

Using CAN Bus in Robotics Projects: A Comprehensive Guide

Reliable communication between components is crucial in the evolving landscape of robotics. The Controller Area Network (CAN) bus has emerged as a powerful solution for robotics engineers seeking robust data exchange systems. This article explores how using the CAN bus in robotics projects can enhance performance, reliability, and scalability.
What is CAN Bus?
CAN bus is a vehicle bus standard designed to allow microcontrollers and devices to communicate without a host computer. Developed by Robert Bosch GmbH in the 1980s for automotive applications, CAN bus has found its way into robotics due to its reliability and noise resistance.
When using CAN bus in robotics projects, engineers benefit from:
-
Robust error detection and handling
-
Multi-master communication architecture
-
Message prioritization
-
High-speed data transfer (up to 1 Mbps)
-
Excellent noise immunity
Why CAN Bus is Ideal for Robotics
Robotics systems often operate in challenging environments with multiple actuators, sensors, and controllers. Using CAN bus in robotics projects addresses several key challenges:
Distributed Control Systems
Modern robots utilize distributed control architectures where processing is spread across multiple nodes. CAN bus enables efficient communication between these nodes, allowing for modular design and easier maintenance.
Real-time Performance
Robotics applications demand deterministic communication with predictable latency. The message prioritization feature of CAN bus ensures critical messages are transmitted first, making it ideal for real-time control systems.
Noise Resistance
Industrial environments often contain electromagnetic interference. When using CAN bus in robotics projects, the differential signaling provides excellent noise immunity, ensuring reliable communication even in harsh conditions.
Reduced Wiring Complexity
Traditional point-to-point connections become unwieldy as robot complexity increases. CAN bus significantly reduces wiring complexity by allowing multiple devices to communicate over a single twisted pair.
Implementing CAN Bus in Robotics Projects
Hardware Requirements
When using CAN bus in robotics projects, you'll need:
-
CAN controller (often integrated into microcontrollers)
-
CAN transceiver (converts controller signals to differential signals)
-
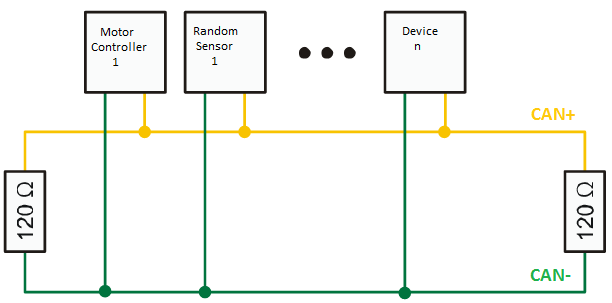
Termination resistors (120Ω at each end of the bus)
-
Twisted-pair cabling
Popular microcontrollers with built-in CAN controllers include STM32 series, NXP's LPC series, and Arduino with CAN shields.
Software Implementation
The software stack for using CAN bus in robotics projects typically includes:
-
Low-level drivers for CAN controller configuration
-
Message filtering and handling
-
Higher-level protocols (CANopen, DeviceNet, or custom protocols)
-
Application-specific logic
Many robotics frameworks like ROS (Robot Operating System) offer CAN bus support through packages such as ros_canopen.
Message Structure
A standard CAN message includes:
-
Identifier (11-bit standard or 29-bit extended)
-
Data length code (DLC)
-
Data field (up to 8 bytes)
-
CRC field for error detection
When using CAN bus in robotics projects, engineers must design an appropriate message structure and ID allocation scheme based on priority and functionality.
Real-World Applications
Mobile Robots
In autonomous mobile robots, CAN bus connects motor controllers, sensors, and the main processing unit. The deterministic nature of CAN bus ensures precise control of wheel motors and timely processing of sensor data.
Robotic Arms
Industrial robotic arms benefit from using CAN bus in robotics projects due to the need for synchronized joint control. CAN bus enables coordinated movement across multiple servo motors with minimal latency.
Humanoid Robots
Complex humanoid robots may contain dozens of actuators and sensors. CAN bus provides a scalable communication backbone, allowing seamless integration of additional components as the robot evolves.
Agricultural Robots
In precision agriculture, robots operate in harsh outdoor environments. Using CAN bus in robotics projects for agricultural applications ensures reliable communication despite dust, moisture, and temperature variations.
Advanced Techniques
Higher-Layer Protocols
While CAN bus defines the physical and data link layers, higher-layer protocols add functionality:
-
CANopen: Provides standardized communication profiles for devices
-
J1939: Common in heavy machinery and agricultural equipment
-
DeviceNet: Used in industrial automation
These protocols simplify using CAN bus in robotics projects by providing standardized device profiles and communication services.
Redundant Bus Architecture
Critical robotics applications may implement redundant CAN buses to ensure fault tolerance. If one bus fails, communication continues on the backup bus without interruption.
Bridging with Other Networks
Modern robotics systems often combine multiple communication technologies. Gateways can bridge CAN bus with Ethernet, Wi-Fi, or other protocols, creating hybrid networks that leverage the strengths of each technology.
Challenges and Solutions
Bus Loading
As the number of nodes increases, bus loading can become a concern. When using CAN bus in robotics projects with many nodes, consider:
-
Optimizing message frequencies
-
Using multiple CAN segments
-
Implementing message filtering
Synchronization
Some robotics applications require precise synchronization across distributed nodes. Time synchronization protocols can be implemented over the CAN bus to achieve microsecond-level precision.
Security Concerns
Traditional CAN bus lacks built-in security features. For sensitive applications, consider implementing:
-
Message authentication
-
Encryption for sensitive data
-
Intrusion detection systems
Future Trends
CAN FD (Flexible Data-Rate)
CAN FD extends the original CAN protocol with:
-
Increased data payload (up to 64 bytes)
-
Higher bit rates (up to 8 Mbps)
This makes using CAN bus in robotics projects even more attractive for data-intensive applications.
Integration with TSN (Time-Sensitive Networking)
The combination of CAN bus with Ethernet TSN is emerging as a powerful solution for next-generation robotics, offering deterministic communication with higher bandwidth.
AI-Enhanced Communication
Machine learning algorithms are being applied to optimize CAN bus communication, predicting traffic patterns and adaptively adjusting parameters for optimal performance.
Conclusion
Using CAN bus in robotics projects offers a robust, reliable, and scalable communication solution that has stood the test of time. From simple hobby robots to complex industrial systems, CAN bus provides the deterministic performance and noise immunity essential for successful robotics applications.
As robotics continues to evolve, CAN bus remains relevant through extensions like CAN FD and integration with newer technologies. Engineers in India and worldwide continue to leverage this proven technology as a foundation for innovative robotics solutions.
Whether you're building your first robot or designing a complex industrial automation system, understanding and implementing CAN bus will significantly enhance your project's reliability and performance. The growing adoption of robotics in Indian manufacturing, agriculture, and healthcare sectors makes using CAN bus in robotics projects an increasingly valuable skill for engineers and developers nationwide.
Frequently Asked Questions
1. What's the cost of implementing CAN bus in a robotics project?
Basic CAN components cost ₹200-3,000 in India, with long-term savings from reduced wiring and maintenance when using CAN bus in robotics projects.
2. How does CAN bus perform with battery-powered robots?
CAN bus is power-efficient, consuming 15-20mA during operation and microamps in standby, making it suitable for battery-powered robotics applications.
3. Can CAN bus connect to cloud systems?
Yes, gateway devices can translate CAN messages to Internet protocols, enabling cloud connectivity when using CAN bus in robotics projects.
4. What's the maximum distance for CAN bus in robotics?
At 1 Mbps, CAN bus works up to 40 meters. Lower speeds (125 kbps) allow up to 500m, and repeaters or fiber bridges can extend this further.
5. How do I troubleshoot CAN bus issues?
When troubleshooting issues in robotics applications, use CAN analyzers, check termination resistors (they should be ~60Ω), verify grounding, inspect cables, and test at lower speeds.