






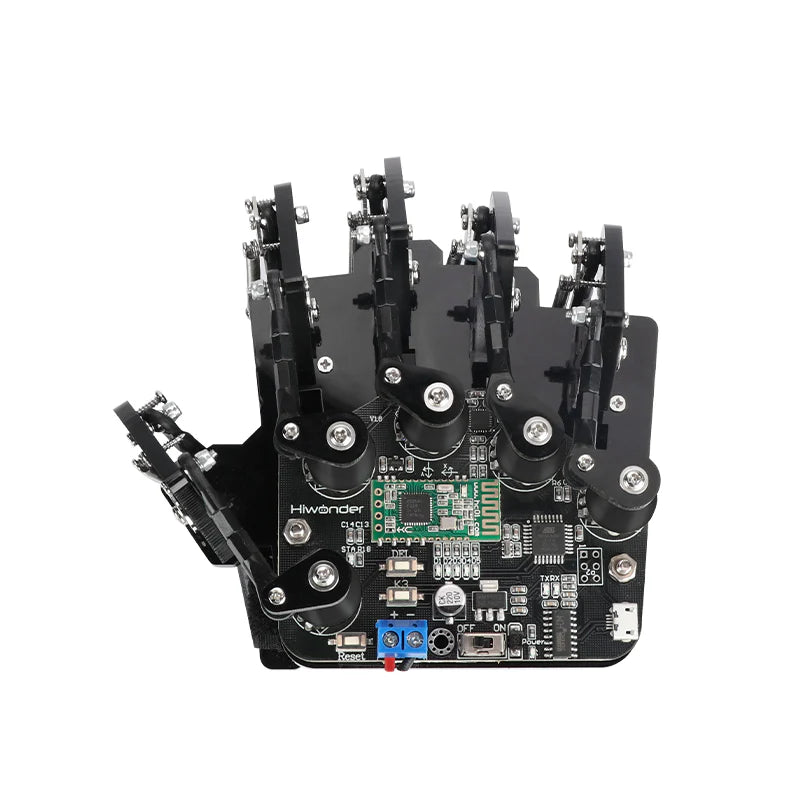

Hiwonder Wireless Glove Open-source Somatosensory Mechanical Glove for Robot Control
The wearable Hiwonder Wireless Glove is designed to control bionic robots, seamlessly compatible with the Arduino development environment. This glove features a Bluetooth module, an accelerometer gyroscope sensor, LEDs, and other electronic components, functioning as the remote transmitter for robot manipulation, revolutionizing the scope of robot applications. Fully open source, it encourages secondary development. To expedite project development and support a range of robot endeavors, we offer schematic diagrams, source code, and a diverse selection of robot control routines.

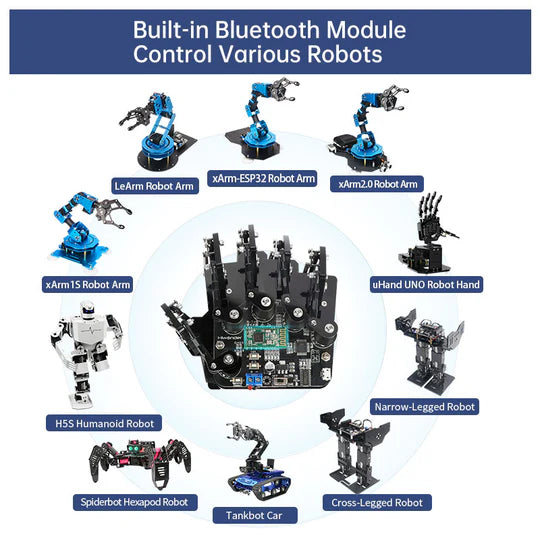
 Built-in Bluetooth Module, Control If you intend to utilize the wireless glove to control robots not manufactured by Hiwonder, please ensure that the Bluetooth modules installed in those robots are either DX-BT24 or HC-08 models. |
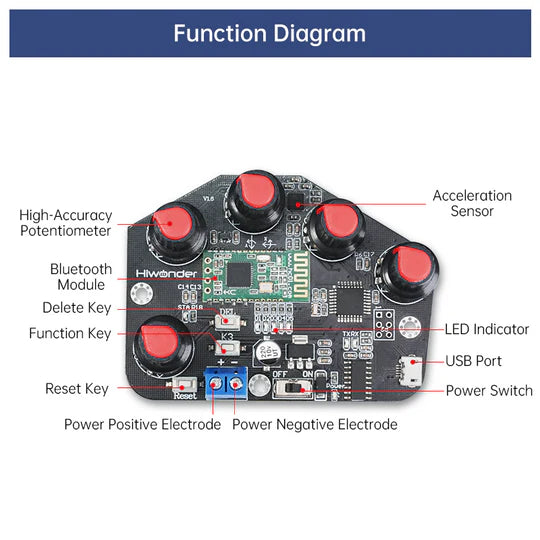
 Built-in Acceleration Sensor and The wireless glove incorporates 5 encoders and 1 accelerometer sensor. Through programming, you can customize the combination of these components to exert precise control over the robot by transmitting data via the Bluetooth module. |
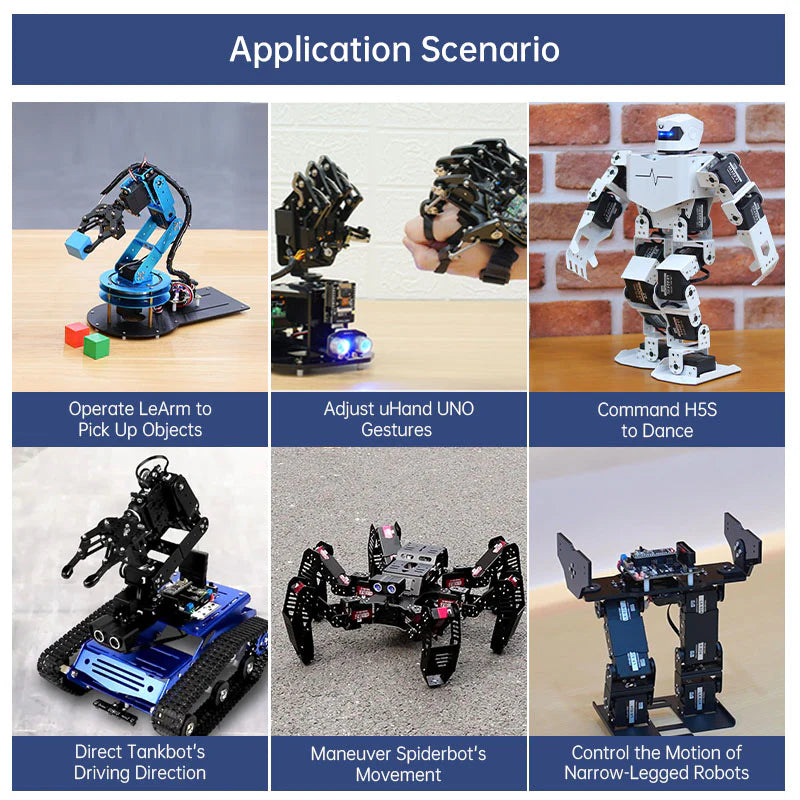
Application Scenario

Function Diagram

Specifications
| Item | Specification |
|---|---|
| Wireless Glove | Size: 118*110mm. Weight: 220g. Microcontroller chip: ATmega328p. Battery: 7.4V LiPo battery. |
| Bluetooth Module | Size: 34*28*10mm. Weight: 5g. Baud Rate: 9600. |
Wireless Glove Packing List

Video
Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.
