







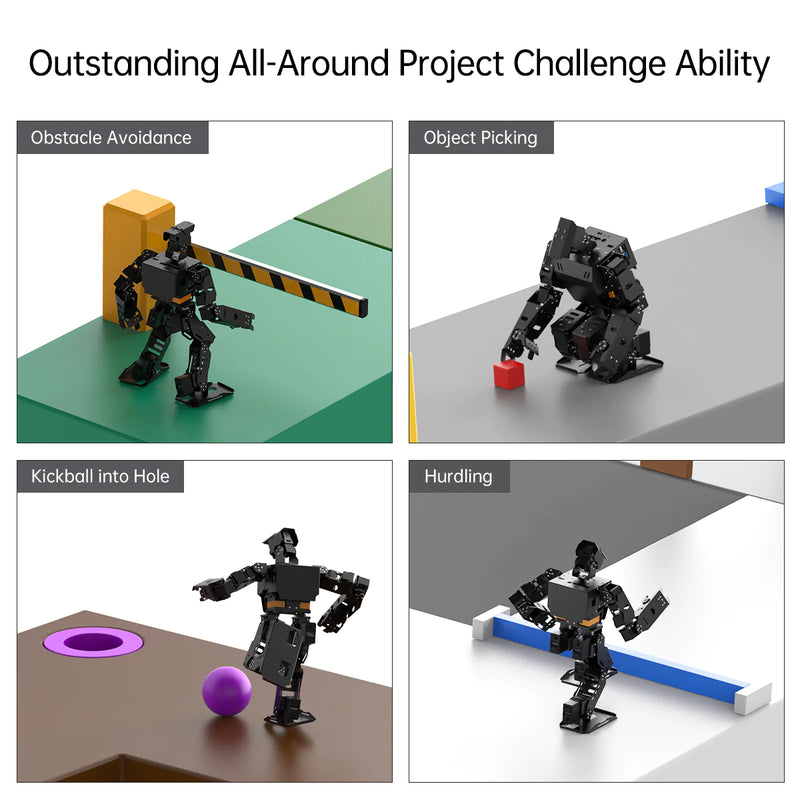


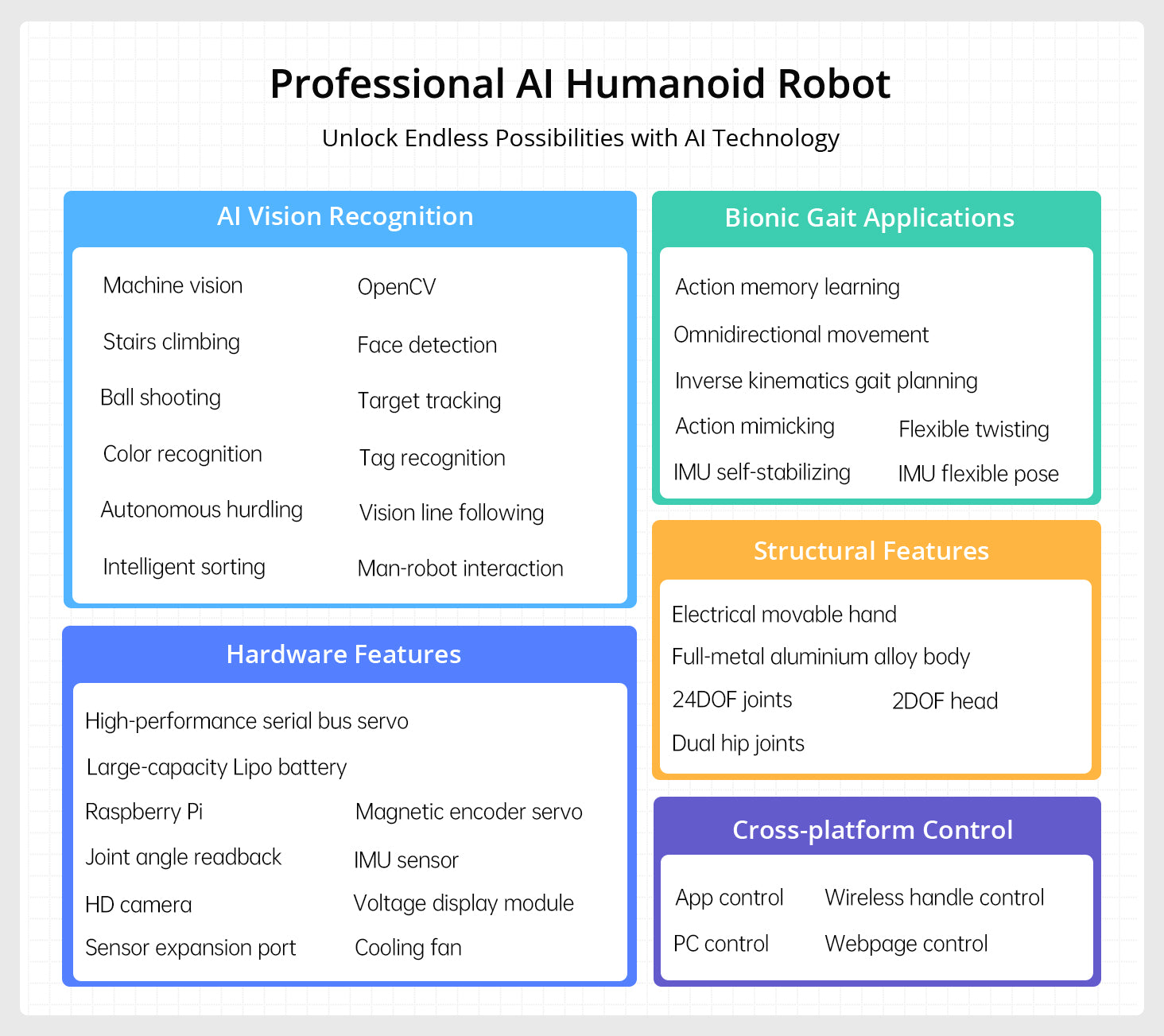
AiNex standard is an intelligent humanoid robot built on the Robot Operating System (ROS). It boasts 24 degrees of freedom (DOF) and is powered by a Raspberry Pi. With self-stabilizing inverse kinematics, AiNex excels in walking, climbing, hurdling, grasping, and performing complex movements. Furthermore, its height, turning radius, and speed can be adjusted!
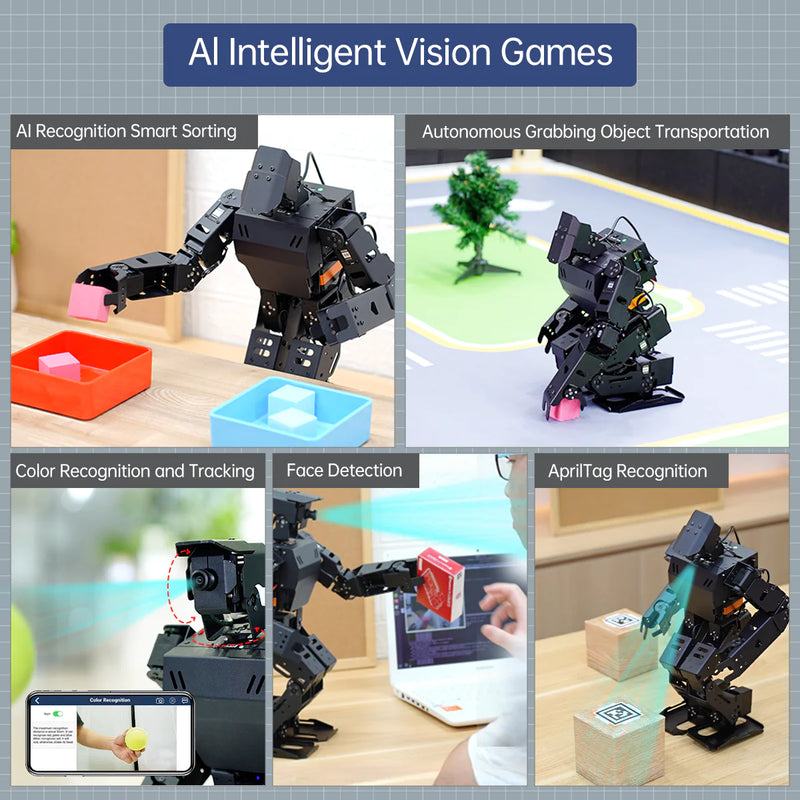
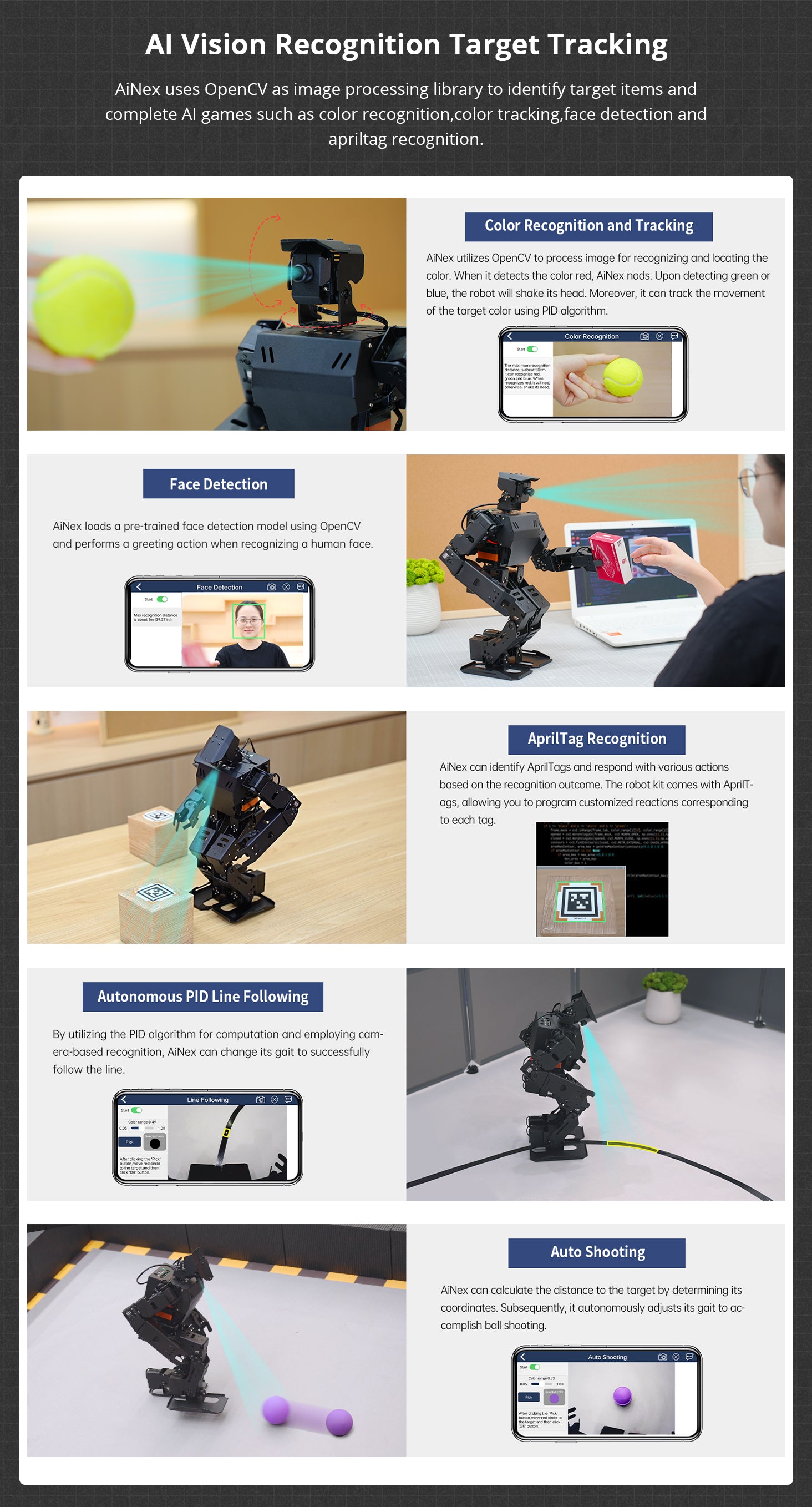
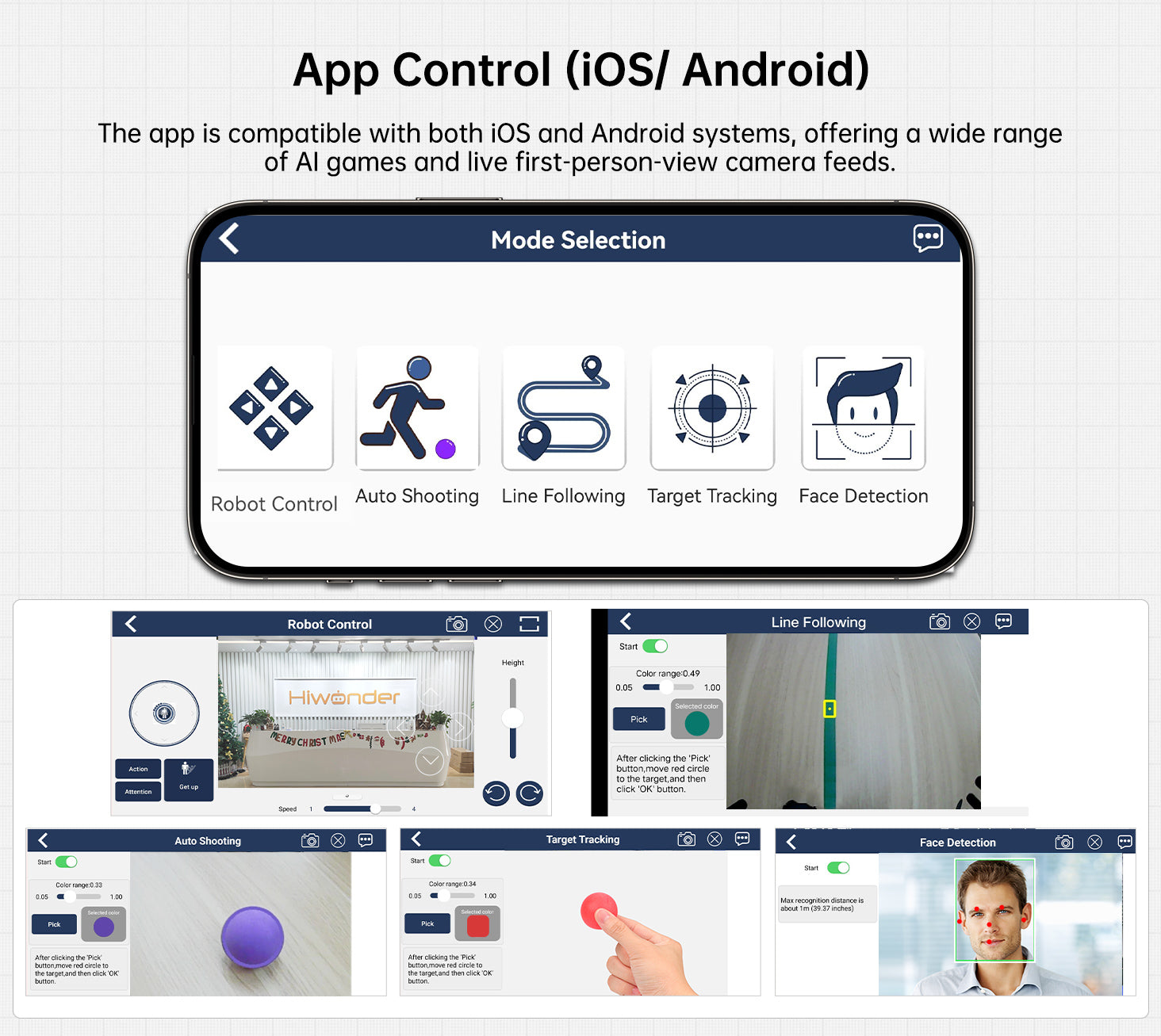
Equipped with a 2DOF AI vision camera and robotic hands that can open or close, AiNex can accomplish tasks like line following, target tracking, ball shooting, intelligent picking and sorting, transportation, stair climbing, and more, using AI vision and advanced kinematics. We offer comprehensive ROS source code and detailed tutorials to bring your AI scenarios to life.
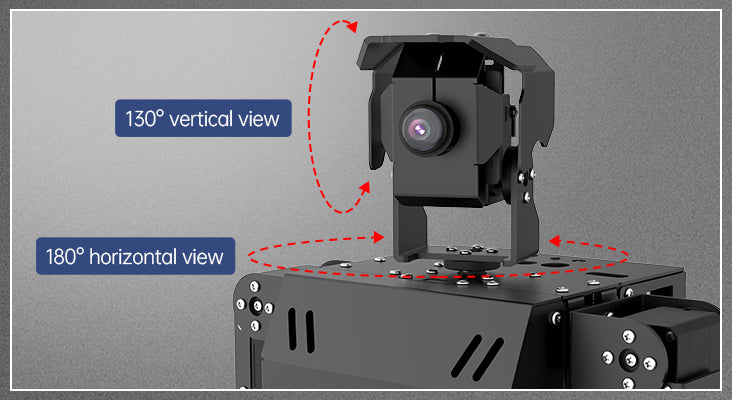
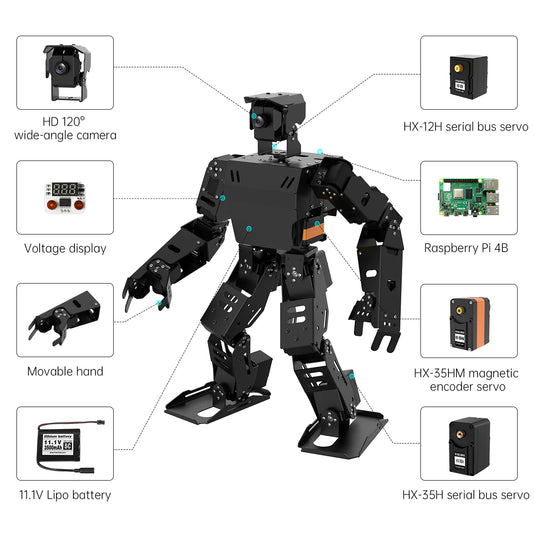
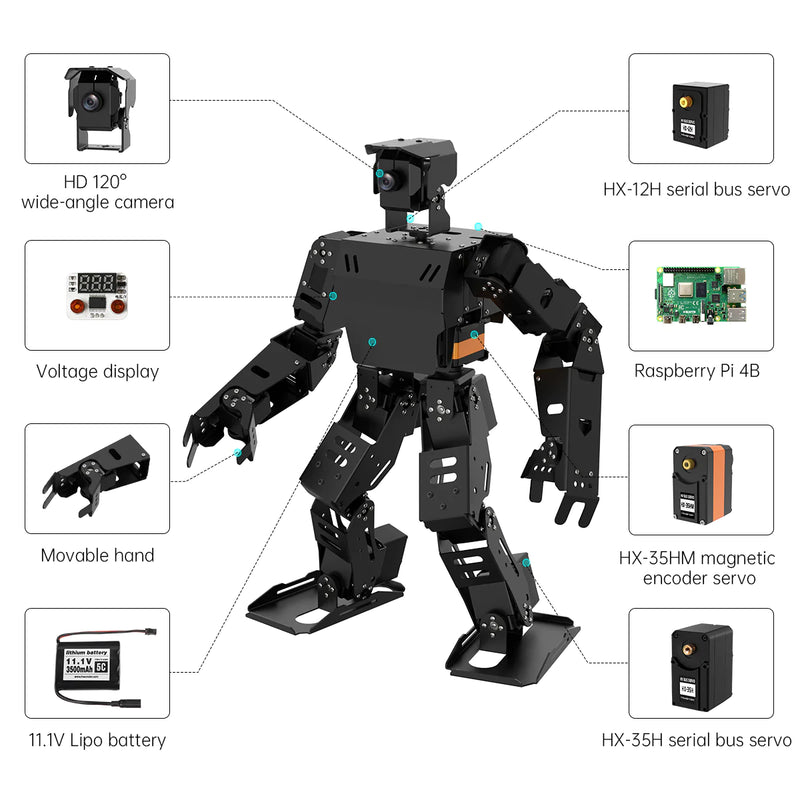
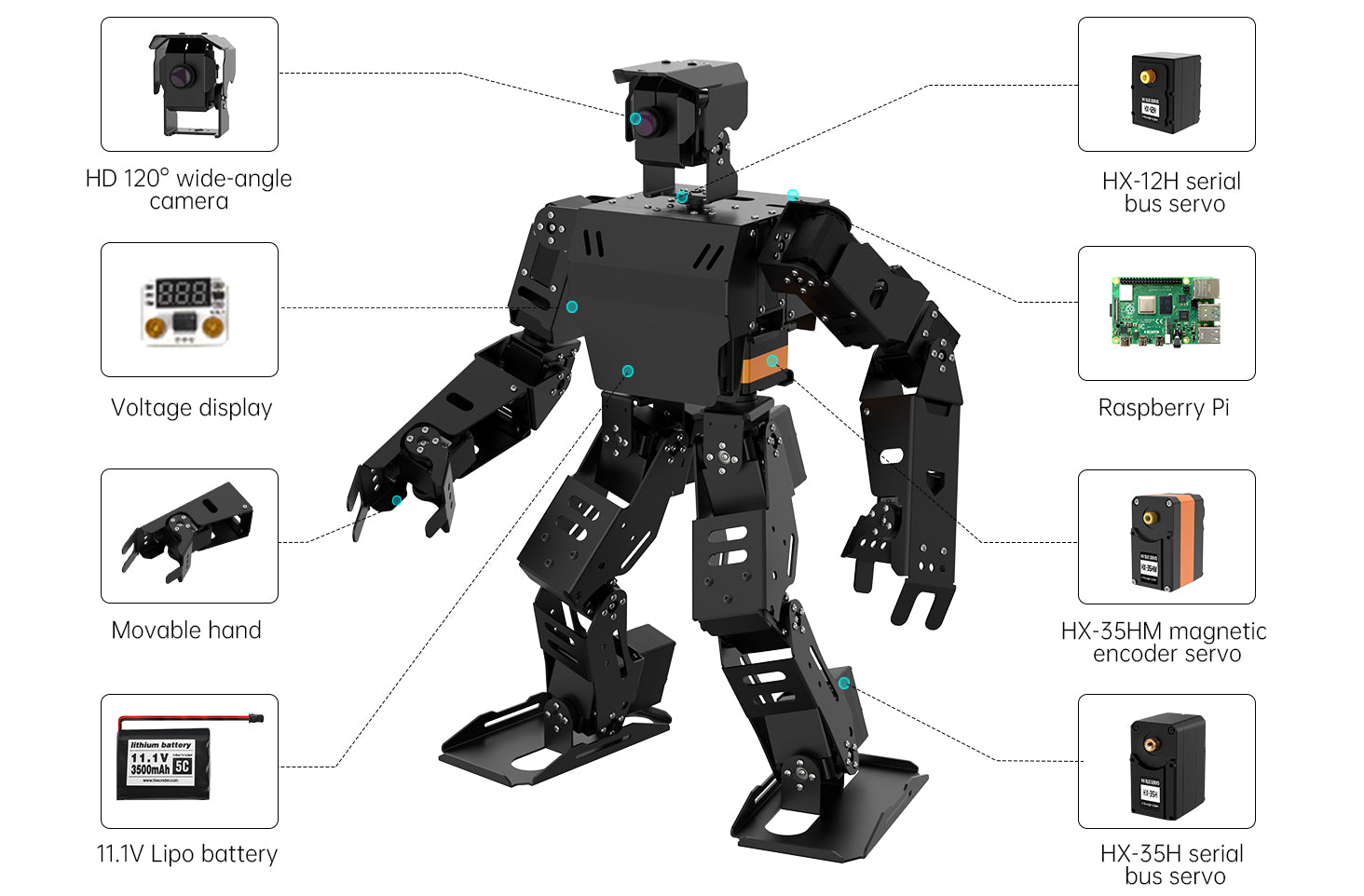
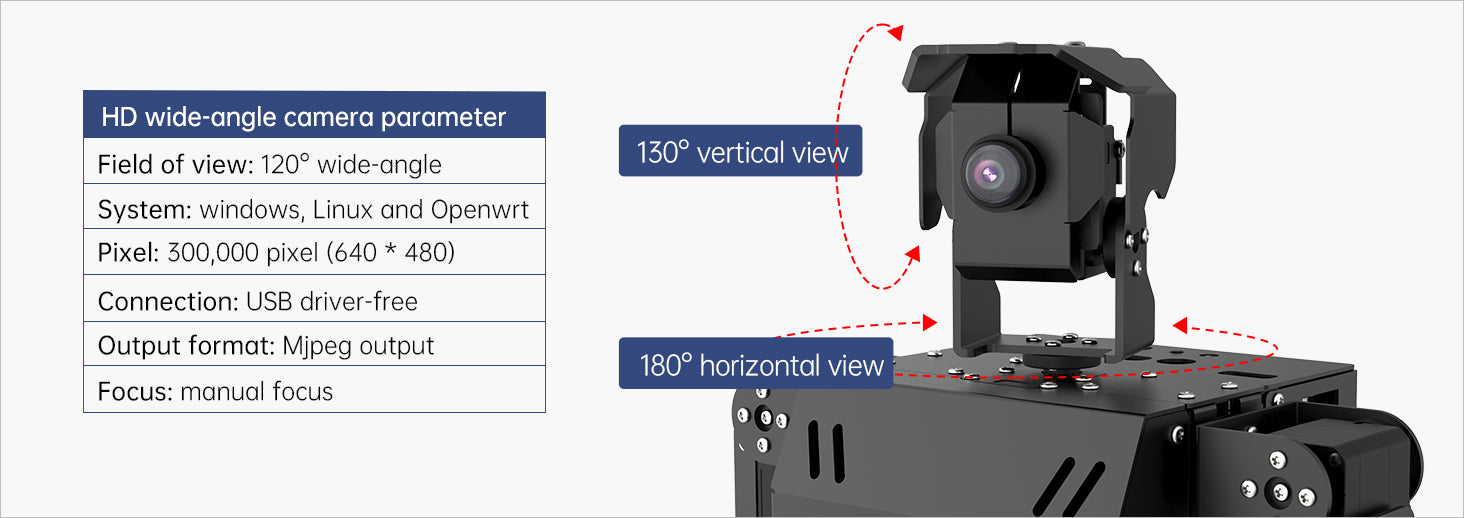
2 DOF HD Wide-angle CameraThe head of AiNex is equipped with a 120° high-definition wide-angle camera, which can effectively identify and locate target objects by utilizing OpenCV image processing. |
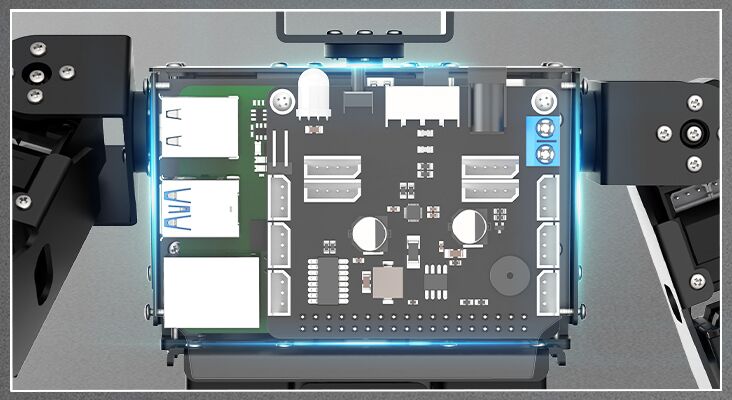
Powered by Raspberry PiAiNex is controlled by a Raspberry Pi and is equipped with intelligent high-voltage bus servos. It is programmed in Python and can complete a variety of AI intelligent applications such as color tracking and face detection. |

Movable Hand Anti-blocking ProtectionAiNex standard can be expanded by mechanical hands, which can flexibly grab and carry small items. The hand servos provide angle and temperature feedback, effectively preventing damage caused by obstructions. |
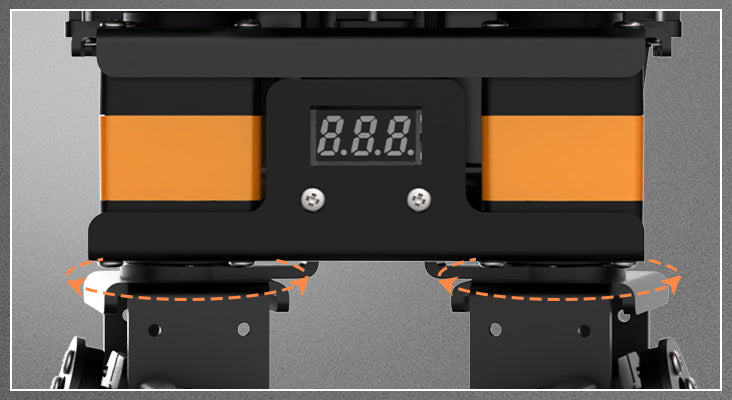
Dual Hip Joints Original StructureAiNex is equipped with two hip joints to support the rotation of the legs on the Z-axis, making the robot more flexible in turning. The hip joint is equipped with a magnetic encoder bus servo, which provides high accuracy and stability. |
24 DOF Aluminium Alloy Structure
AiNex standard is constructed from aluminum alloy and features up to 24 degrees of freedom (DOF), empowering the robot to execute a wide range of actions and ensuring its flexibility in movement.

X, Y, Z Axis Coincident Design
AiNex is equipped with two hip joints to support the rotation of the legs on the X-axis,Y-axis and Z-axis,making the robot more flexible in turning. The structural design incorporates overlapping X-axis,Y-axis and Z-axis, ensuring orthogonal alignment. This integration not only enhances AiNex's bionic qualities but also significantly improves the robot's flexibility in movement.



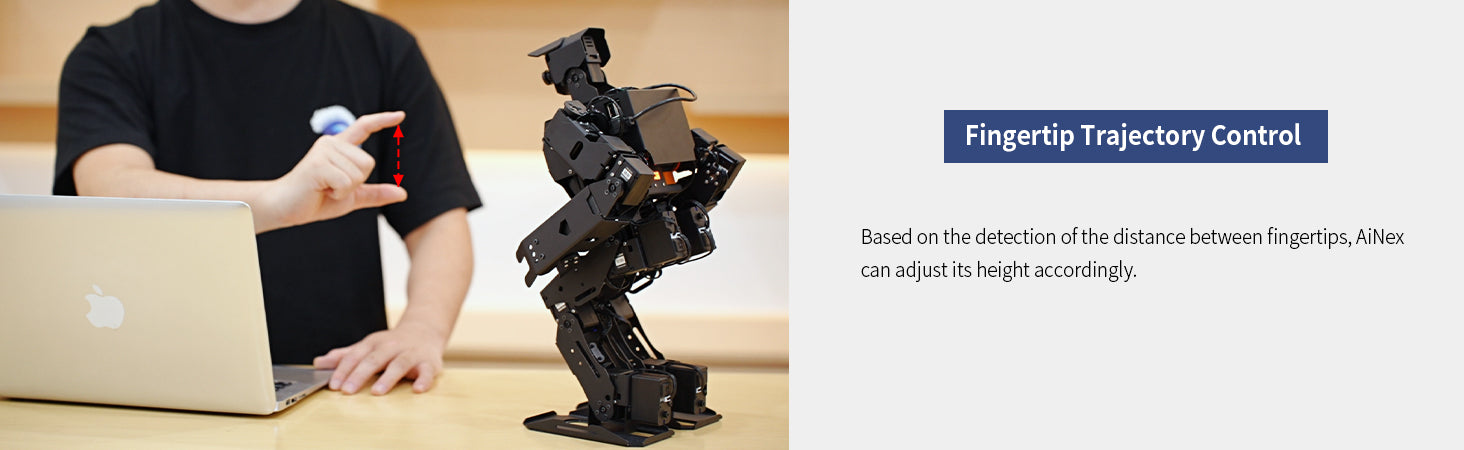
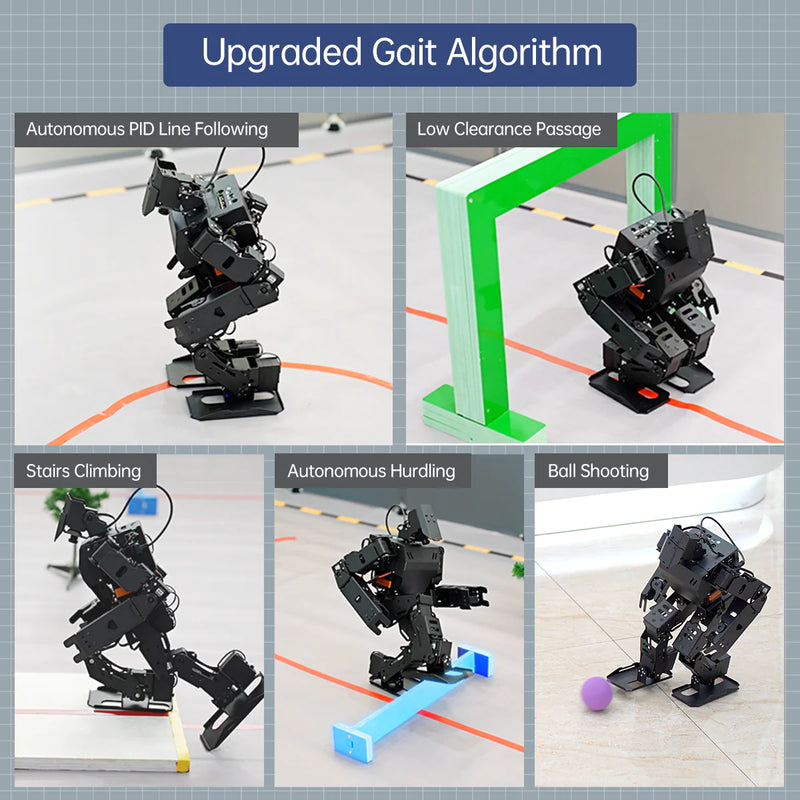
Upgraded Gait Algorithm,Revolutionary Breakthrough

Autonomous PID Line Following |
Low Clearance Passage |
Up and Down Steps |
Autonomous Hurdling |

ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.

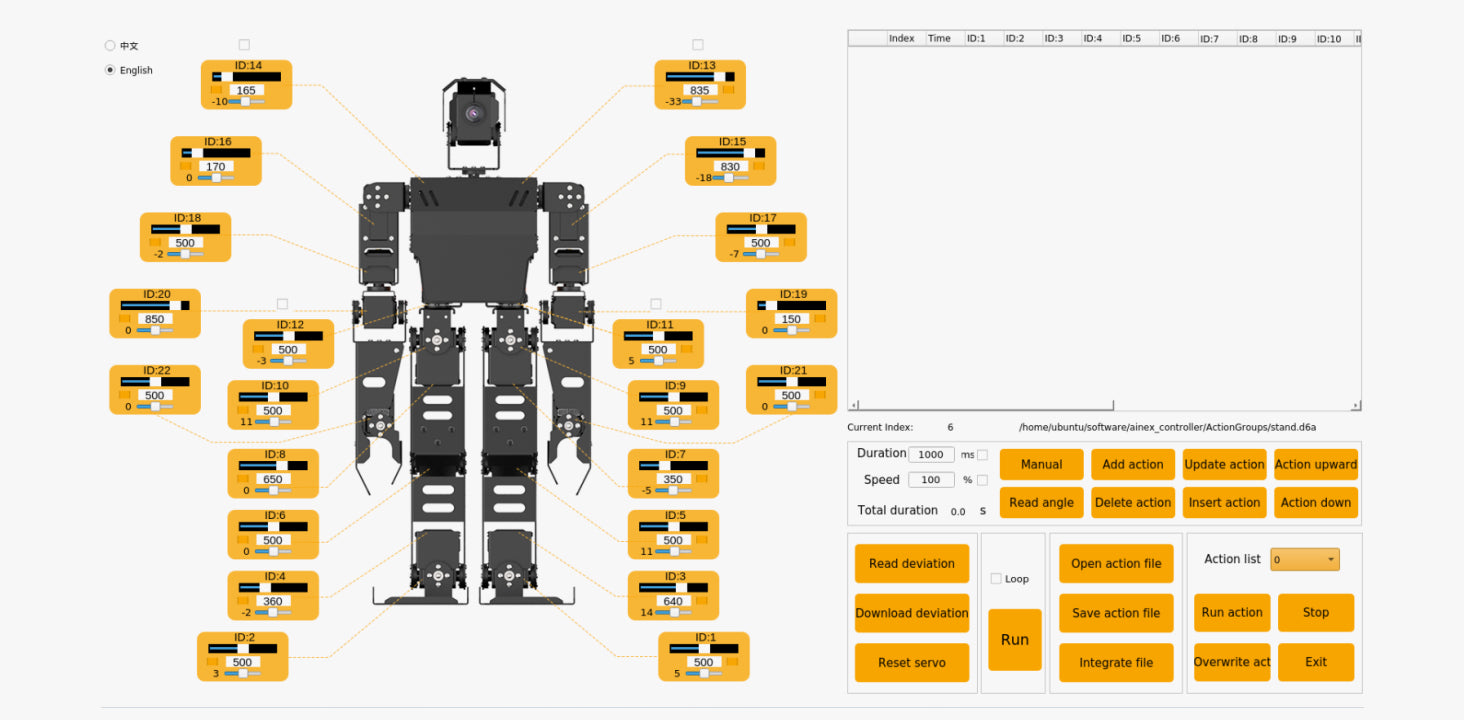
Action Group Editing Software
Debug action on PC software -> Save it to control panel -> Control terminal configures control command. Using graphical PC software, you can effortlessly control servos and customize actions by simply dragging sliders, without the need for programming.
Hardware Highlight
Magnetic Encoder Servo on Hip Joint
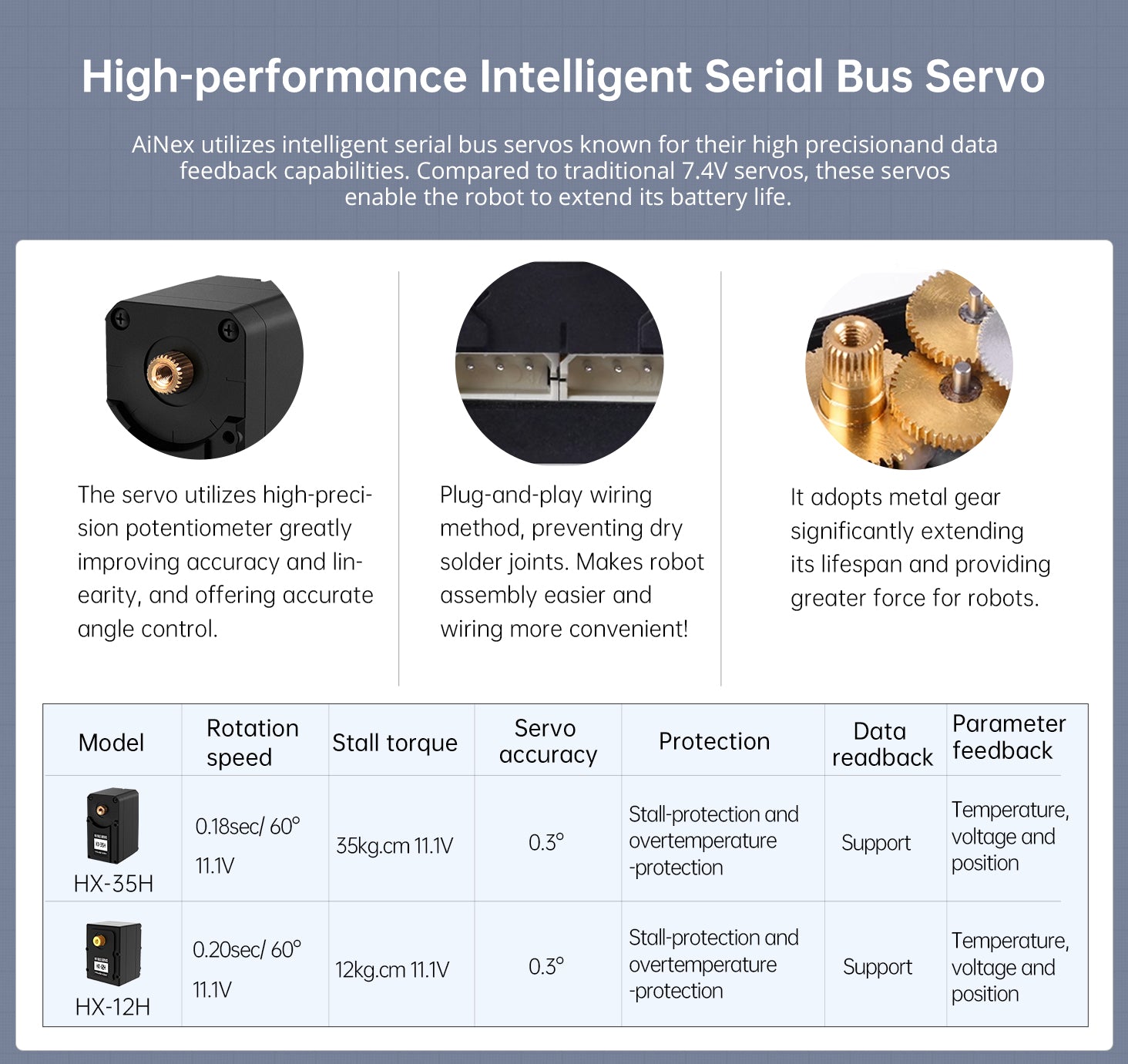
The servo incorporates a 12-bit high-precision magnetic encoder angle sensor, providing non-contact feedback. It boasts a long service life, compact size, and resistance to vibrations.
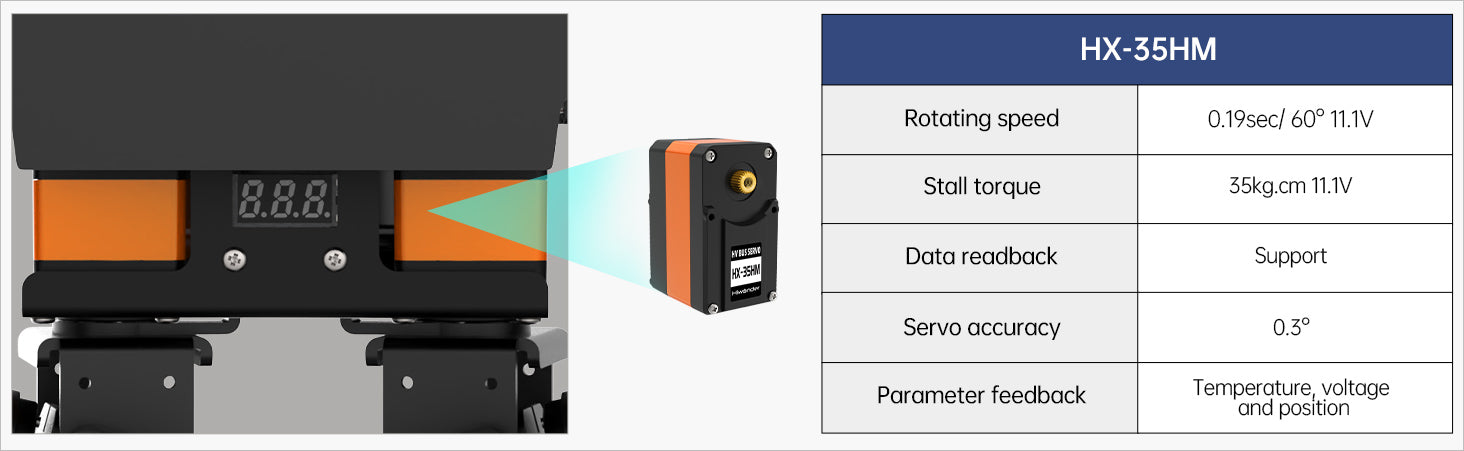
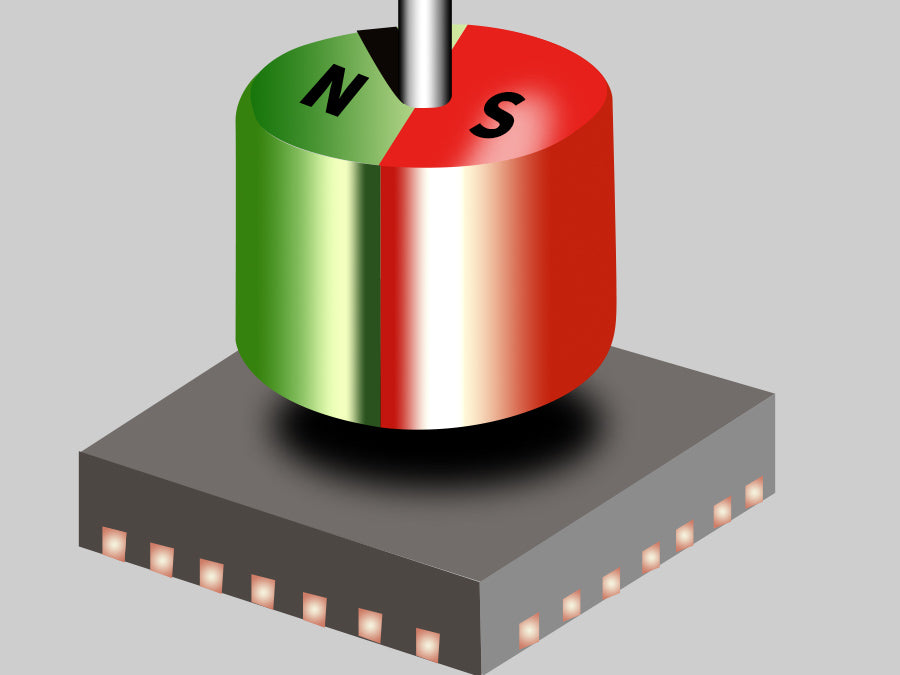
Non-contact Magnetic Encoder FeedbackUnlike the traditional position feedback mechanism using a potentiometer, the HX-35HM servo employs non-contact magnetic feedback. This feature enhances service life, reduces size, and improves shock resistance. |

High Precision Magnetic EncoderCompared with potentiometer, the 12-bit high-precision angle magnetic encoder sensor extends its angle range to 360 degrees while maintaining a 4096-bit absolute position accuracy. |
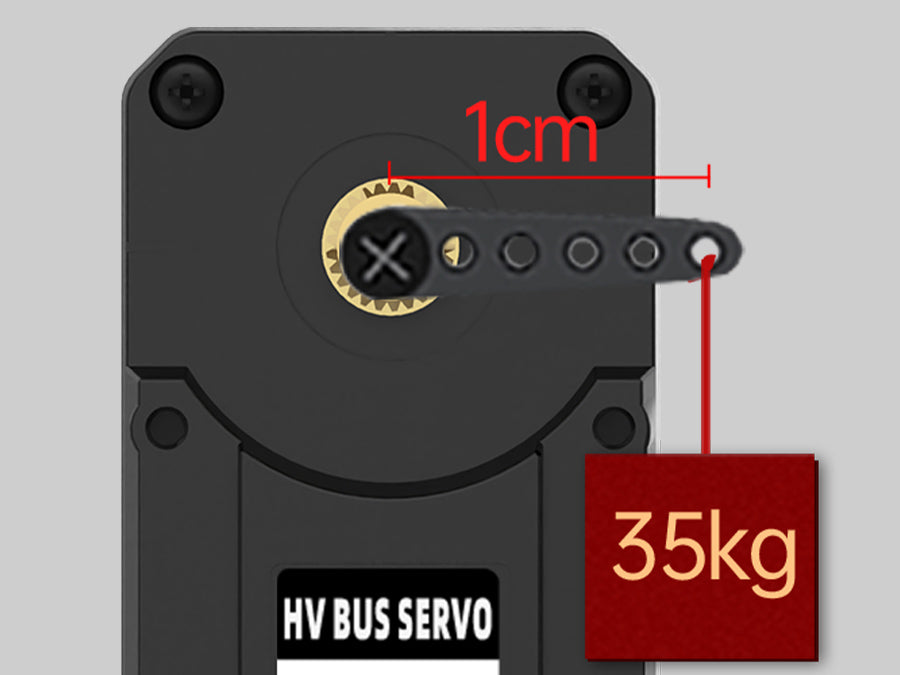
35KG Strong TorqueThe stall torque of the HX-35HM servo reaches 35kg.cm under 12V voltage, giving your robot more power. |

CNC Metal ShellThe HX-35HM servo boasts high accuracy and excellent heat-conducting properties with its aluminum alloy shell. Through anodic oxidation processing, it exhibits robust resistance to corrosion. |
2DOF HD Wide-angle Camera
AiNex's head can rotate in all directions—up, down, left, and right-and is equipped with a 120° HD wide-angle camera. This empowers the robot with a broad field of view. The camera also supports manual focus.
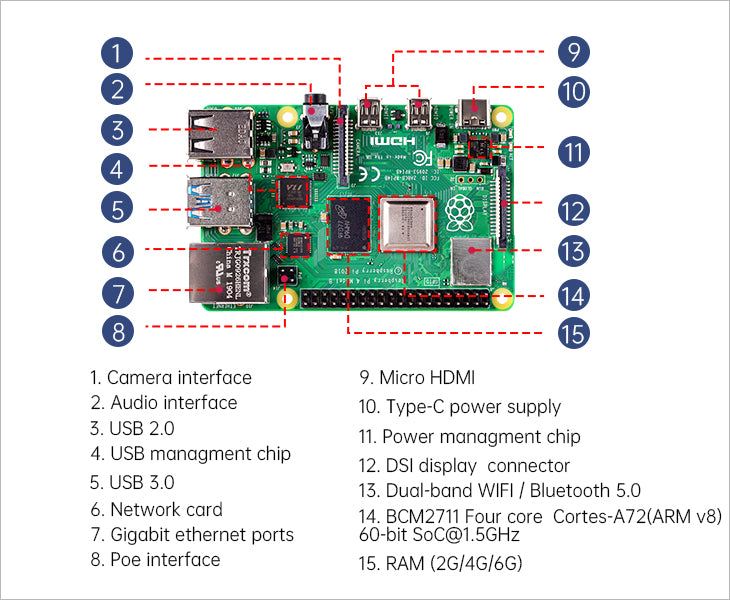
Raspberry Pi 4B board |
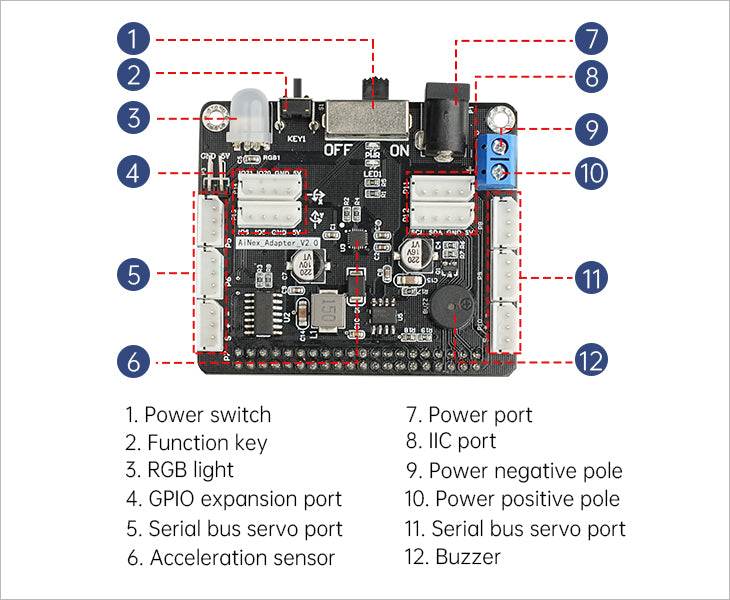
Raspberry Pi Expansion Board |
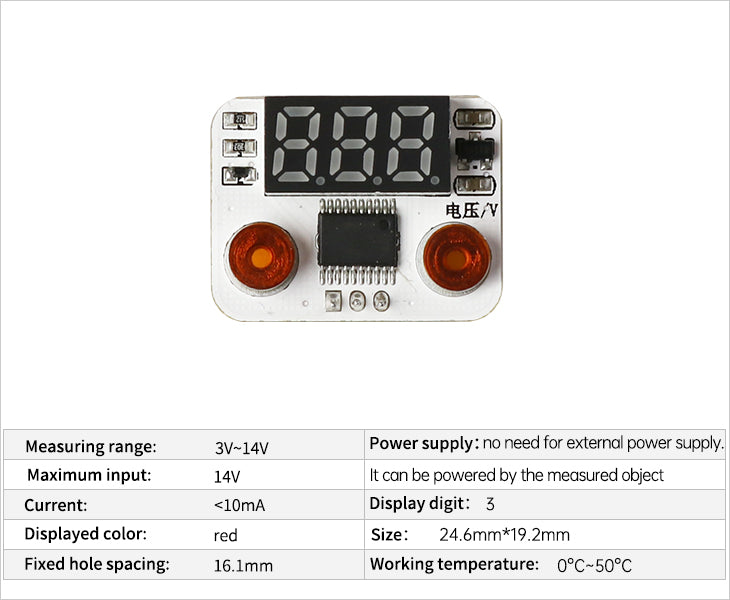
Voltage Display Module |
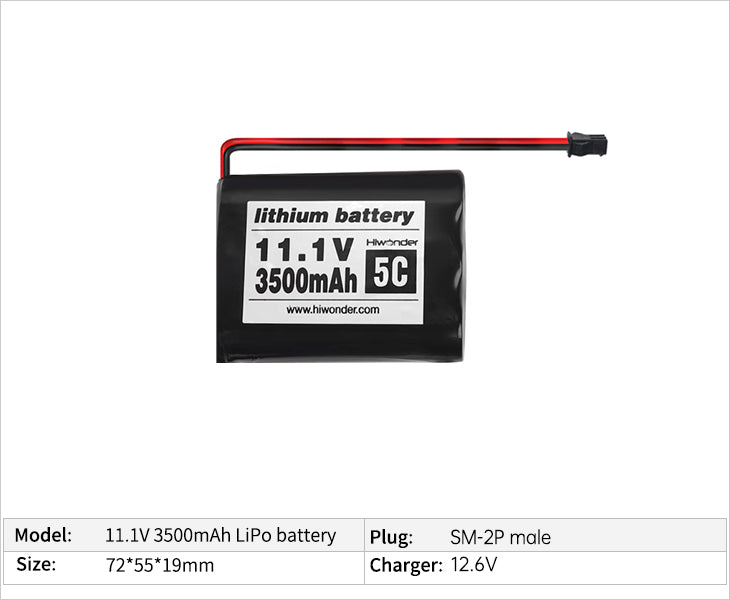
11.1V 3500mAh Lipo Battery |

ROS/ SDK Deep Development
AiNex is built on Robot Operating System (ROS), enabling flexible deployment and expansion of robot's functionalities. Furthermore, we offer comprehensive source code and ROS simulation models to facilitate convenient ROS algorithm research and secondary development.

Gazebo Simulation
AiNex standard utilizes the ROS framework and offers Gazebo simulation support. Gazebo provides a novel approach for controlling AiNex and validating algorithms within a simulated environment, reducing the need for physical experiments and enhancing efficiency.

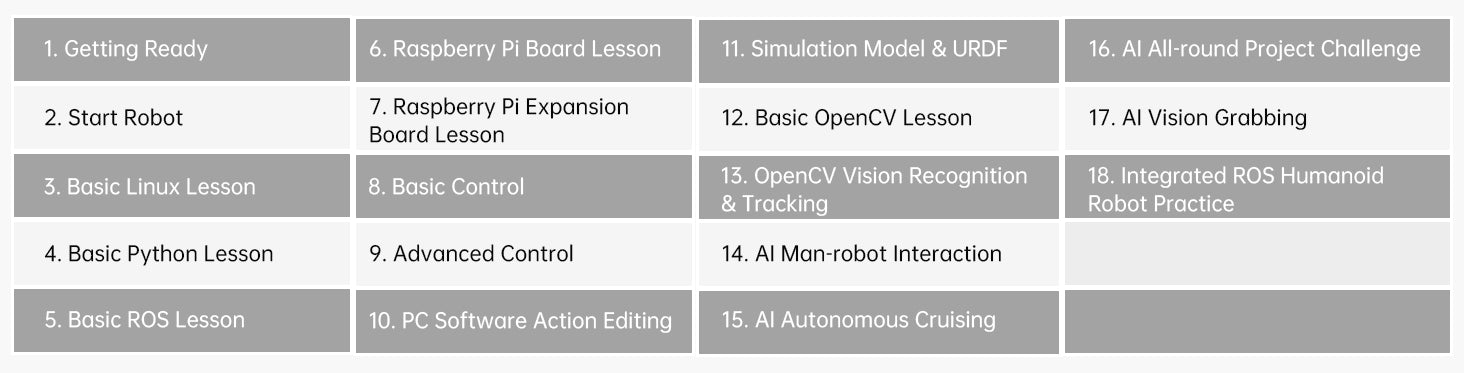
Abundant Learning Materials
Application Scenarios

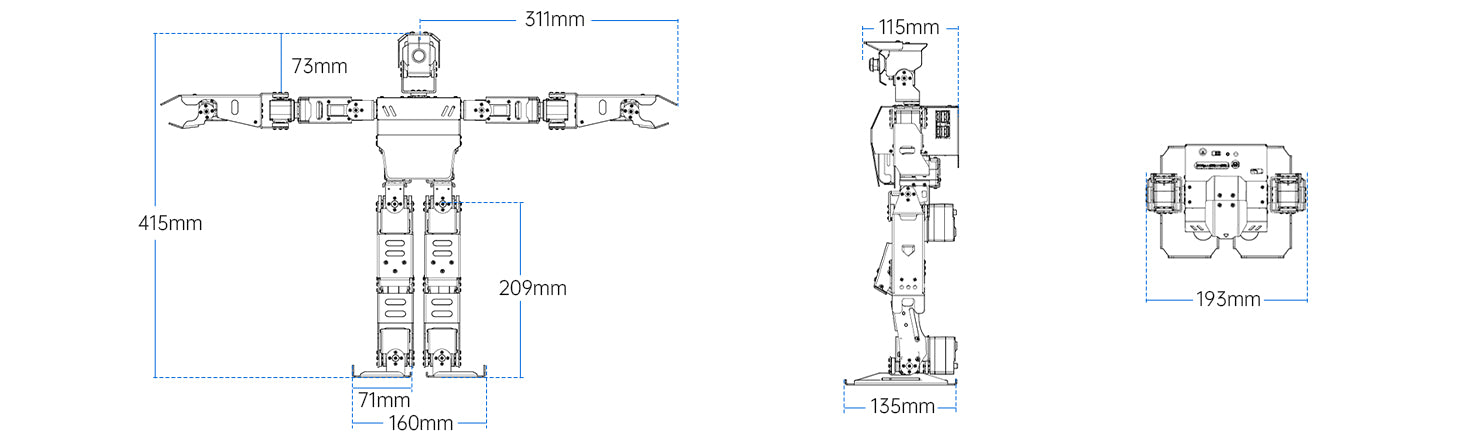
Specification Parameters
|
|
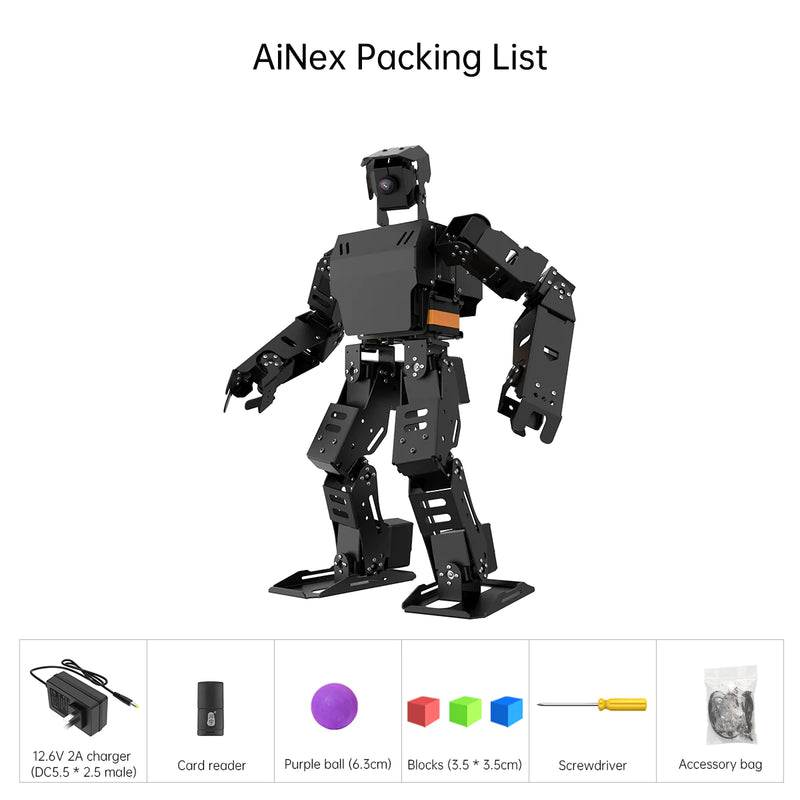
AiNex Starter Kit Packing List

AiNex Standard Kit Packing List

Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.