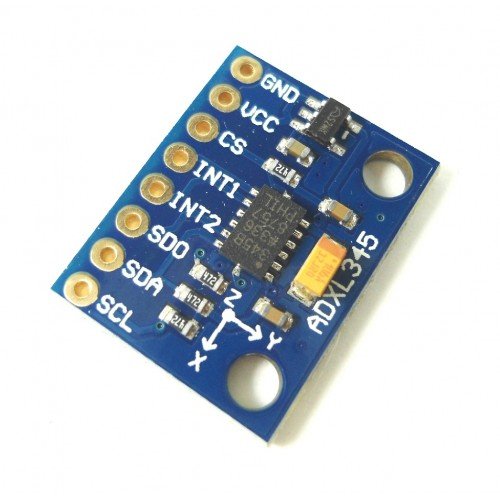
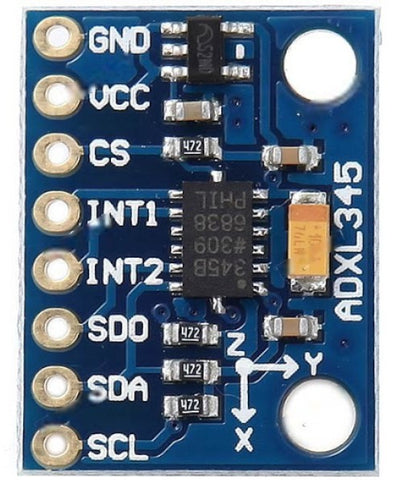
The ADXL345 is a low-power, 3-axis MEMS accelerometer modules with both I2C and SPI interfaces. The Adafruit Breakout boards for these modules feature on-board 3.3v voltage regulation and level shifting which makes them simple to interface with 5v microcontrollers such as the Arduino.
The ADXL345 features 4 sensitivity ranges from +/- 2G to +/- 16G. And it supports output data rates ranging from 10Hz to 3200Hz.
ADXL345 digital three-axis acceleration gravity tilt module code Ar iic / spi.
Name: module ADXL345 (acceleration of gravity of three axes).
Power supply: 3-5 v.
Communication media: the iic / spi communication protocol.
Measuring range: 2g 16g.
51, the avr, the test code of the microcontroller Ar.
Please note that although my status in your website shows fulfilled, my components haven't arrived yet. I am extremely disappointed by the poor coordination between your team and the delivery team.
Three of the four ports stopped working after usage for sometime. After more usage using the fourth port only, the fourth port also stopped working in 3 days. Very bad experience. Please return or replace.
{"id":1662949916744,"title":"ADXL345 Accelerometer Module","handle":"adxl345-accelerometer-module","description":"\u003cp\u003e\u003cspan\u003eThe ADXL345 is a low-power, 3-axis MEMS accelerometer modules with both I2C and SPI interfaces. The Adafruit Breakout boards for these modules feature on-board 3.3v voltage regulation and level shifting which makes them simple to interface with 5v microcontrollers such as the Arduino.\u003c\/span\u003e\u003cbr\u003e\u003cbr\u003e\u003cspan\u003eThe ADXL345 features 4 sensitivity ranges from +\/- 2G to +\/- 16G. And it supports output data rates ranging from 10Hz to 3200Hz.\u003c\/span\u003e\u003c\/p\u003e\n\u003cul\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eADXL345 digital three-axis acceleration gravity tilt module code Ar iic \/ spi. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eName: module ADXL345 (acceleration of gravity of three axes). \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003ePower supply: 3-5 v. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eCommunication media: the iic \/ spi communication protocol. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eMeasuring range: 2g 16g. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003e51, the avr, the test code of the microcontroller Ar. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e3-axis ± 2g \/ ± 4g \/ ± 8g \/ ± 16g\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003ch5\u003eSpecifications\u003c\/h5\u003e\n\u003cdiv\u003e\u003cimg style=\"display: block; margin-left: auto; margin-right: auto;\" alt=\"\" src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/Annotation_2020-04-10_170316_480x480.jpg?v=1586518450\"\u003e\u003c\/div\u003e\n\u003cdiv\u003e\u003cimg alt=\"\" src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/main-qimg-6768e3c77b5020367ec6408255082848_480x480.gif?v=1592344160\"\u003e\u003c\/div\u003e\n\u003cul\u003e\u003c\/ul\u003e\n\u003ch5\u003eResources\u003c\/h5\u003e\n\u003ca href=\"https:\/\/github.com\/thinkrobotics\/DATASHEET\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC1027\" target=\"_blank\"\u003eDatasheets\u003c\/a\u003e\u003cbr\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/LIBRARIES\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC1027\" target=\"_blank\"\u003eLibraries\u003c\/a\u003e \u003cbr\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/SAMPLE_CODE\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC1027\" target=\"_blank\"\u003eSample Code\u003c\/a\u003e\n\u003ch5\u003eTutorials\u003c\/h5\u003e\n\u003ciframe src=\"https:\/\/www.youtube.com\/embed\/KMhbV1p3MWk\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e \u003ciframe src=\"https:\/\/www.youtube.com\/embed\/HM_Vj8weu4I\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e","published_at":"2022-12-06T11:22:42+05:30","created_at":"2019-03-11T10:43:59+05:30","vendor":"ThinkRobotics","type":"Sensor","tags":["Acceleration","Accelerometer","Accelerometer module","ADXL345","ELC1","IMU-BRD","triple-axis accelerometer","ZOHO UPDATED"],"price":17999,"price_min":17999,"price_max":17999,"available":false,"price_varies":false,"compare_at_price":29999,"compare_at_price_min":29999,"compare_at_price_max":29999,"compare_at_price_varies":false,"variants":[{"id":27846958415944,"title":"Without Soldered Pin","option1":"Without Soldered Pin","option2":null,"option3":null,"sku":"ELC1027","requires_shipping":true,"taxable":true,"featured_image":{"id":29340084895830,"product_id":1662949916744,"position":1,"created_at":"2021-12-22T16:29:37+05:30","updated_at":"2021-12-22T16:29:38+05:30","alt":null,"width":500,"height":500,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/adxl345-3-asiu-skaitmeninis-akselerometras-242-500x500.jpg?v=1640170778","variant_ids":[27846958415944]},"available":false,"name":"ADXL345 Accelerometer Module - Without Soldered Pin","public_title":"Without Soldered Pin","options":["Without Soldered Pin"],"price":17999,"weight":20,"compare_at_price":29999,"inventory_management":"shopify","barcode":"ELC1027","featured_media":{"alt":null,"id":21758124687446,"position":1,"preview_image":{"aspect_ratio":1.0,"height":500,"width":500,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/adxl345-3-asiu-skaitmeninis-akselerometras-242-500x500.jpg?v=1640170778"}},"requires_selling_plan":false,"selling_plan_allocations":[],"quantity_rule":{"min":1,"max":null,"increment":1}},{"id":16326328811592,"title":"With Soldered Pin","option1":"With Soldered Pin","option2":null,"option3":null,"sku":"ELC1027S","requires_shipping":true,"taxable":true,"featured_image":null,"available":false,"name":"ADXL345 Accelerometer Module - With Soldered Pin","public_title":"With Soldered Pin","options":["With Soldered Pin"],"price":17999,"weight":20,"compare_at_price":29999,"inventory_management":"shopify","barcode":"ELC1027S","requires_selling_plan":false,"selling_plan_allocations":[],"quantity_rule":{"min":1,"max":null,"increment":1}}],"images":["\/\/thinkrobotics.com\/cdn\/shop\/products\/adxl345-3-asiu-skaitmeninis-akselerometras-242-500x500.jpg?v=1640170778"],"featured_image":"\/\/thinkrobotics.com\/cdn\/shop\/products\/adxl345-3-asiu-skaitmeninis-akselerometras-242-500x500.jpg?v=1640170778","options":["Soldered"],"media":[{"alt":null,"id":21758124687446,"position":1,"preview_image":{"aspect_ratio":1.0,"height":500,"width":500,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/adxl345-3-asiu-skaitmeninis-akselerometras-242-500x500.jpg?v=1640170778"},"aspect_ratio":1.0,"height":500,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/adxl345-3-asiu-skaitmeninis-akselerometras-242-500x500.jpg?v=1640170778","width":500}],"requires_selling_plan":false,"selling_plan_groups":[],"content":"\u003cp\u003e\u003cspan\u003eThe ADXL345 is a low-power, 3-axis MEMS accelerometer modules with both I2C and SPI interfaces. The Adafruit Breakout boards for these modules feature on-board 3.3v voltage regulation and level shifting which makes them simple to interface with 5v microcontrollers such as the Arduino.\u003c\/span\u003e\u003cbr\u003e\u003cbr\u003e\u003cspan\u003eThe ADXL345 features 4 sensitivity ranges from +\/- 2G to +\/- 16G. And it supports output data rates ranging from 10Hz to 3200Hz.\u003c\/span\u003e\u003c\/p\u003e\n\u003cul\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eADXL345 digital three-axis acceleration gravity tilt module code Ar iic \/ spi. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eName: module ADXL345 (acceleration of gravity of three axes). \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003ePower supply: 3-5 v. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eCommunication media: the iic \/ spi communication protocol. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003eMeasuring range: 2g 16g. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e\u003cspan\u003e\u003cspan\u003e51, the avr, the test code of the microcontroller Ar. \u003c\/span\u003e\u003c\/span\u003e\u003c\/li\u003e\n\u003cli\u003e3-axis ± 2g \/ ± 4g \/ ± 8g \/ ± 16g\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003ch5\u003eSpecifications\u003c\/h5\u003e\n\u003cdiv\u003e\u003cimg style=\"display: block; margin-left: auto; margin-right: auto;\" alt=\"\" src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/Annotation_2020-04-10_170316_480x480.jpg?v=1586518450\"\u003e\u003c\/div\u003e\n\u003cdiv\u003e\u003cimg alt=\"\" src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/main-qimg-6768e3c77b5020367ec6408255082848_480x480.gif?v=1592344160\"\u003e\u003c\/div\u003e\n\u003cul\u003e\u003c\/ul\u003e\n\u003ch5\u003eResources\u003c\/h5\u003e\n\u003ca href=\"https:\/\/github.com\/thinkrobotics\/DATASHEET\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC1027\" target=\"_blank\"\u003eDatasheets\u003c\/a\u003e\u003cbr\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/LIBRARIES\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC1027\" target=\"_blank\"\u003eLibraries\u003c\/a\u003e \u003cbr\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/SAMPLE_CODE\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC1027\" target=\"_blank\"\u003eSample Code\u003c\/a\u003e\n\u003ch5\u003eTutorials\u003c\/h5\u003e\n\u003ciframe src=\"https:\/\/www.youtube.com\/embed\/KMhbV1p3MWk\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e \u003ciframe src=\"https:\/\/www.youtube.com\/embed\/HM_Vj8weu4I\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e"}