












Hiwonder JetArm ROS1/ROS2 3D Vision Robot Arm, with Multimodal AI Model (ChatGPT), AI Voice Interaction and Vision Recognition, Tracking & Sorting


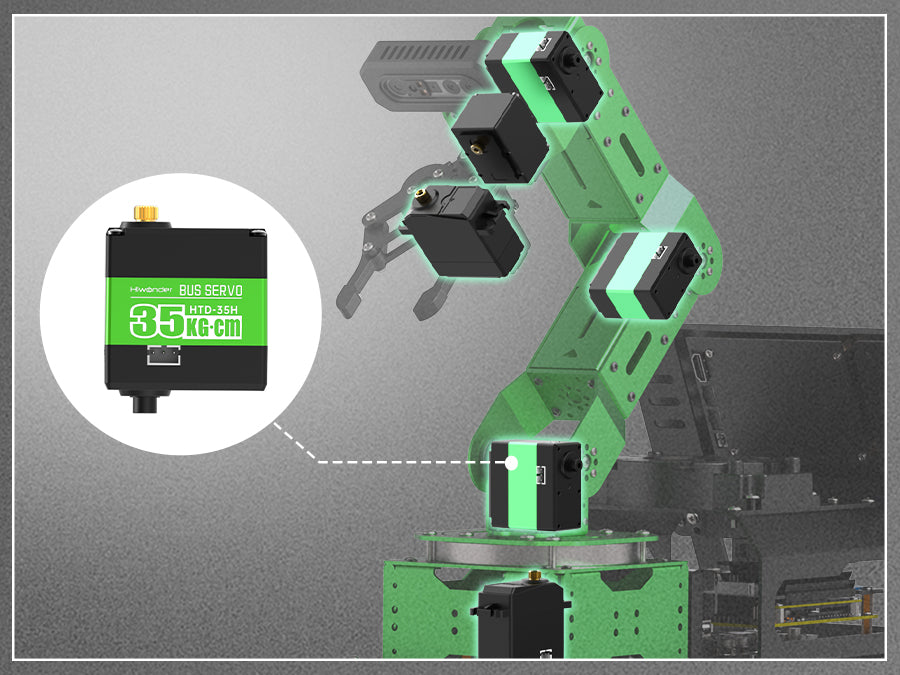
JetArm is a desktop-level AI vision robotic arm developed by Hiwonder for ROS education scenarios. Equipped with a 3D depth camera, JetArm seamlessly combines 3D vision with robotic arm control. Backed by high-performance components—including high-torque smart bus servos, an NVIDIA Jetson controller, and an integrated microphone array—the robotic arm is capable of recognizing, tracking, and grasping target objects in 3D space. JetArm also leverages a Multimodal AI Large Model to support more advanced embodied AI applications. To help you unlock its full potential, we offer comprehensive tutorials designed to inspire and support your AI-driven creative projects.
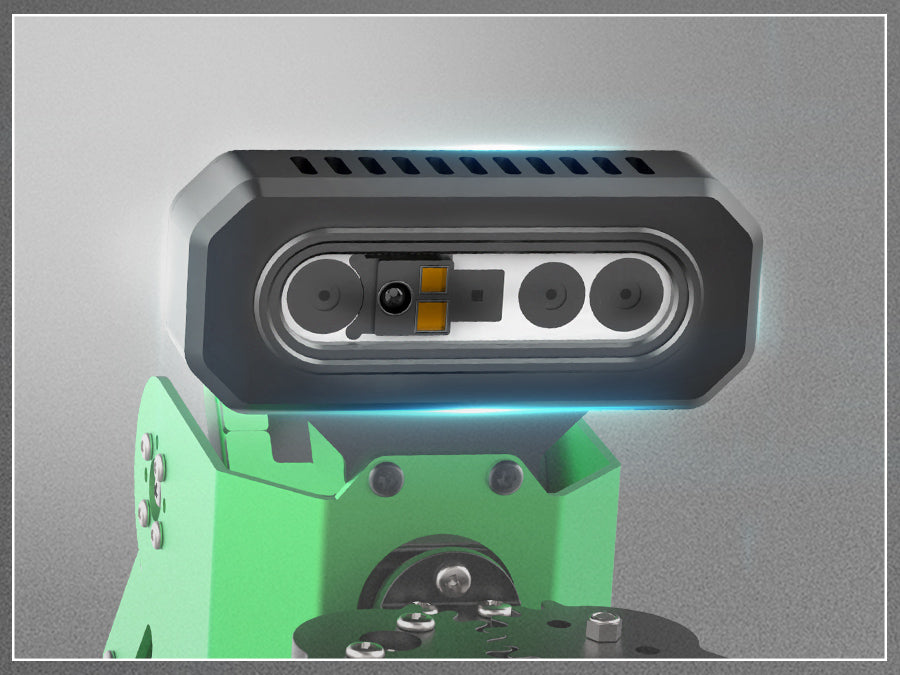
Depth Vision, 3D Scene Flexible GrabbingThe end of the JetArm robot arm is equipped with a high-performance 3D depth camera, which can realize target recognition, tracking and grabbing. Through RGB+D fusion detection, JetArm can also realize flexible grabbing in 3D scene. |
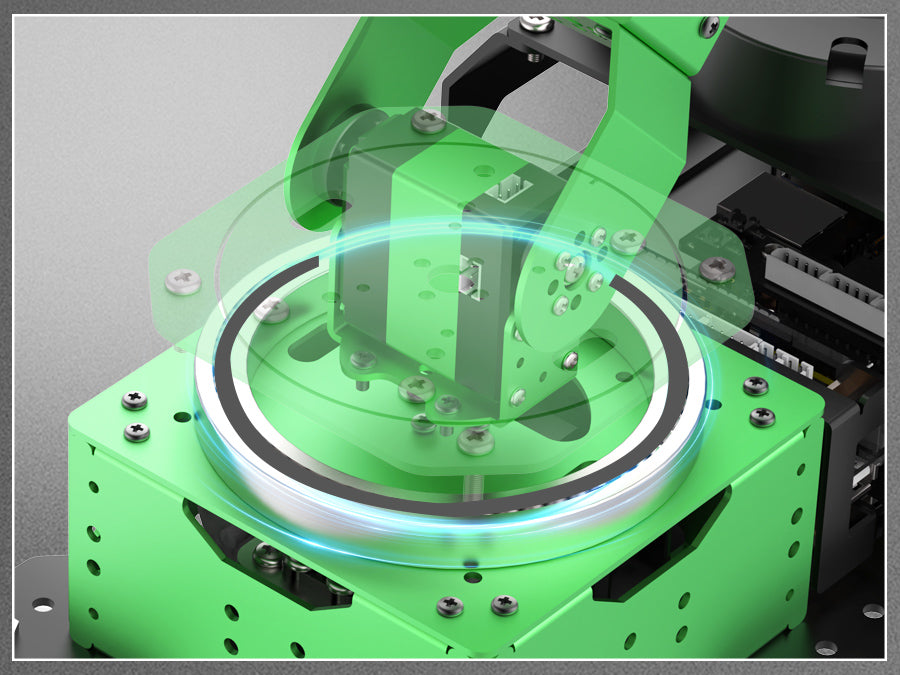
All-metal Structure, Bearing BaseThe body of the robot arm adopts an all-metal structure, and the surface is anodized, making it exquisite and beautiful. The base uses industrial-grade bearings to meet high-demand grabbing projects. |
Wrapped Structure Design, Beautiful WiringJetArm adopts a wrapped structure design, and the wiring of the servo can be hidden inside the fuselage, making the outside of the fuselage clean and tidy. |
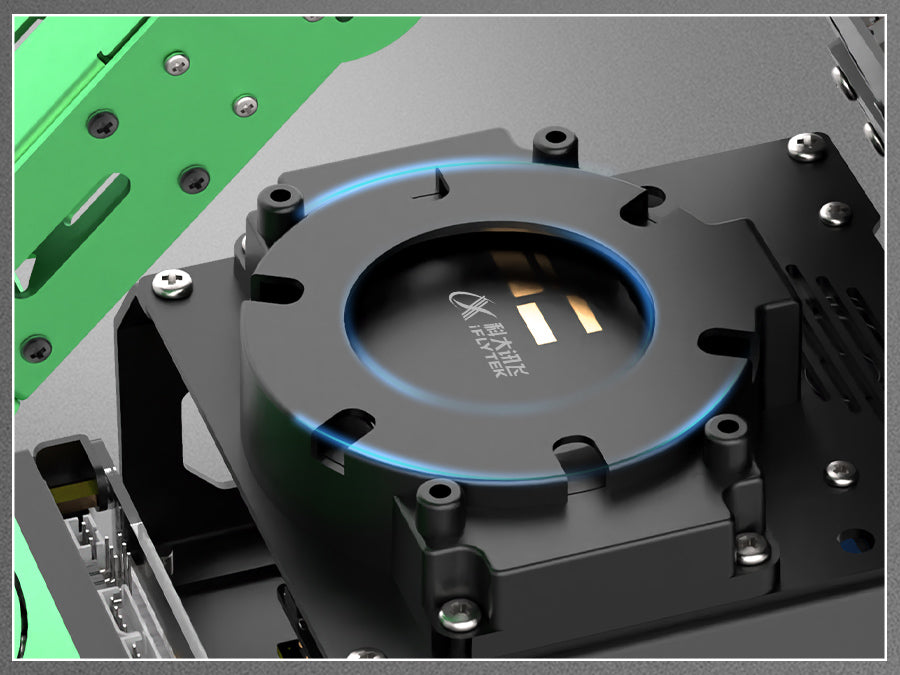 Circular Microphone ArrayJetArm comes with a circular 6-microphone array that delivers excellent noise reduction and clear audio capture. It supports advanced features such as sound source localization, speech recognition, voice announcements, and voice control.JetArm comes with a circular 6-microphone array that delivers excellent noise reduction and clear audio capture. It supports advanced features such as sound source localization, speech recognition, voice announcements, and voice control. |
Dual-Controller Design for Efficient Collaboration


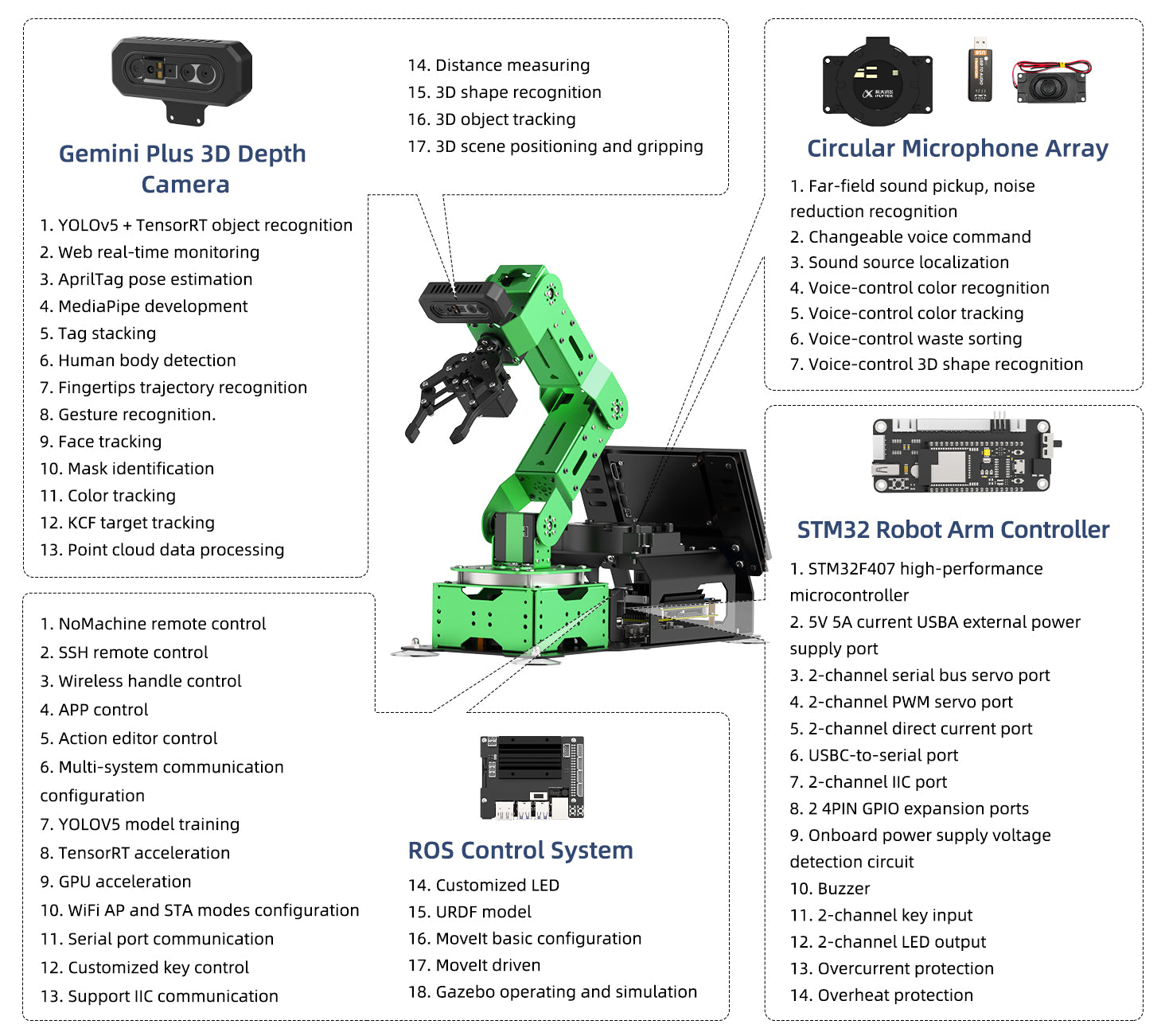
Function List
Multimodal Models Deployment
JetArm integrates a Multimodal Large AI Model and supports online deployment via OpenAI's API, enabling real-time access to advanced AI capabilities. It also allows seamless switching to alternative models, such as those available through OpenRouter, to support Vision Language Model applications. At its core, JetArm is designed as an all-in-one interaction hub built around ChatGPT, enabling sophisticated embodied AI use cases and creating a smooth, intuitive human-machine interaction experience!



Large AI Model–Driven Embodied AI Applications
JetArm Ultimate Kit is equipped with a circular 6-microphone array. Going beyond the one-way command-response pattern of traditional AI models, JetArm—powered by ChatGPT—enables a cognitive leap from semantic understanding to physical execution, significantly enhancing the naturalness and fluidity of human-machine interaction. Combined with advanced machine vision, JetArm delivers outstanding capabilities in perception, reasoning, and action, making it ideal for developing sophisticated embodied AI applications.
 Voice ControlWith ChatGPT integration, JetArm can comprehend spoken commands and carry out corresponding actions, enabling intuitive and seamless voice-controlled interaction. |
 Color SortingWith the support of ChatGPT, JetArm can understand user commands and, when combined with AI vision, accurately identify and sort objects based on their colors within its field of view. |
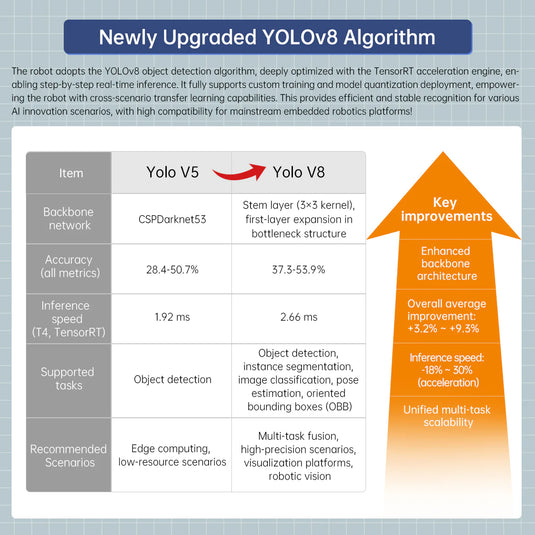
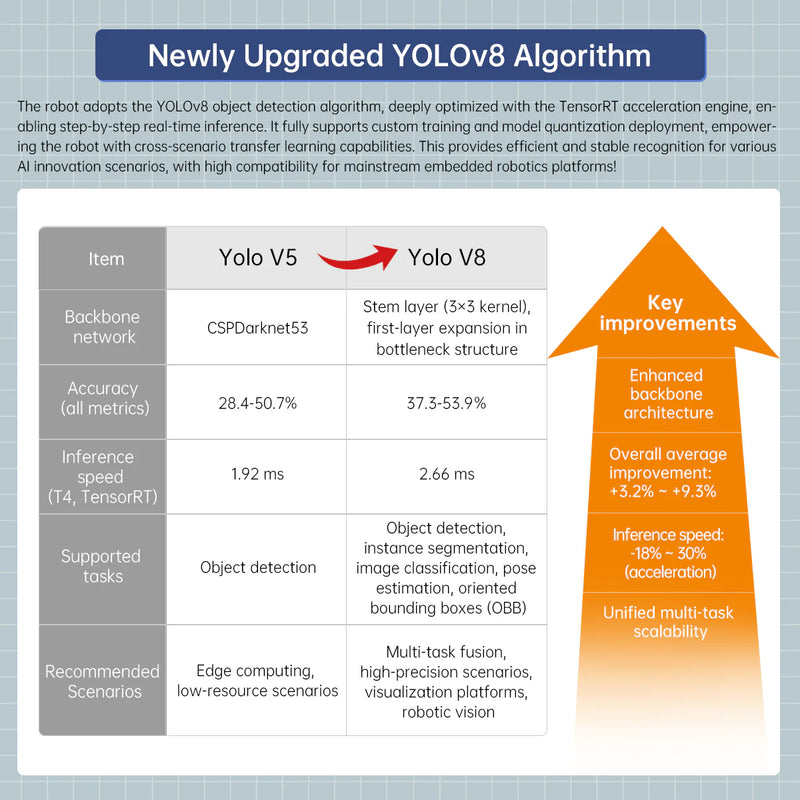
 Waste SortingJetArm leverages the YOLOv8 deep learning model built into its system to recognize different types of objects in the scene. With the power of ChatGPT, it can interpret user commands and perform corresponding actions, such as waste sorting. |
 3D Object SortingEquipped with a 3D depth camera, JetArm can detect objects of various shapes within its field of view. When combined with ChatGPT, it understands user instructions and carries out the required actions. |





Deep Learning Model Training
JetArm integrates advanced neural network technologies, leveraging YOLOv8 for real-time multi-object detection. It enables customized deep learning model training for specific objects, producing lightweight models optimized for TensorRT acceleration, unlocking a wide range of AI-driven creative possibilities.
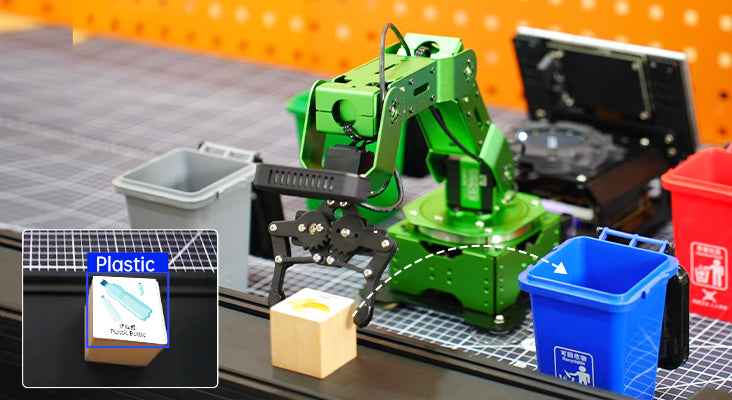
Waste SortingJetArm's kit is equipped with garbage pattern blocks. By loading the corresponding model, JetArm can quickly recognize different garbage and place it in the corresponding classification area. |

Item SortingBy training models of daily items and generating correspond-ing models, with the support of depth cameras, JetArm can quickly recognize and grab corresponding items by obtaining the depth information of the items. |

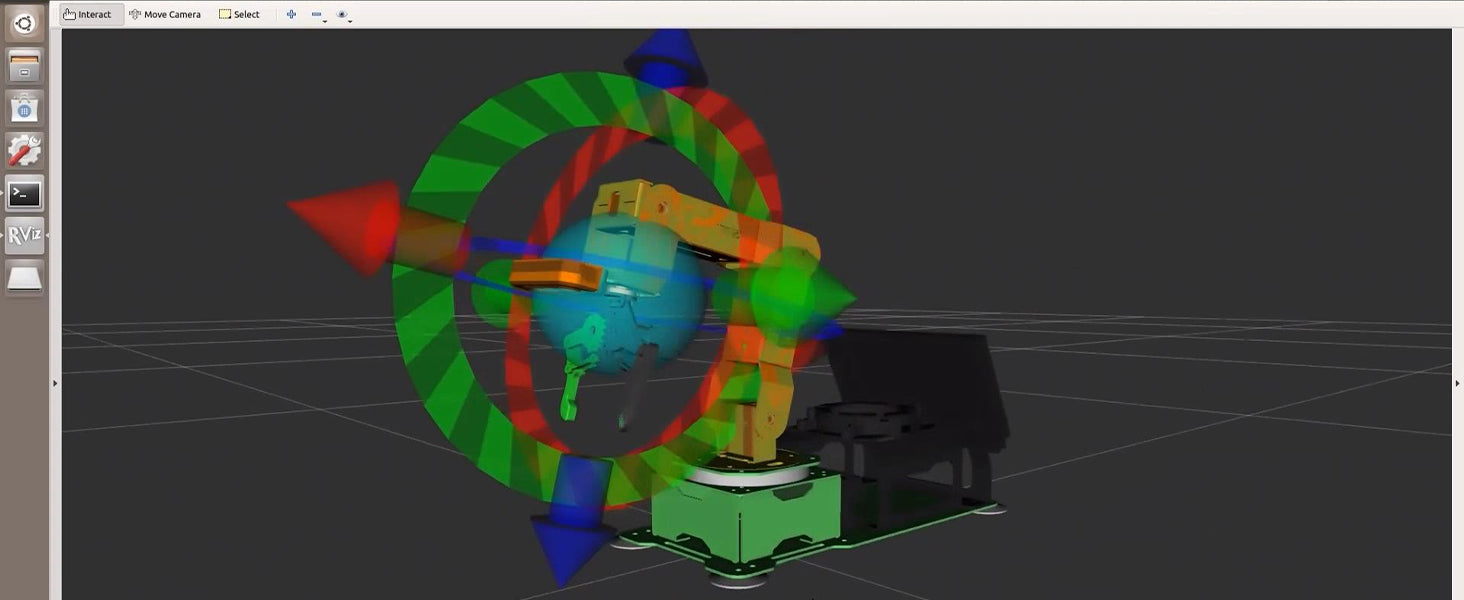
Gazebo Simulation
The JetArm robotic arm is developed using the ROS framework and supports GAZEBO simulation. The robotic arm is controlled and algorithm verified in a virtual environment, which reduces the requirements for the experimental environment and improves experimental efficiency.

JetArm Configuration Selection Guide
The Jetson Nano provides essential AI inference capabilities, perfect for simple neural networks and deep learning models, making it ideal for entry-level AI applications. The Jetson Orin Nano offers 80 times the performance and computing power of the Jetson Nano, supporting more complex deep learning models and accelerated inference, making it well-suited for advanced edge AI applications. The Jetson Orin NX boosts computing power 2.5 times over the Jetson Orin Nano, offering top-tier AI inference performance for larger neural networks and real-time deep learning tasks. This performance upgrade enhances JetArm, unlocking exceptional capabilities in servo control, vision tasks, and deep learning across a wide range of applications!





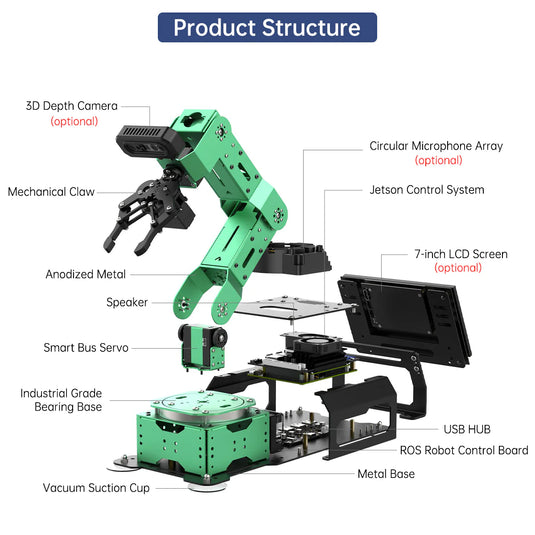
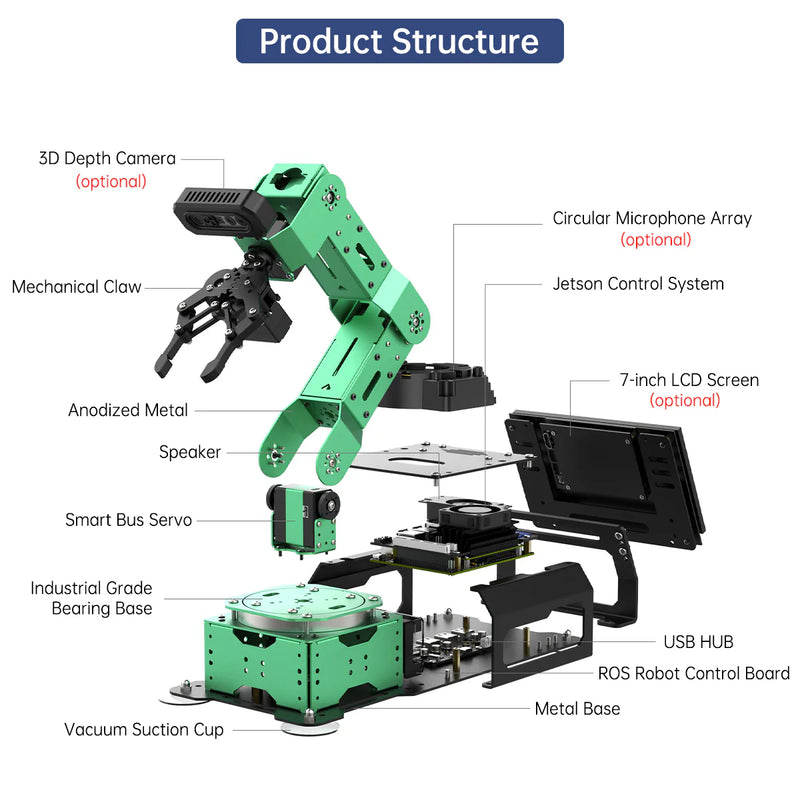
Product Structure









7-inch HD LCD Touch ScreenThe tail of the JetArm supports a 7-inch touch screen, which allows you to view the first vision image of the robotic arm in real time, as well as the operating status of the JetArm in real time to facilitate timely debugging. |

Anodized Metal BracketThe JetArm robotic arm adopts an all-metal structure and anodized metal brackets, which are exquisite in workmanship, beautiful and durable. |
Built-in Invisible AntennaThe JetArm robotic arm uses a hidden antenna designed to enhance the signal and is built into the control cabin, giving the robotic arm a neat and clean appearance and eliminating the risk of interference with the antenna when the robotic arm is moving. |
 Versatile Expansion PortsJetArm's base board provides abundant expansion ports, offering seamless compatibility with Hiwonder's sliding rail and mecanum wheel chassis—enabling a wide range of creative and advanced expansion possibilities. |

SPECIFICATIONS
| Item | Specification |
|---|---|
| Product model | JetArm |
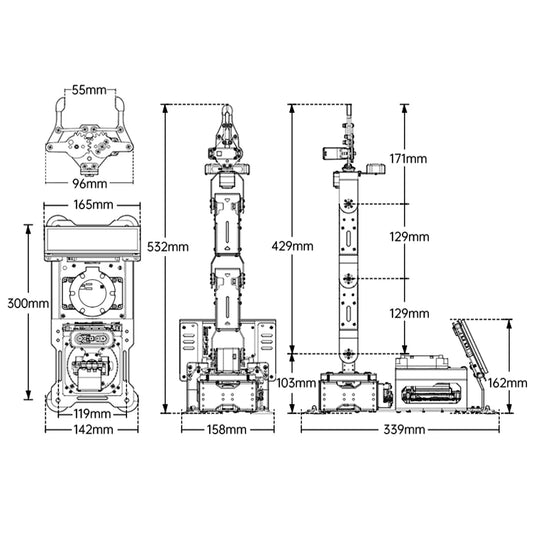
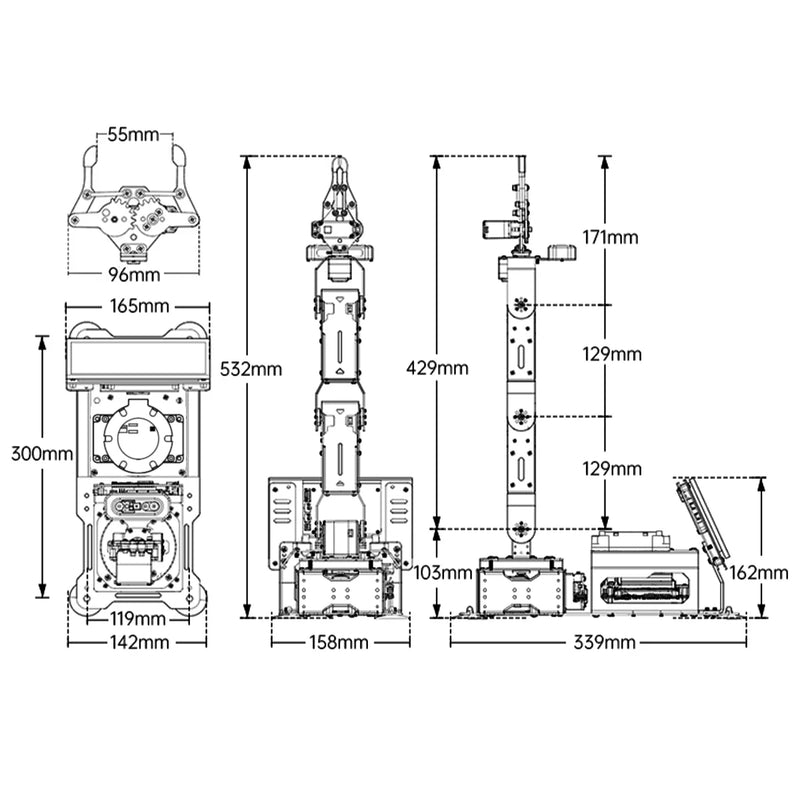
| Product dimensions | 339 × 165 × 532 mm |
| Product weight | Approx. 2.4 kg (ultimate version) |
| Body material | Full-metal aluminum alloy frame, anodized surface treatment |
| STM32 controller | ROS robot controller (STM32F407VE16), embedded with FreeRTOS real-time OS |
| ROS controller | Jetson Nano / Jetson Orin Nano / Jetson Orin NX |
| Control methods | USB serial port, CAN interface, Bluetooth app, RC transmitter, computer |
| USB expansion | 5A high-current USB HUB expansion board |
| Camera | Gemini Plus depth camera |
| Power supply | 12V 5A DC power adapter / 19V 2.37A power adapter |
| Operating system | Ubuntu 20.04 LTS + ROS Noetic / Ubuntu 18.04 LTS + ROS Melodic |
| Software | iOS/Android app |
| Communication | USB / Wi-Fi / Ethernet |
| Programming language | Python / C / C++ / JavaScript |
| Storage | 32GB TF card (Jetson Nano) / 128GB SSD (Jetson Orin Nano/NX) |
| Servo model | HTS-21H / HTD-35H / HX-12H smart bus servo motors |
| Optional accessories | Integrated 6-microphone array, and 7-inch HD touchscreen |
| Supporting materials | Full development manuals, video tutorials, ROS/STM32 source code, system images, software tools |
| Package weight & volume | 4 kg; 385 × 295 × 175 mm |
JetArm Starter Packing List

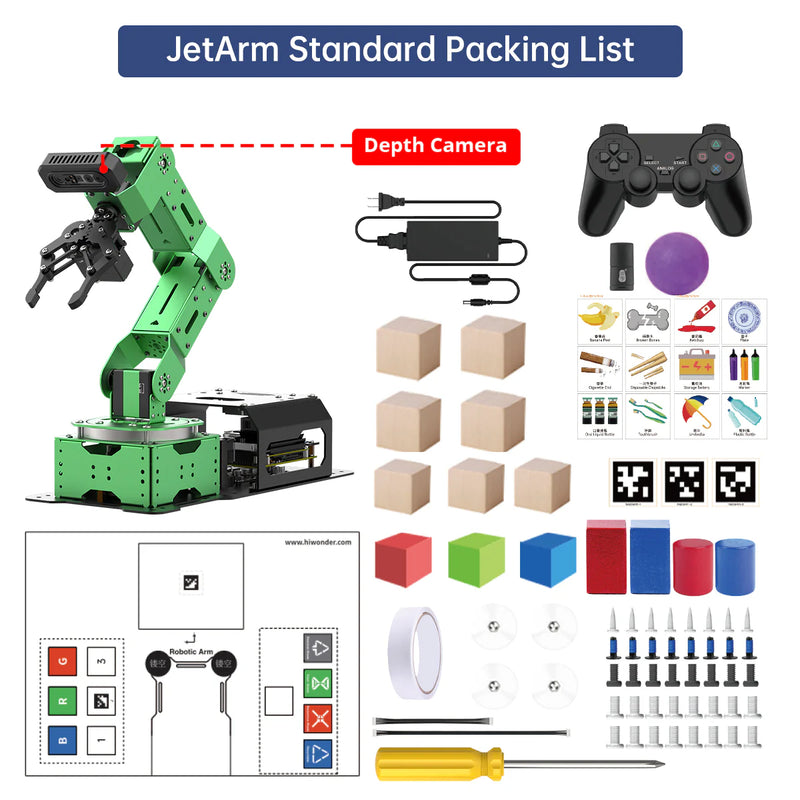
JetArm Standard Packing List

JetArm Advanced Packing List

JetArm Ultimate Packing List

VIDEO
Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.
