short-range obstacle detection, especially for parking.
-
GPS: Global positioning for coarse localization.
-
IMU (Inertial Measurement Unit): Measures acceleration and rotation for dead reckoning.
Sensor Fusion Techniques
1. Low-Level (Data-Level) Fusion
Raw data from sensors are combined before any processing. For example, merging LiDAR point clouds with camera images to create a colored 3D map. This approach requires high computational power and precise sensor calibration.
2. Mid-Level (Feature-Level) Fusion
Features extracted from sensor data (edges, shapes, motion vectors) are fused. This reduces data volume and computational load while preserving important information.
3. High-Level (Decision-Level) Fusion
Individual sensors independently detect and classify objects, and their outputs are combined to make final decisions. This method is simpler but may lose some detail.
Algorithms and Models for Sensor Fusion
-
Kalman Filter: Widely used for combining noisy sensor data to estimate vehicle position and velocity.
-
Extended Kalman Filter (EKF): Handles nonlinear systems common in vehicle dynamics.
-
Particle Filter: Uses multiple hypotheses to track complex, nonlinear systems.
-
Bayesian Networks: Probabilistic models for decision-making under uncertainty.
-
Deep Learning: Neural networks fuse sensor data for object detection and semantic segmentation.
Challenges in Sensor Fusion for Autonomous Vehicles
1. Sensor Calibration and Synchronization
Accurate fusion requires precise spatial and temporal alignment of sensor data. Calibration errors can lead to incorrect perception.
2. Data Volume and Processing Speed
High-resolution sensors generate massive data streams. Real-time processing demands efficient algorithms and powerful hardware.
3. Environmental Conditions
Sensors behave differently under rain, fog, snow, or glare. Fusion algorithms must adapt to varying conditions.
4. Sensor Failures and Noise
Robust fusion must handle sensor dropouts, noise, and false positives gracefully.
5. Cost and Complexity
Adding multiple sensors increases vehicle cost and system complexity, impacting scalability.
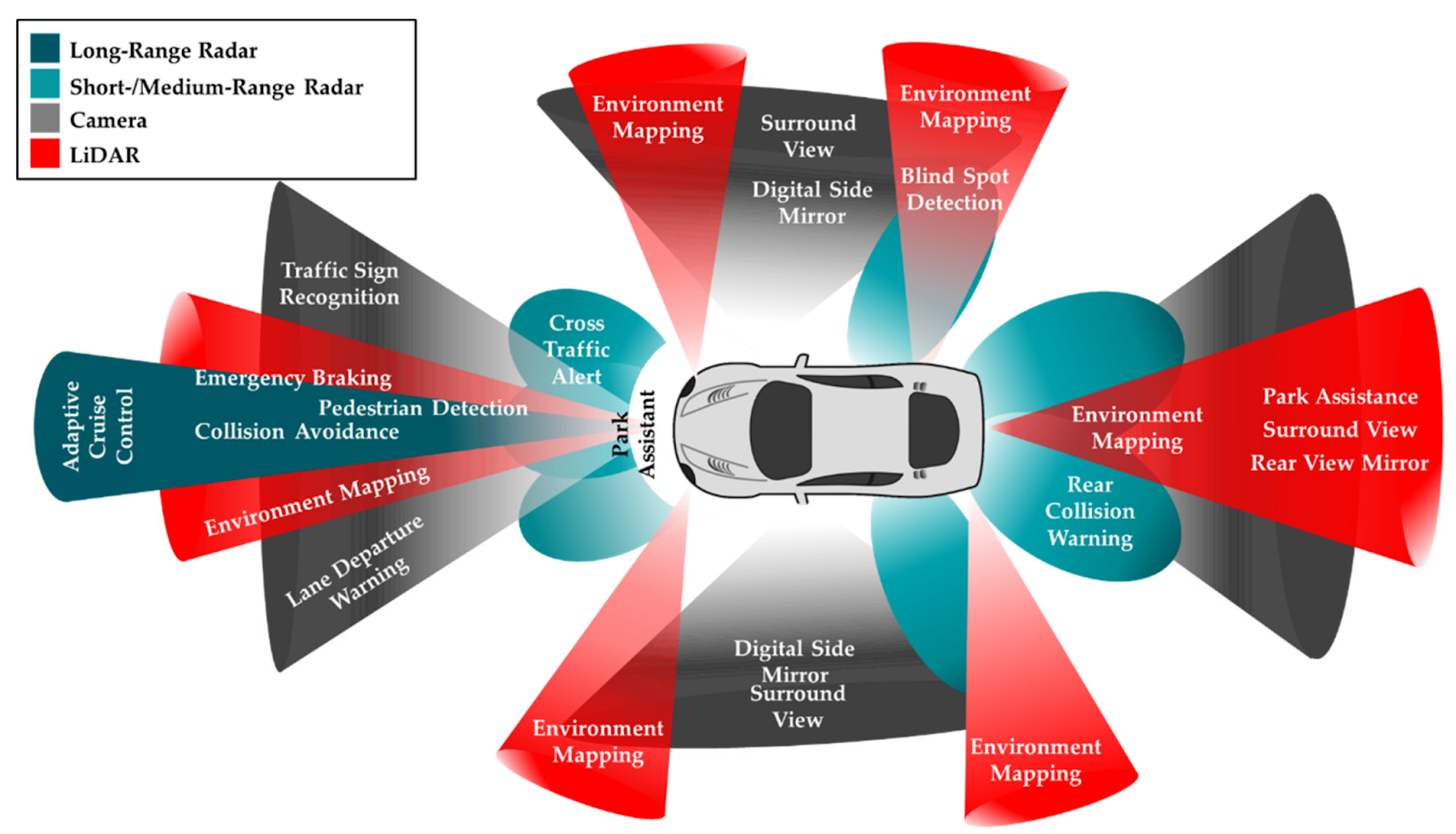
Real-World Applications of Sensor Fusion in Autonomous Vehicles
-
Adaptive Cruise Control: Combines radar and camera data to maintain safe distances.
-
Lane Keeping Assist: Uses cameras and LiDAR to detect lane markings and obstacles.
-
Pedestrian Detection: Fuses camera and radar inputs for reliable identification.
-
Obstacle Avoidance: Integrates ultrasonic, LiDAR, and radar data for close-range navigation.
-
High-Definition Mapping: Combines GPS, LiDAR, and IMU data for precise localization
Future Trends in Sensor Fusion for Autonomous Vehicles
1. AI-Driven Fusion
Deep learning models will increasingly handle sensor fusion tasks, improving accuracy and adaptability.
2. Edge Computing
Processing sensor data locally on the vehicle reduces latency and dependence on cloud connectivity.
3. Sensor Miniaturization and Cost Reduction
Advances in sensor technology will make fusion systems more affordable and compact.
4. Multi-Vehicle Data Sharing
Vehicles sharing sensor data via V2V (vehicle-to-vehicle) communication will enhance collective perception.
5. Standardization and Interoperability
Industry-wide standards will simplify integration and improve safety.
Conclusion
Sensor fusion is a foundational technology enabling autonomous vehicles to perceive their environment accurately and safely. By intelligently combining data from diverse sensors, AVs overcome individual sensor limitations, achieve redundancy, and make informed decisions in complex driving scenarios. Despite challenges like calibration, data processing, and environmental variability, ongoing advances in algorithms, AI, and hardware continue to push the boundaries of what sensor fusion can achieve.
As autonomous vehicle technology matures, sensor fusion will remain at the heart of innovation, driving safer roads and smarter transportation systems worldwide.
Frequently Asked Questions
1. What is the main benefit of sensor fusion in autonomous vehicles?
It improves perception accuracy and reliability by combining data from multiple sensors, compensating for individual sensor weaknesses.
2. Which sensors are most commonly fused in autonomous vehicles?
Cameras, LiDAR, radar, ultrasonic sensors, GPS, and IMUs are commonly fused to provide comprehensive environmental awareness.
3. How does sensor fusion handle sensor failures?
Fusion algorithms use redundancy to maintain situational awareness even if one or more sensors fail or provide noisy data.
4. What role does AI play in sensor fusion?
AI, especially deep learning, enhances sensor fusion by learning complex patterns and improving object detection and classification.
5. Is sensor fusion only used in autonomous cars?
No, sensor fusion is also used in drones, robotics, industrial automation, and augmented reality systems.
