

























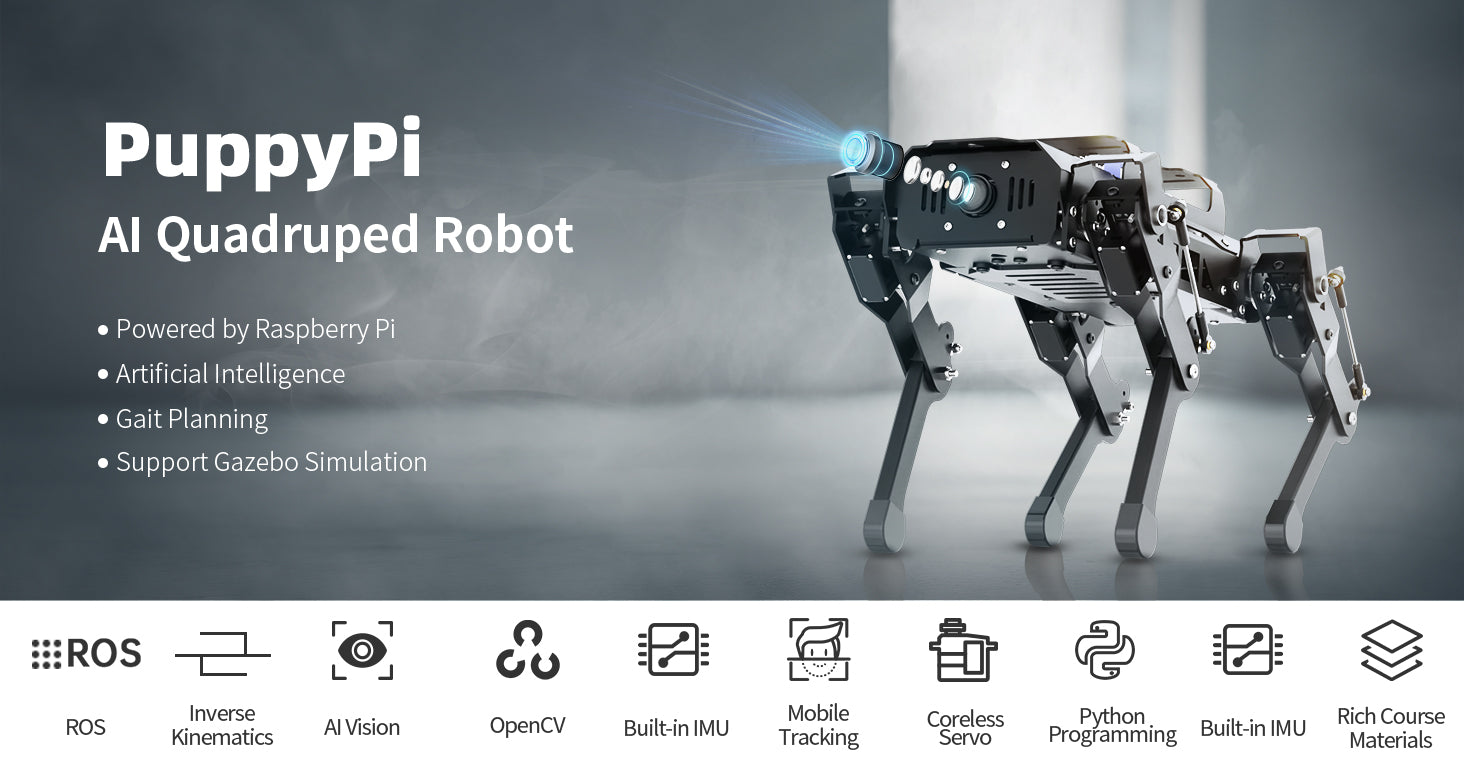
PuppyPi is an AI vision quadruped robot driven by Raspberry Pi and built on the Robot Operating System (ROS). It is equipped with 8 stainless steel coreless servos, delivering high-precision performance, rapid rotation speed, and a robust torque of 8KG.cm. With an IMU sensor, PuppyPi can detect its posture in real-time, enabling self-balancing capabilities.
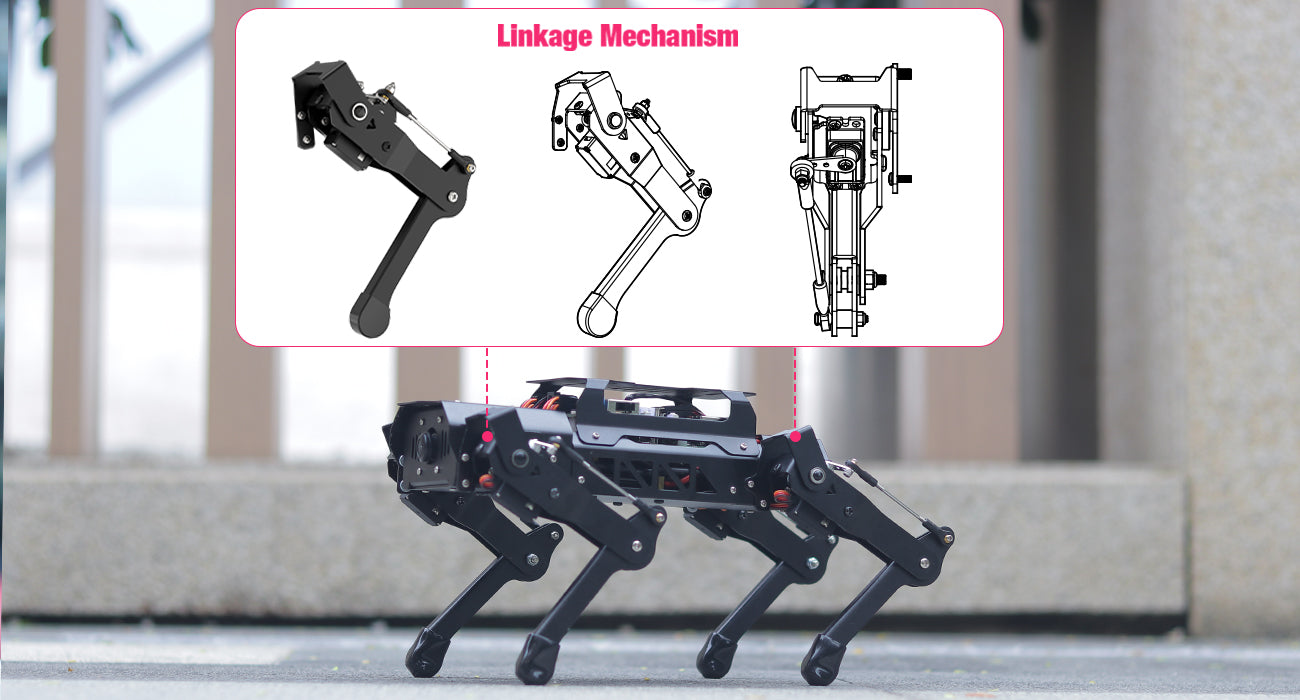
Linkage Mechanism, Efficient MovementPuppyPi's legs employ a linkage mechanism to increase the angular velocity of its lower legs. The independent movement of different parts of the leg contributes to a greater rotation range. |

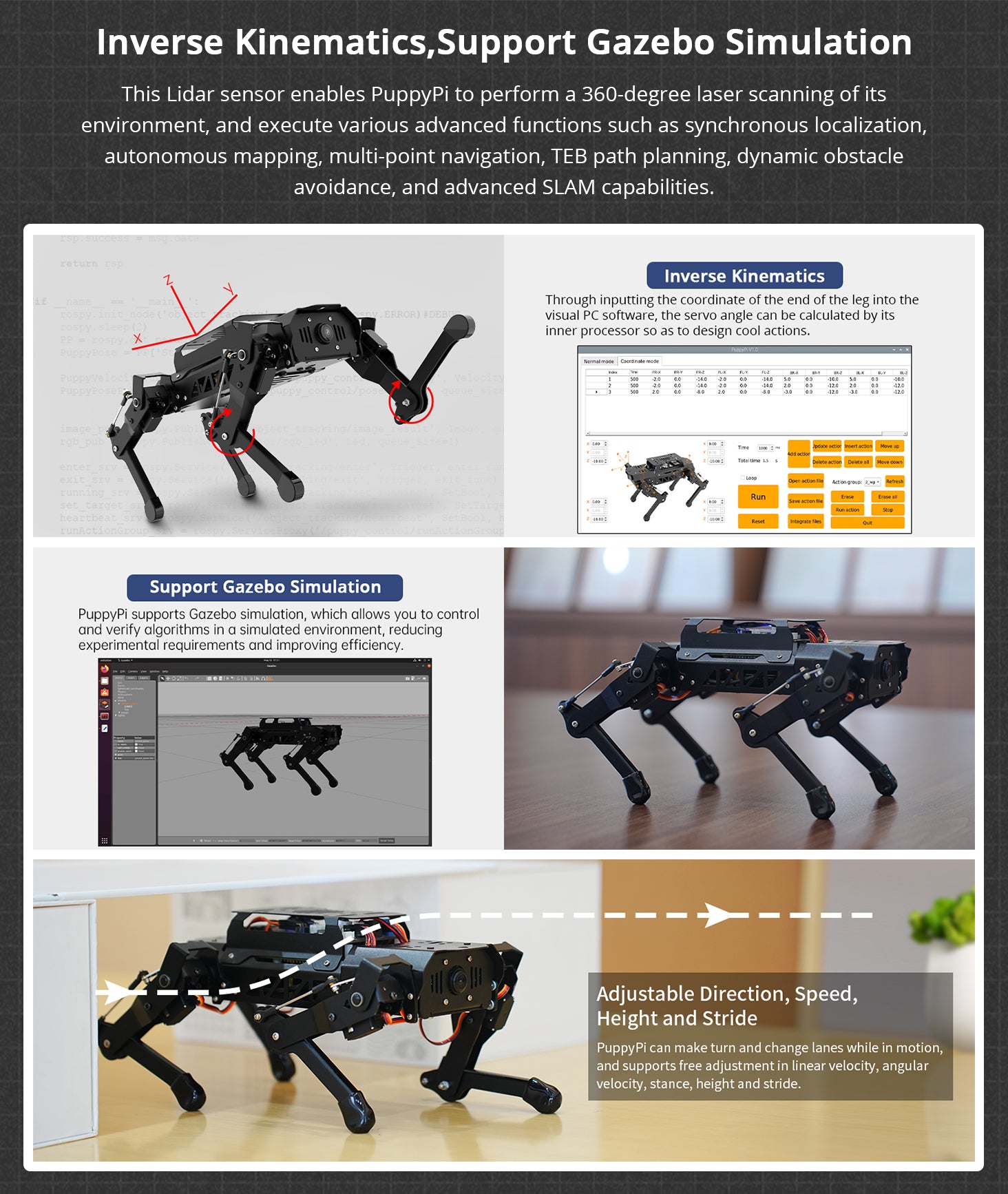
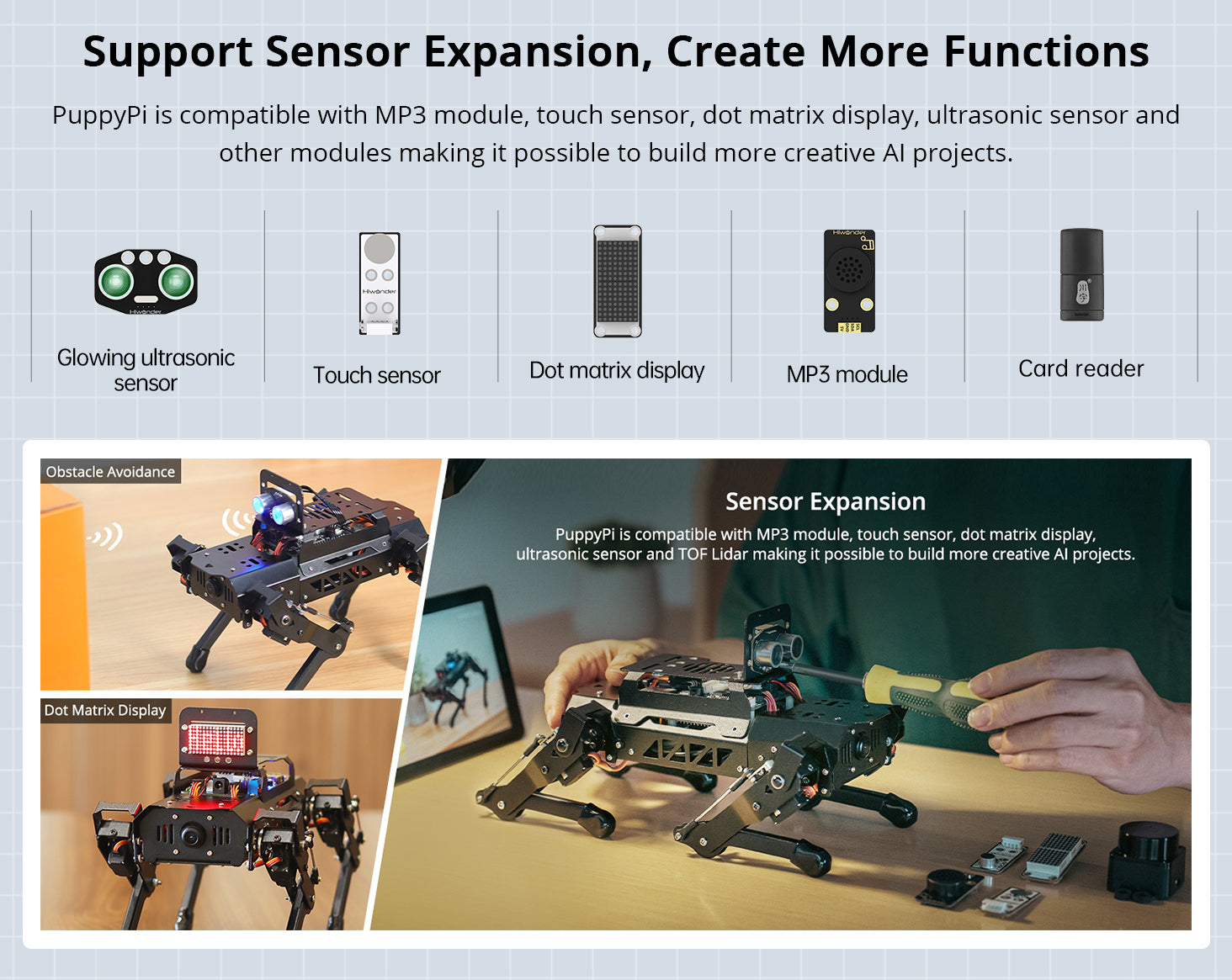
Gait Planning, Free AdjustmentWalk, Amble and Trot gaits can be realized through adjusting touchdown time, lift time and lifted height of each leg as well as the speed of switching front legs and hind legs. |

Equipped with Coreless ServosEquipped with stainless steel coreless servos which features high accuracy, fast rotation speed and strong torque. |

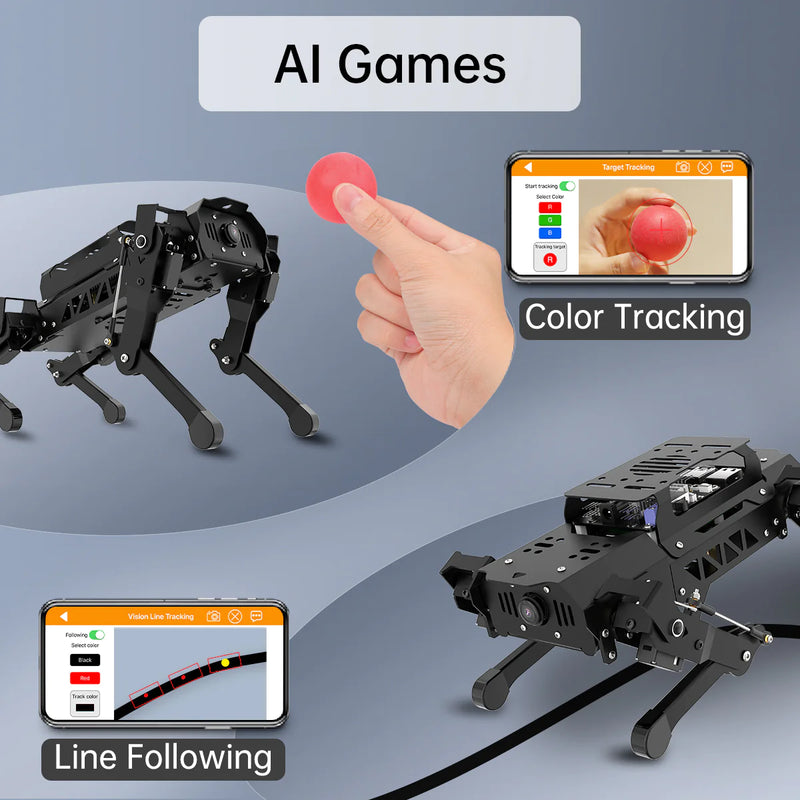
FPV Image Feedback, APP ControlPuppyPi supports Android and iOS dual-system APP control, which not only allows body remote control, but also allows you to see the first visual image of the robot dog. |

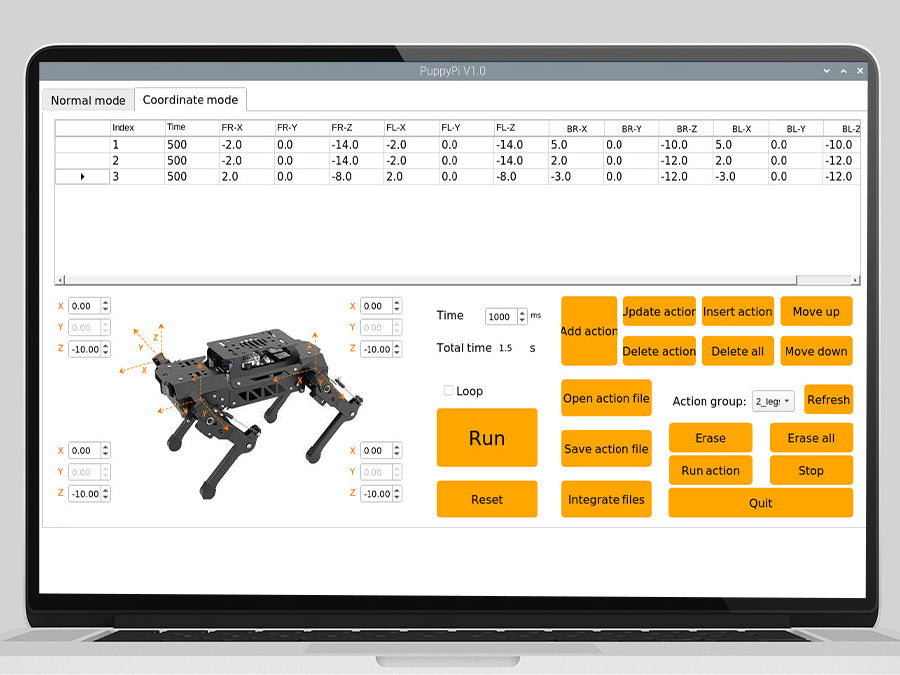
PC Software ControlThrough PC software PuppyPi's its height and inclination can also be adjusted to make it turn as walking. |

Support APP ControlAndroid and iOS mobile APP are available. Via the APP, you can remotely control the robot and view what the robot sees. |

Python ProgrammingAll intelligent Python code is open source, with detailed annotations for easy self-study. |
Intelligent Self-balancingThe built-in IMU sensor can monitor PuppyPi's posture in real-time to adjust its joints to balance the body. |
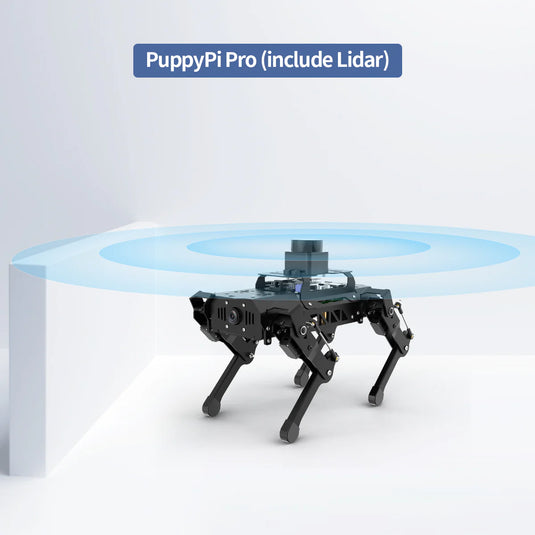
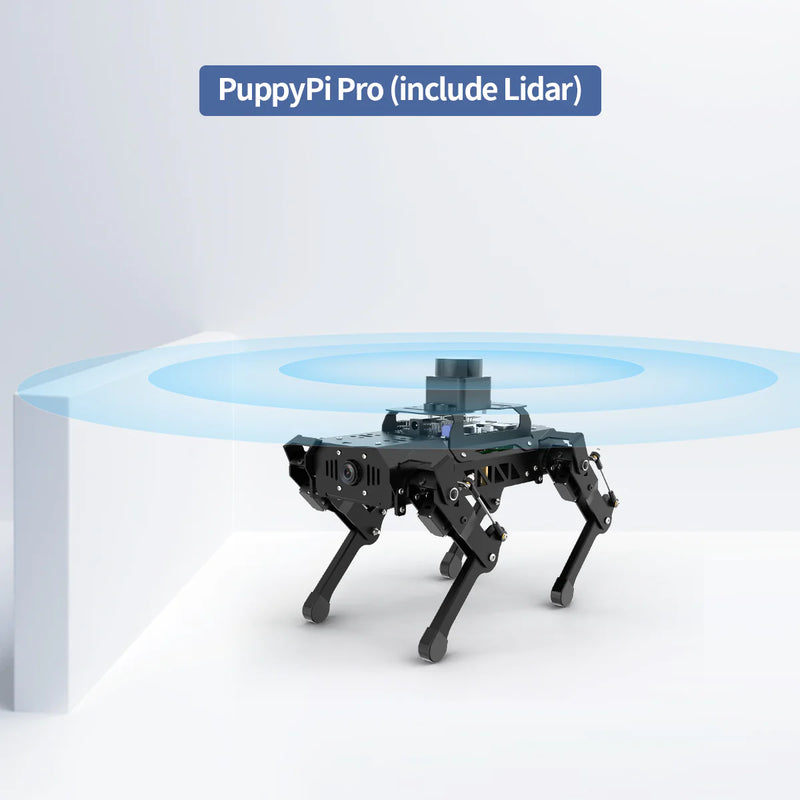
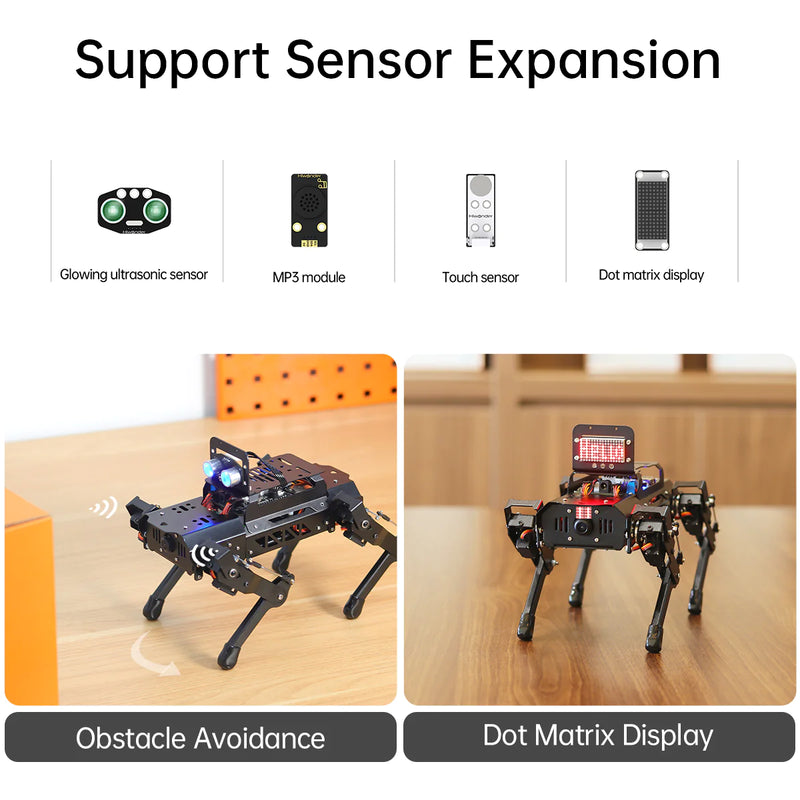
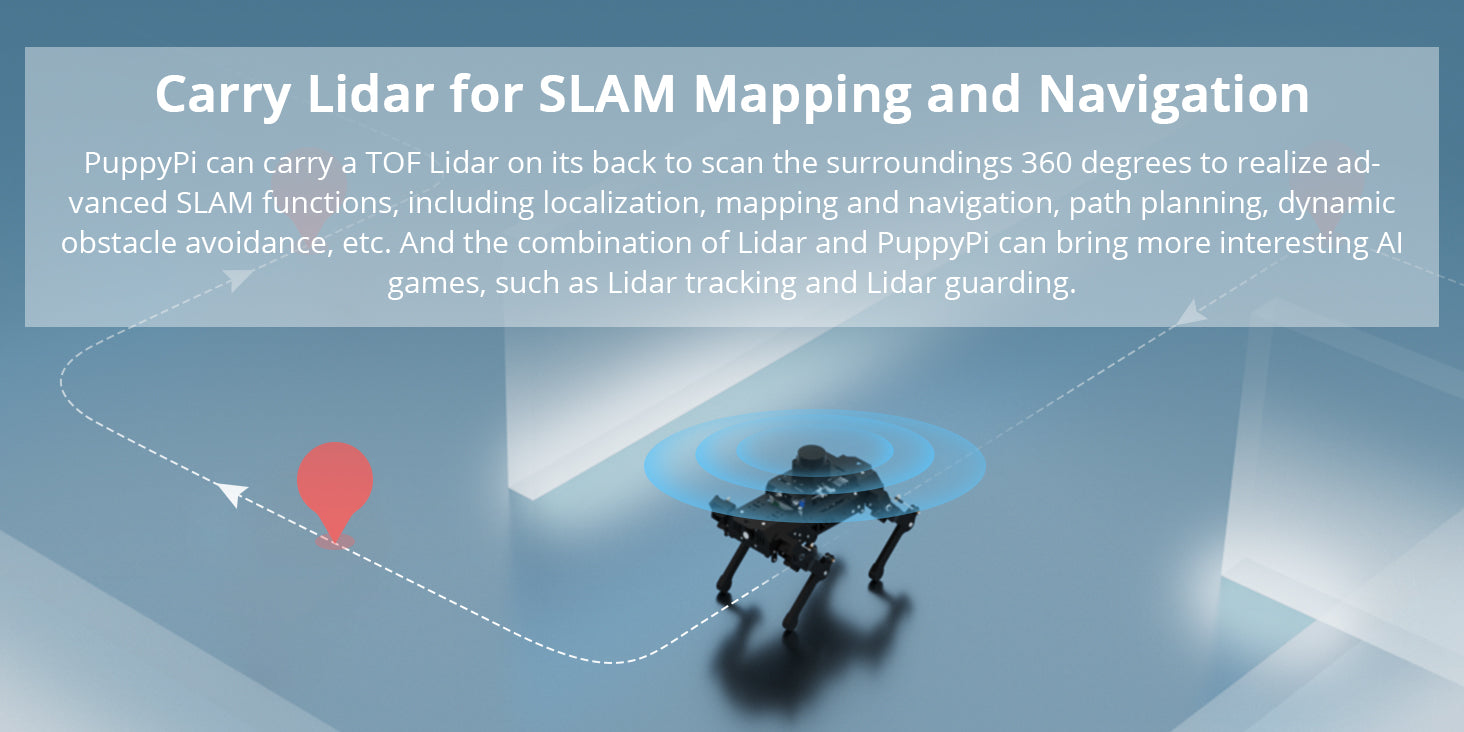
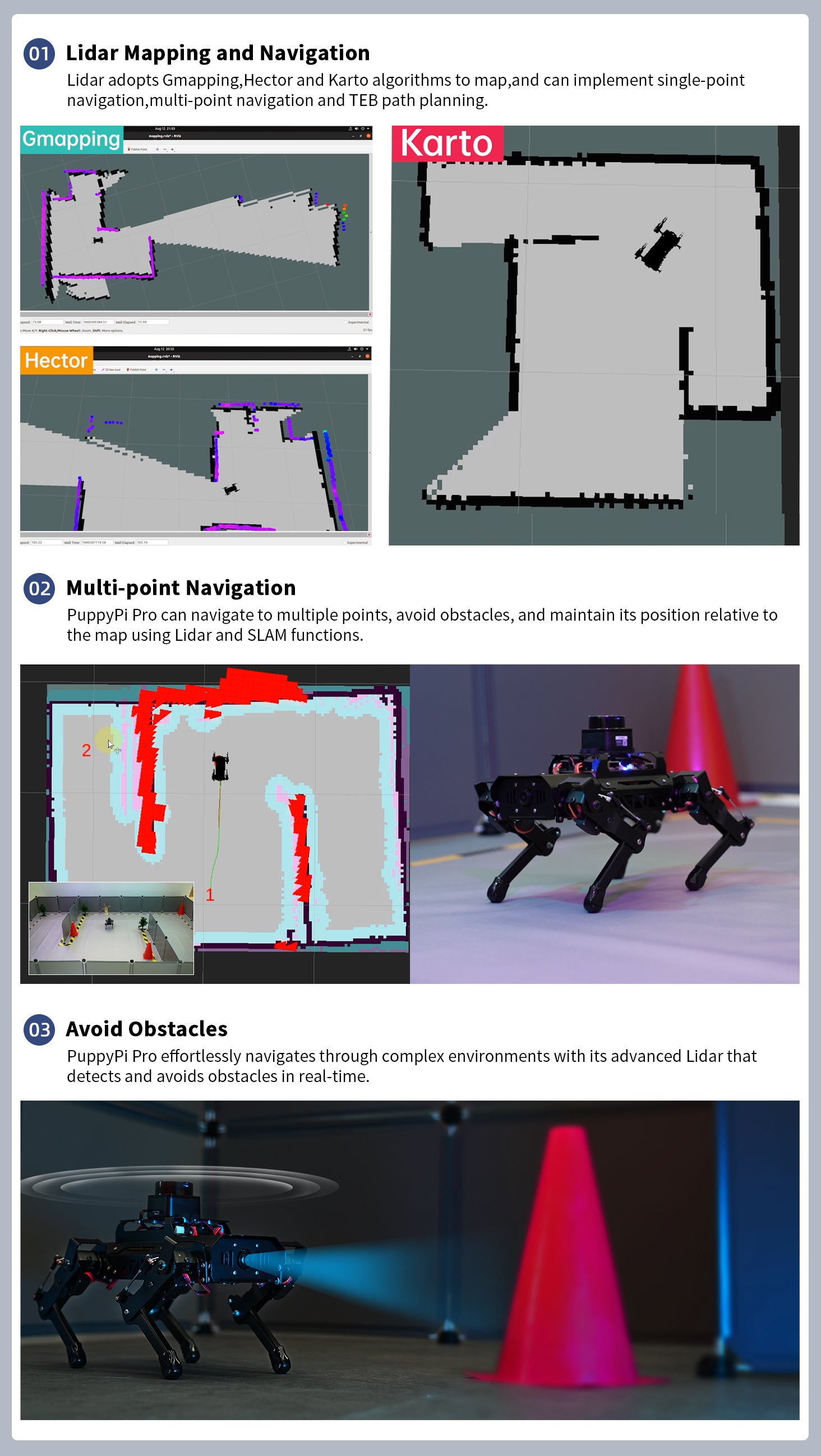
Lidar Functions
PuppyPi Pro is equipped with a mini TOF lidar.

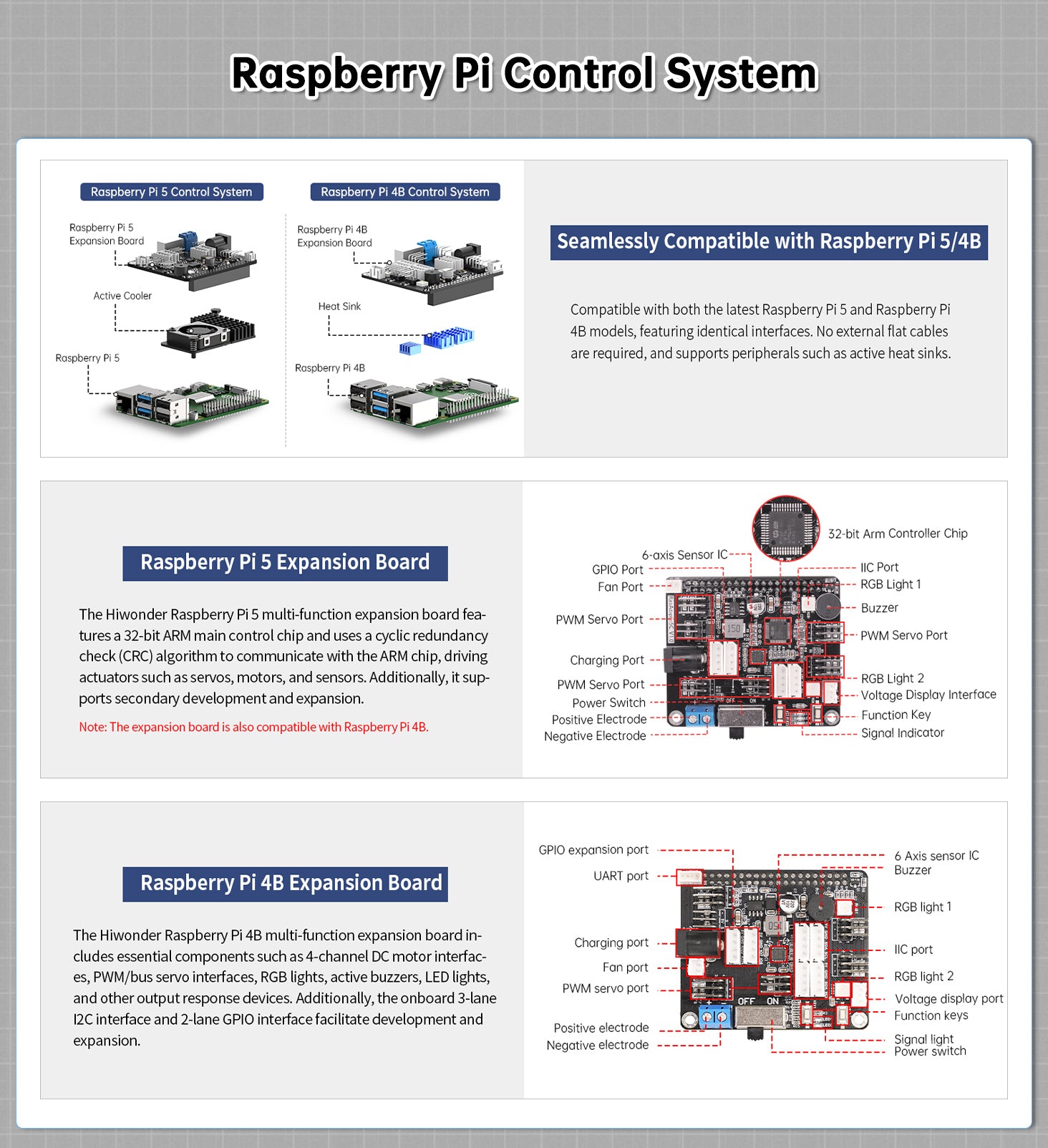
ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.

Product Structure
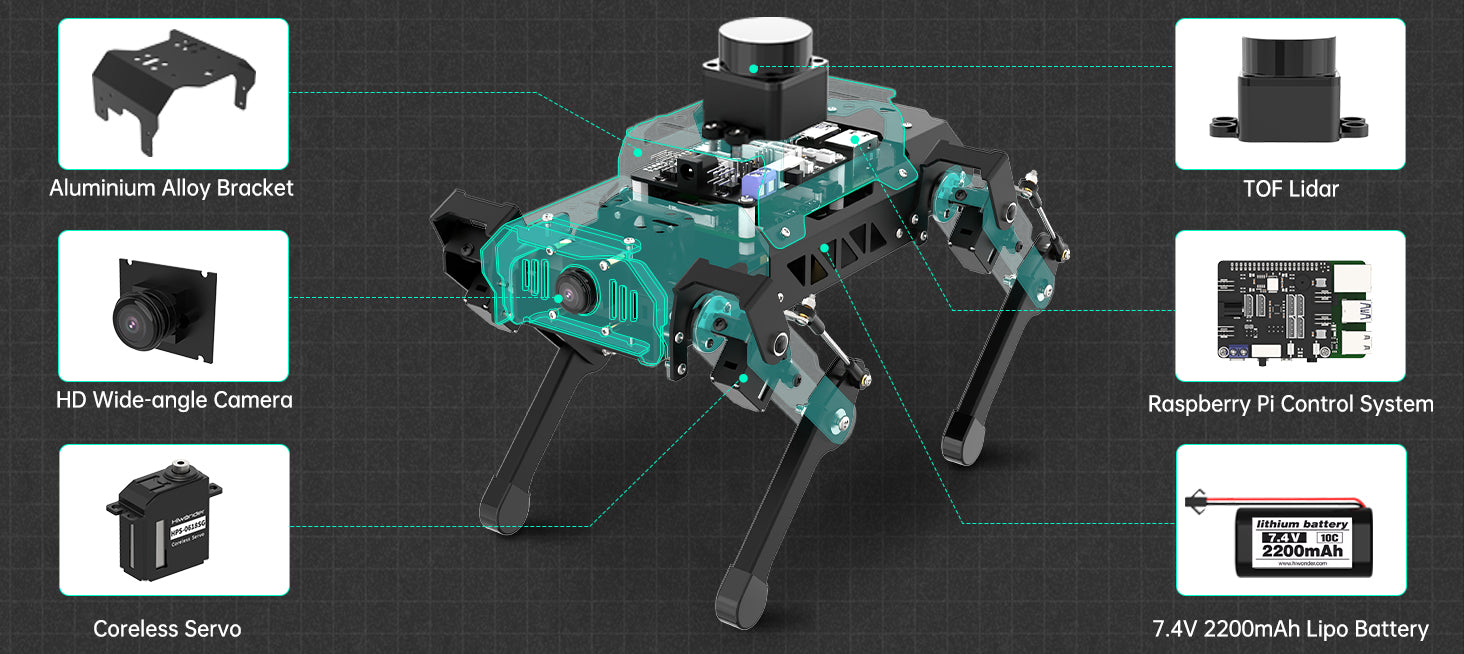
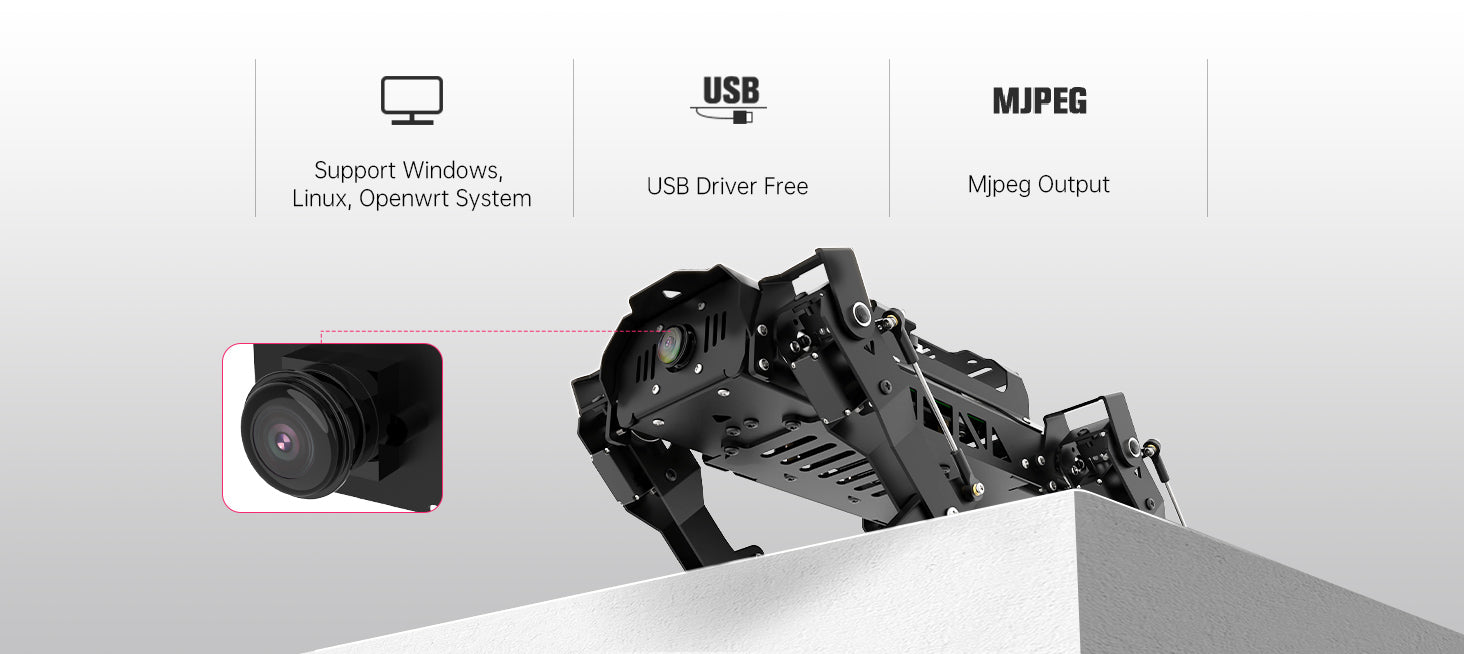
HD 130° Wide-angle Camera
Powerful Coreless Servo

TOF Lidar
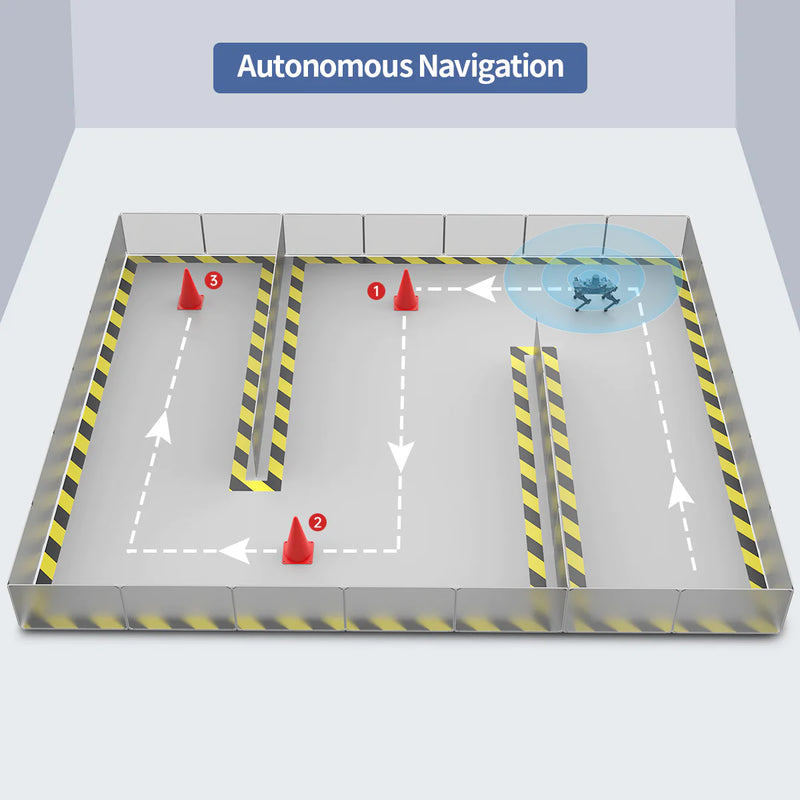
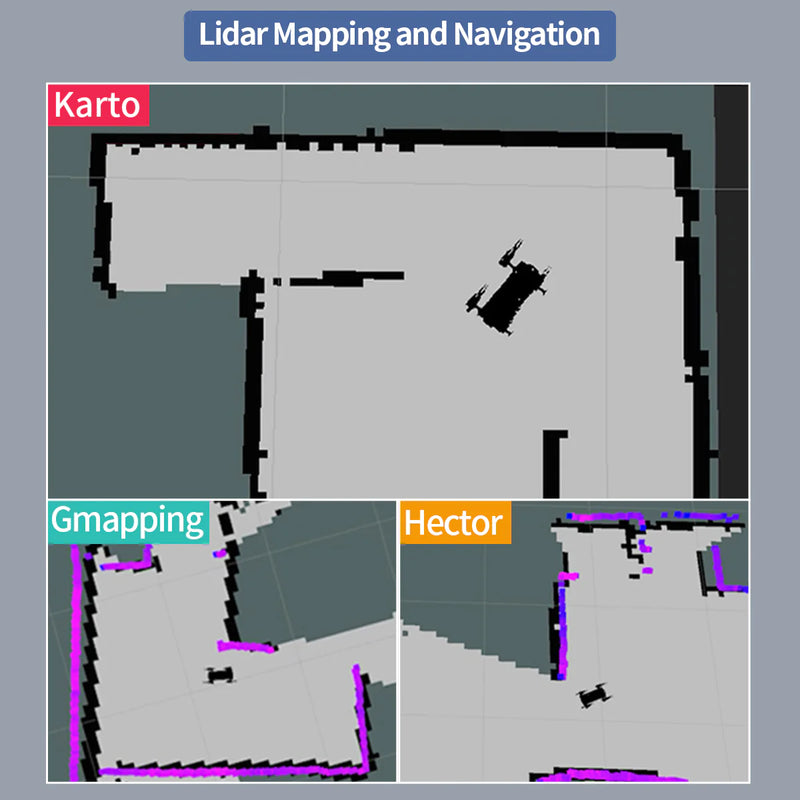
LiDAR-STL-19P-TOF Lidar ranges by the means of Time-of-flight (TOF). Its ranging radius reaches 12m and the ranging frequency is 4500Hz. Lidar together with ROS can achieve indoor mapping and navigation with ease.

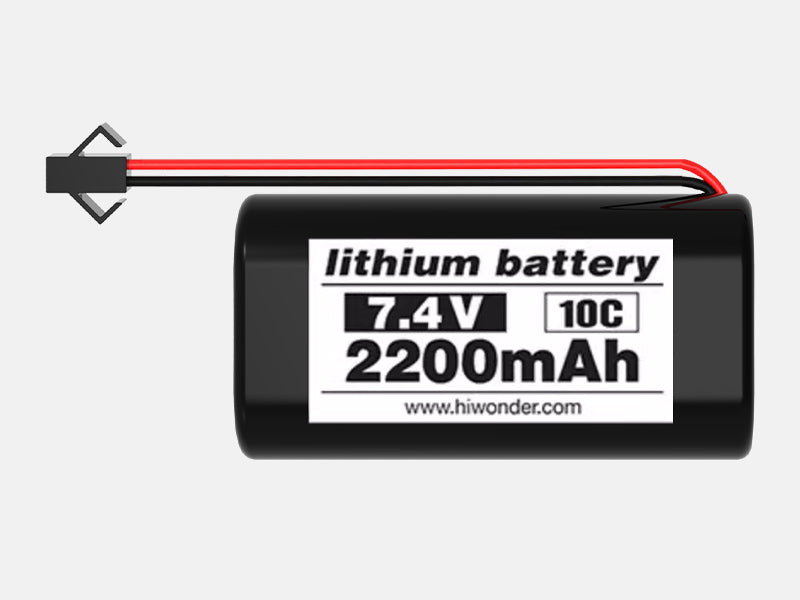
High-rate Lipo BatteryAdopt 7.4V 2200mAh 20C built-in high-rate Lipo battery extending PuppyPi's working time to 60 minutes. |
Aluminium Alloy BodyAluminium alloy structure contributes to outstanding fall-resistance, anti-collision, inner protection, rigidity and load capacity! |

Voltage Display ModuleVoltage display module can display the current battery level of PuppyPi letting you charge in time! |

Specification Parameters
Product Parameters |

Dimensional Diagram |
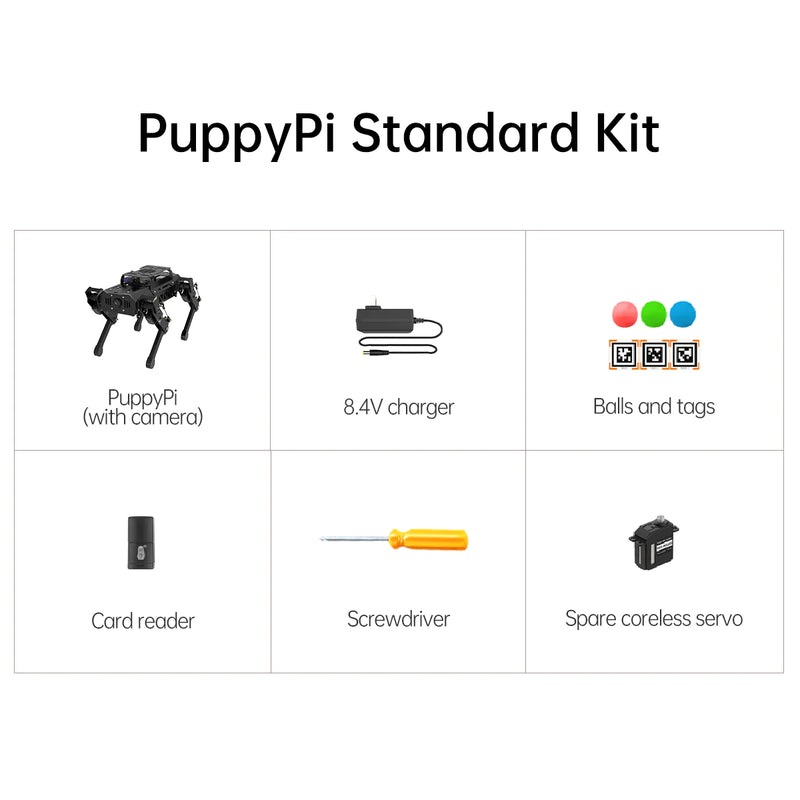
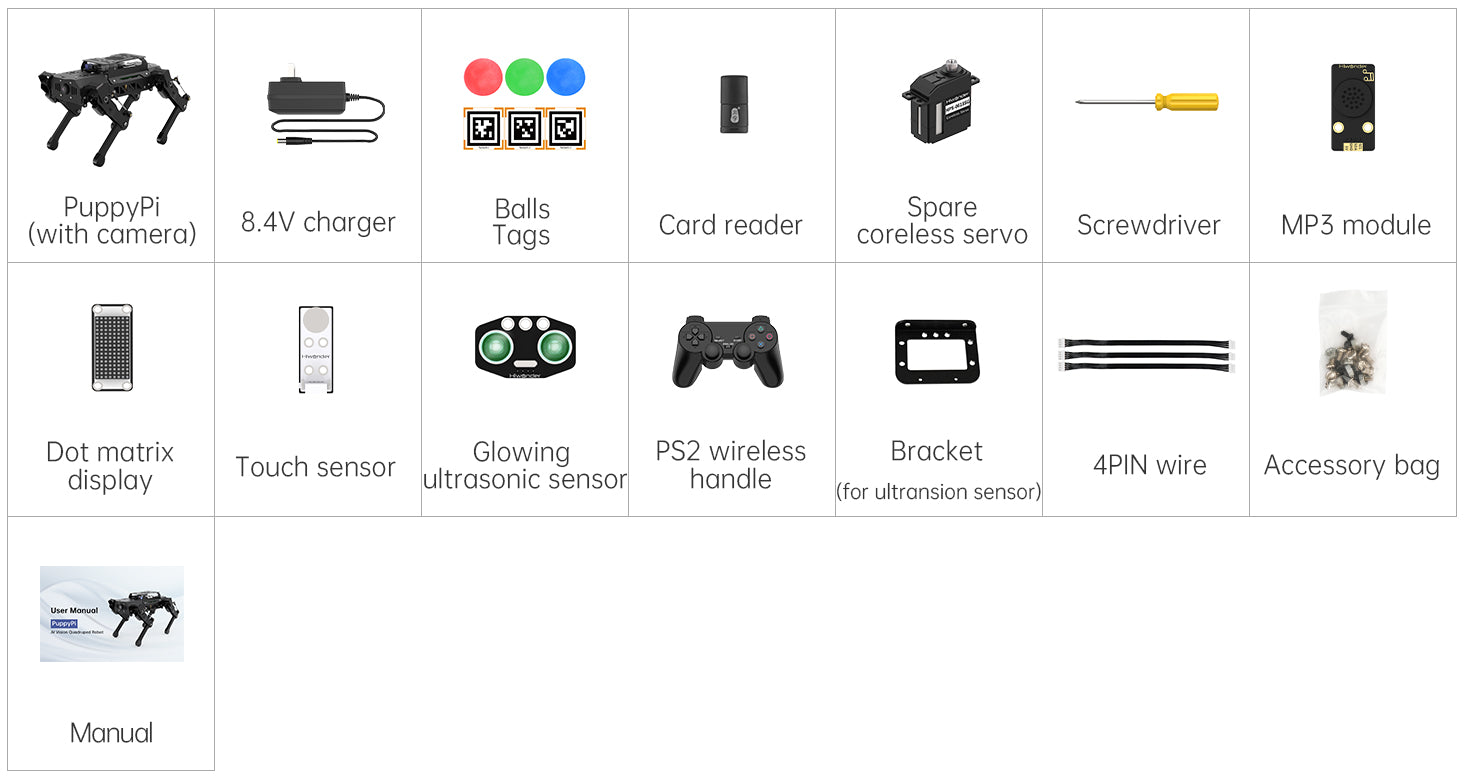
PuppyPi Standard Packing List

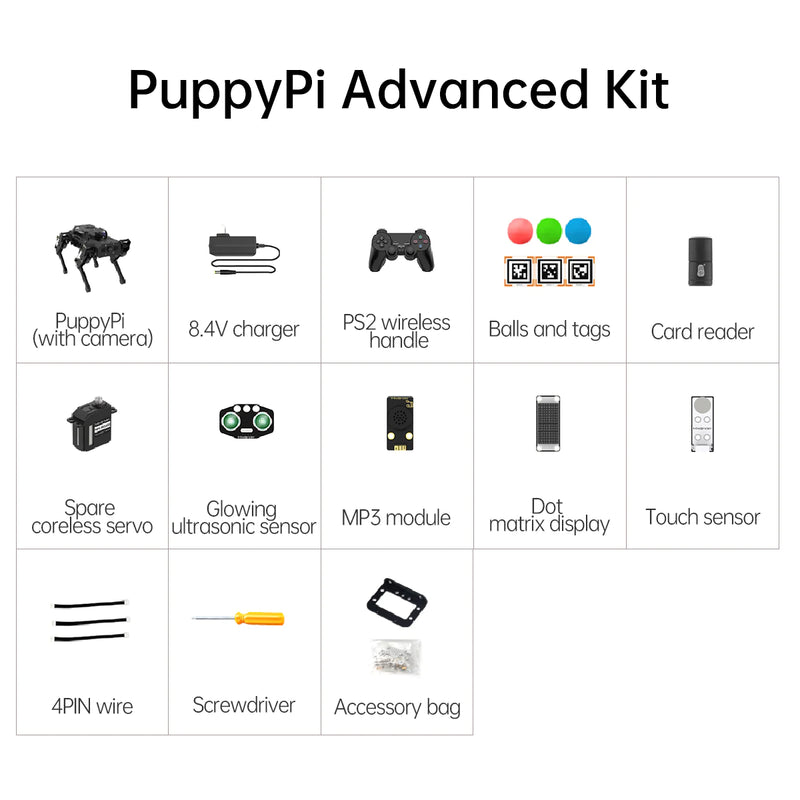
PuppyPi Advanced Packing List
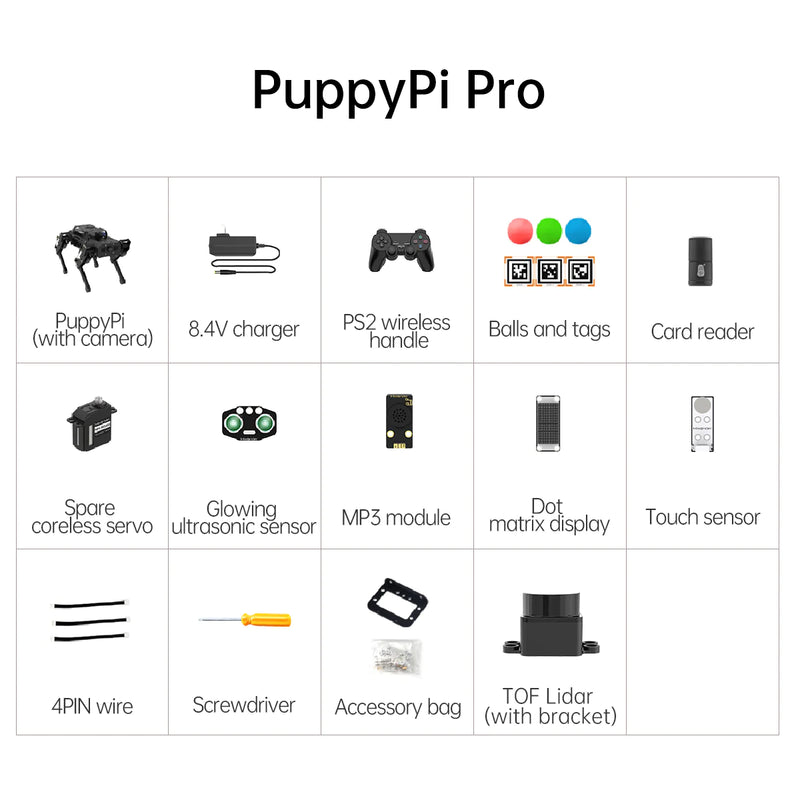
PuppyPi Pro Packing List
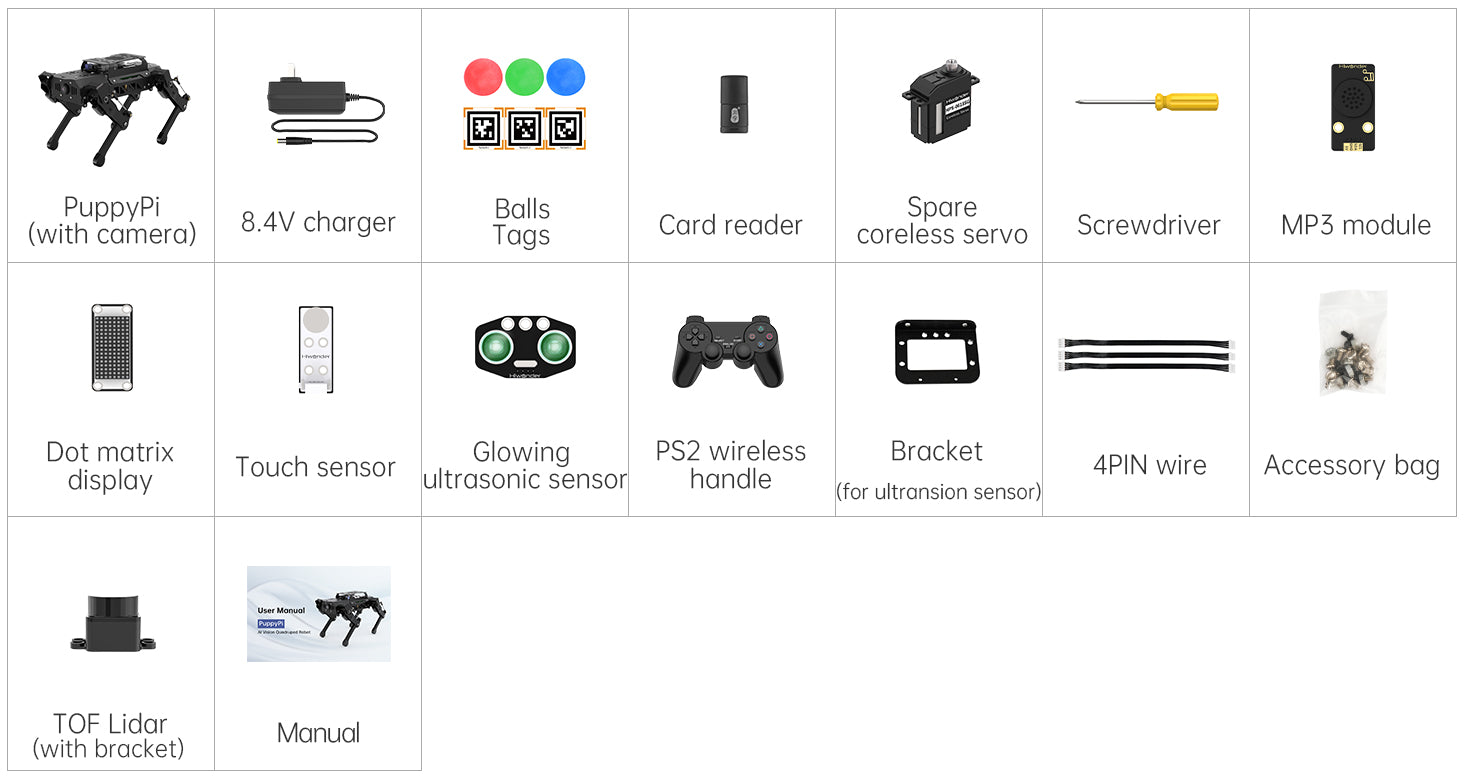
PuppyPi Pro Ultimate Packing List

Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.