Home
DIY Kits
Flexible And Expandable 6x4 Off-Road UGV, With Extension Rails and ESP32 Slave Computer, 6 wheels 4WD Mobile Robot Chassis
Features At A Glance
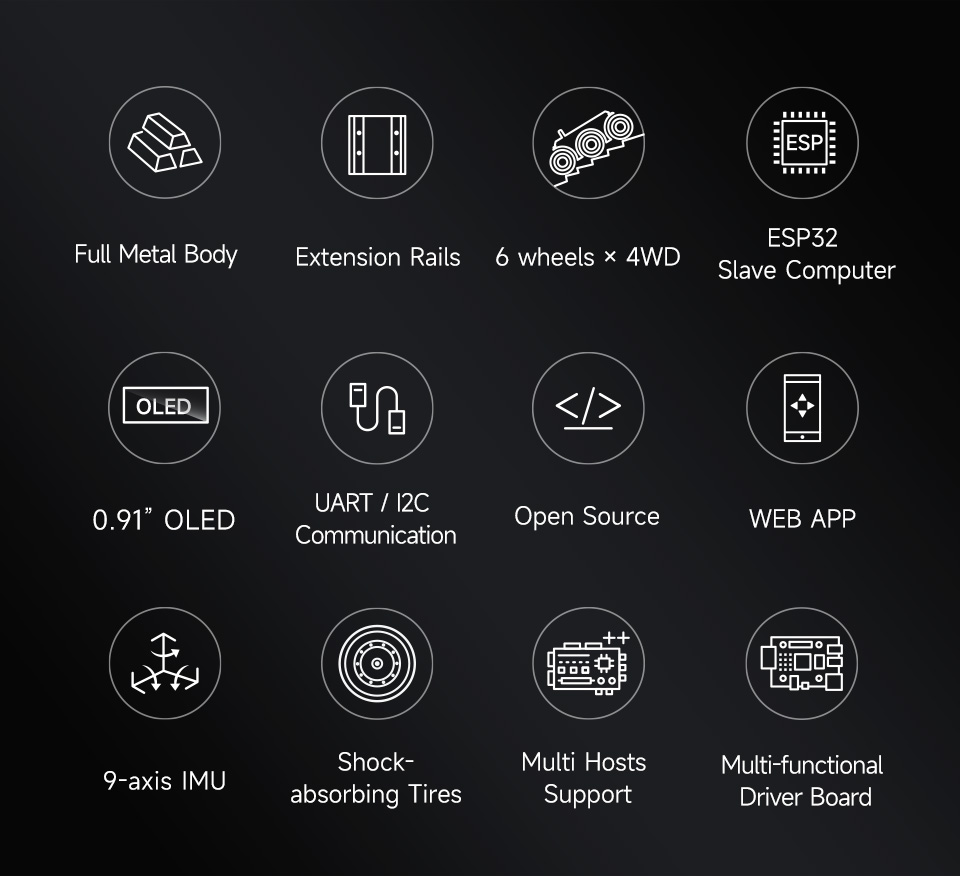
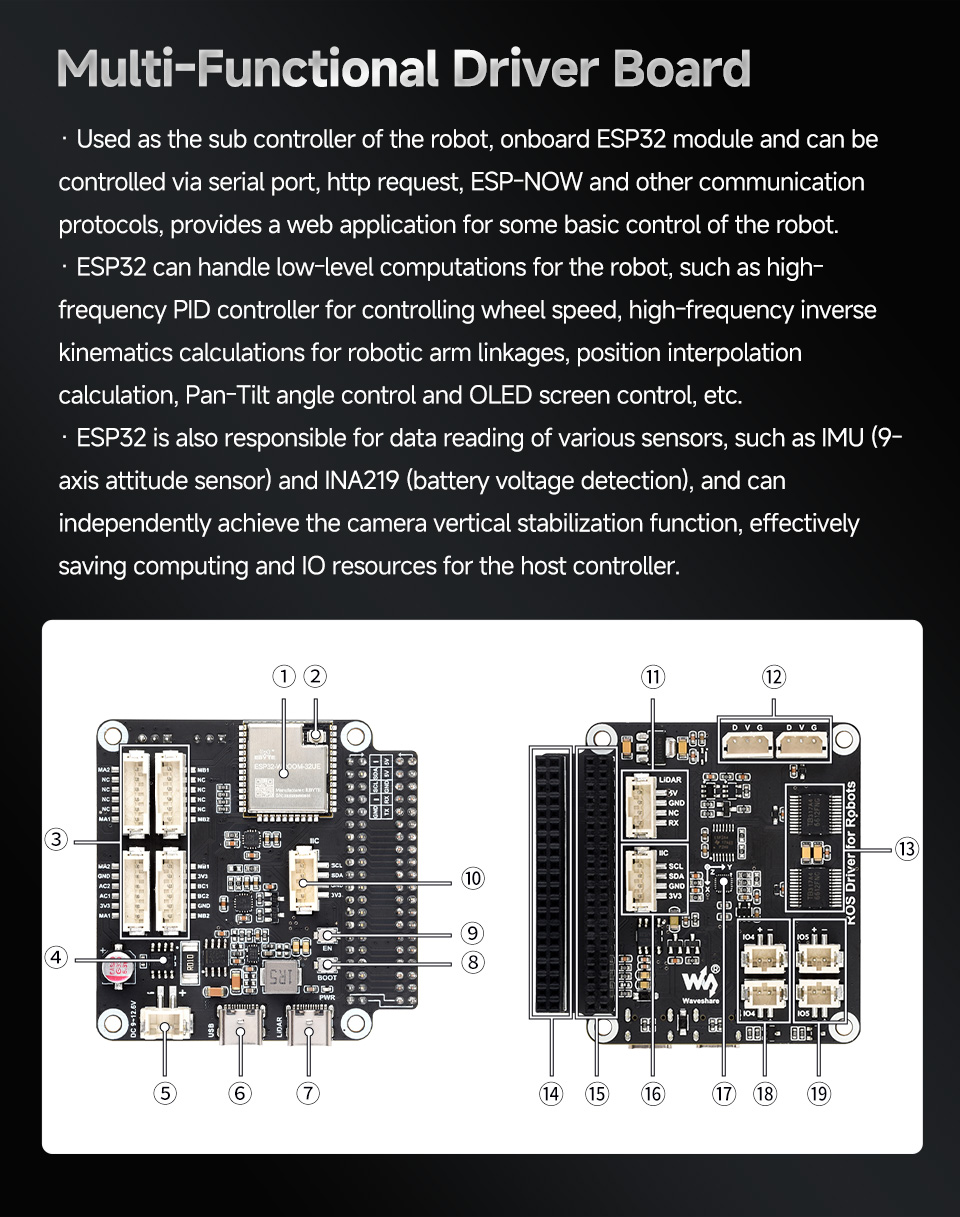
The UGV02 series is a 6 wheels × 4WD mobile robot chassis, which features superb off-road crossing ability and shock-absorbing performance, open source all code for secondary development. It supports multiple host computers (Raspberry Pi, Jetson Nano, Jetson Orin Nano, etc), the host computer can communicate with the ESP32 slave computer through the serial port. The design of 6 wheels × 4WD increases the contact area with the ground and load capacity, and provides strong power. Built in 3S UPS power supply module, supports 3 x 18650 Li batteries (in series, NOT included), which provides uninterruptible power for the robot and supports charging and power output at the same time. Built in multi-functional robot driver board, based on ESP32, with onboard WIFI and Bluetooth, for driving serial bus servos, outputting PWM signal, expanding TF card slot, etc.
The UGV02 adopts flexible rubber tires which greatly reduce the impact of complex terrains, can easily meet the needs of heavy loads, shock absorption, and off-road. Also, it comes with 2 x 1020 European standard profile rails, provides more possibilities for secondary development.
Specifications
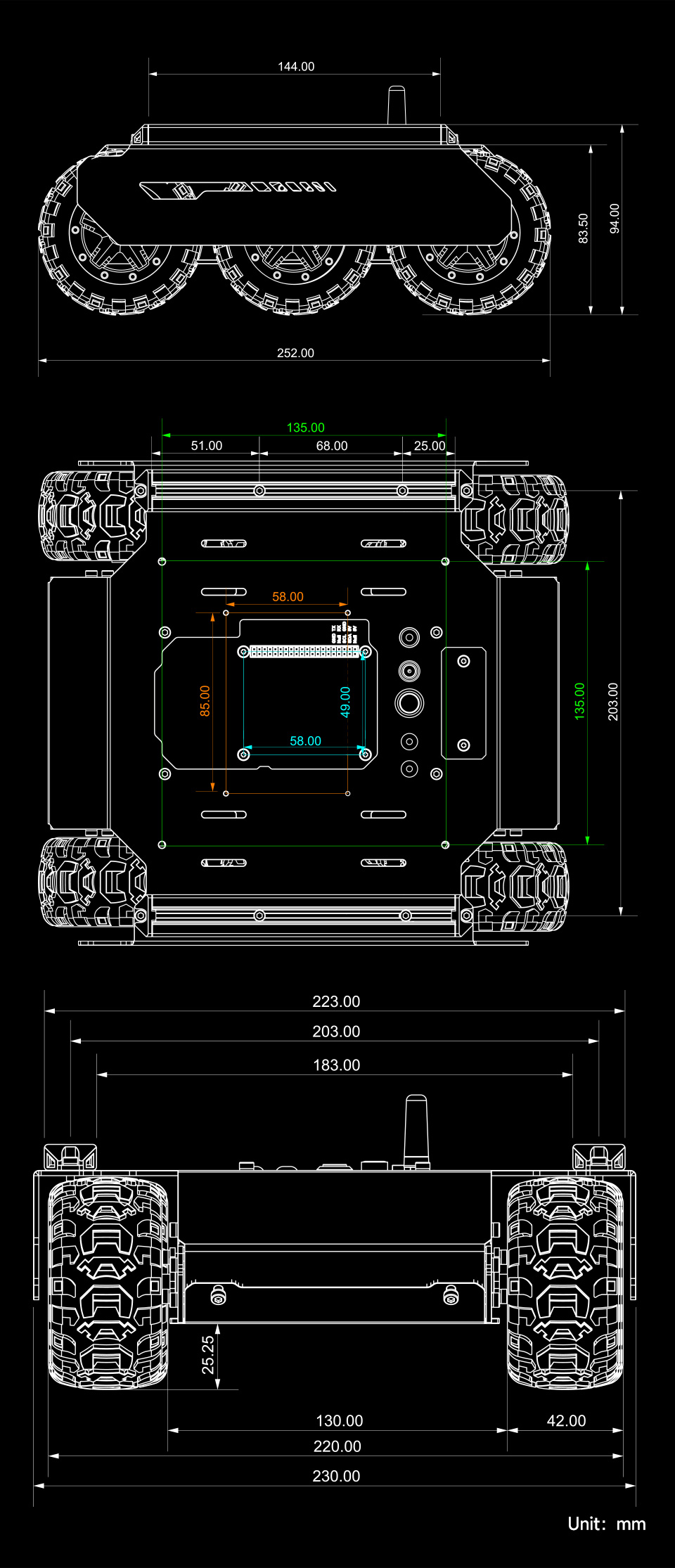
Outline dimensions 252×230×94mm
Tire material Nylon wheel hub, rubber tire
Chassis height 25mm
Rail Center distance 203mm
Tire width 42mm
Running speed 0.05~0.41m/s
Tire diameter 80mm
Number of driving wheels 4
Number of wheels 6
Body material 2mm (thickness) 5052 Aluminum Alloy
Weight 2kg
Vertical obstacle ability 40mm
Driving payload 4kg
Climbing ability 22°
Battery support 18650 Lithium battery × 3 (NOT Included)
Minimum turning radius 0m (In-situ Rotation)
Charging time 1.5h
Battery life 45min (full power continuous output)
Motor power 5W × 4
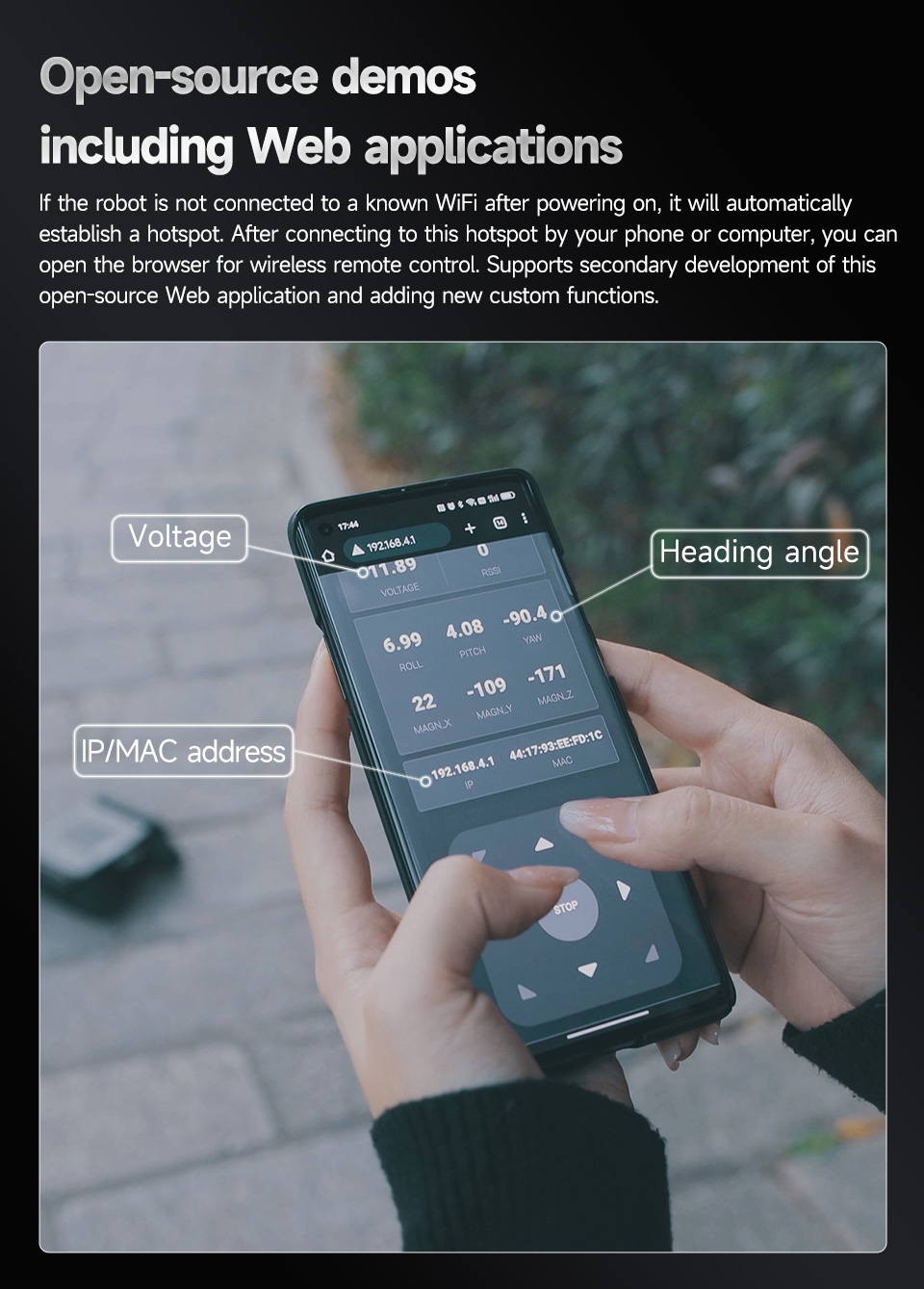
Remote control function WIFI AP/STA
Upper surface area 37864mm2
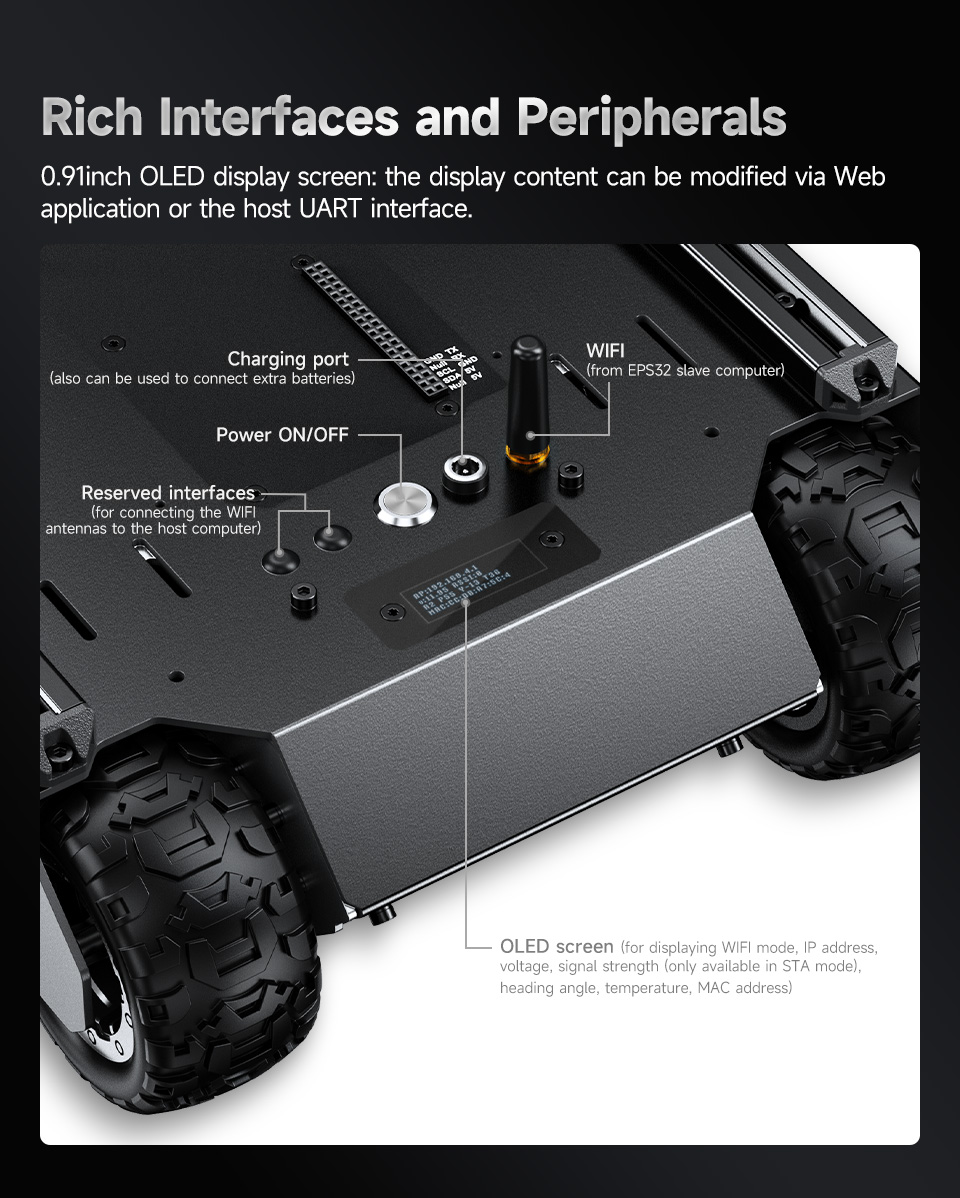
Communication interface UART / serial bus servo interface / I2C
Connect to Jetson Orin Nano
Connect to Raspberry Pi 4B
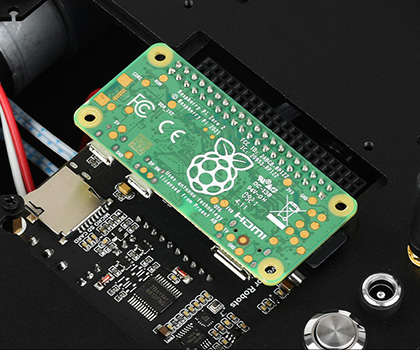
Connect to Raspberry Pi Zero
Dimensions
Resources & Services
Package Contents:
Weight: 3.402 kg
Use left/right arrows to navigate the slideshow or swipe left/right if using a mobile device
{"id":8630100492605,"title":"Flexible And Expandable 6x4 Off-Road UGV, With Extension Rails and ESP32 Slave Computer, 6 wheels 4WD Mobile Robot Chassis","handle":"flexible-and-expandable-6x4-off-road-ugv-with-extension-rails-and-esp32-slave-computer-6-wheels-4wd-mobile-robot-chassis","description":"\u003cdiv data-mce-fragment=\"1\" style=\"text-align: center;\"\u003e\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-1.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-3.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eFeatures At A Glance\u003c\/h2\u003e\n\u003cp data-mce-fragment=\"1\" class=\"alignl pdTRBL2\"\u003eThe \u003cstrong data-mce-fragment=\"1\"\u003eUGV02\u003c\/strong\u003e series is a 6 wheels × 4WD mobile robot chassis, which features superb off-road crossing ability and shock-absorbing performance, open source all code for secondary development. It supports multiple host computers (Raspberry Pi, Jetson Nano, Jetson Orin Nano, etc), the host computer can communicate with the ESP32 slave computer through the serial port. The design of 6 wheels × 4WD increases the contact area with the ground and load capacity, and provides strong power. Built in 3S UPS power supply module, supports 3 x 18650 Li batteries (in series, NOT included), which provides uninterruptible power for the robot and supports charging and power output at the same time. Built in multi-functional robot driver board, based on ESP32, with onboard WIFI and Bluetooth, for driving serial bus servos, outputting PWM signal, expanding TF card slot, etc.\u003c\/p\u003e\n\u003cp data-mce-fragment=\"1\" class=\"alignl pdTRBL2\"\u003eThe \u003cstrong data-mce-fragment=\"1\"\u003eUGV02\u003c\/strong\u003e adopts flexible rubber tires which greatly reduce the impact of complex terrains, can easily meet the needs of heavy loads, shock absorption, and off-road. Also, it comes with 2 x 1020 European standard profile rails, provides more possibilities for secondary development.\u003c\/p\u003e\n \u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eSpecifications\u003c\/h2\u003e\n\u003ctable data-mce-fragment=\"1\" class=\"tabSty-2 mgnTB alignc\"\u003e\n\u003ctbody data-mce-fragment=\"1\"\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eOutline dimensions\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e252×230×94mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eTire material\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eNylon wheel hub, rubber tire\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eChassis height\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e25mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eRail Center distance\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e203mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eTire width\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e42mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eRunning speed\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e0.05~0.41m\/s\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eTire diameter\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e80mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eNumber of driving wheels\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e4\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eNumber of wheels\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e6\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eBody material\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e2mm (thickness) 5052 Aluminum Alloy\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eWeight\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e2kg\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eVertical obstacle ability\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e40mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eDriving payload\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e4kg\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eClimbing ability\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e22°\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eBattery support\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e18650 Lithium battery × 3 (NOT Included)\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eMinimum turning radius\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e0m (In-situ Rotation)\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eCharging time\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e1.5h\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eBattery life\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e45min (full power continuous output)\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eMotor power\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e5W × 4\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eRemote control function\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eWIFI AP\/STA\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eUpper surface area\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e37864mm\u003csup data-mce-fragment=\"1\"\u003e2\u003c\/sup\u003e\n\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eCommunication interface\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eUART \/ serial bus servo interface \/ I2C\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003c\/tbody\u003e\n\u003c\/table\u003e\n\u003cbr data-mce-fragment=\"1\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-6.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-7.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-8.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-9.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-11.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-13.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-15.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-17.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-19.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"richGridWrap richGridWrap-3c richGridWrap-valignTop mgnTB\"\u003e\n\u003ctable style=\"width: 90%; margin: auto;\"\u003e\n\u003ctbody\u003e\n\u003ctr\u003e\n\u003ctd style=\"border: 0px; text-align: center; vertical-align: middle;\"\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-20-1.jpg\"\u003e\n\u003cp data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eConnect to Jetson Orin Nano\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003c\/td\u003e\n\u003ctd style=\"border: 0px; text-align: center; vertical-align: middle;\"\u003e\n\u003cimg data-mce-fragment=\"1\" class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-20-2.jpg\"\u003e\n\u003cp data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eConnect to Raspberry Pi 4B\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003c\/td\u003e\n\u003ctd style=\"border: 0px; text-align: center; vertical-align: middle;\"\u003e\n\u003cimg data-mce-fragment=\"1\" class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-20-3.jpg\"\u003e\n\u003cp data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eConnect to Raspberry Pi Zero\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003c\/tbody\u003e\n\u003c\/table\u003e\n\u003cbr data-mce-fragment=\"1\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-21.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"msg msg_info\"\u003eAbout the slave computer driver board, please refer to \u003ca rel=\"noopener noreferrer\" data-mce-fragment=\"1\" href=\"https:\/\/www.waveshare.com\/General-Driver-for-Robots.htm\" target=\"_blank\"\u003eGeneral-Driver-for-Robots\u003c\/a\u003e product page for more details\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"msg msg_info\"\u003e\u003cbr\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-23.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e \u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eDimensions\u003c\/h2\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-size.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eResources \u0026amp; Services\u003c\/h2\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"bgGrey\"\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eWIKI: \u003c\/strong\u003e\u003ca data-mce-fragment=\"1\" href=\"http:\/\/www.waveshare.com\/wiki\/UGV02\" target=\"_blank\"\u003ewww.waveshare.com\/wiki\/UGV02\u003c\/a\u003e\n\u003c\/div\u003e\n\u003ch2 data-mce-fragment=\"1\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\"\u003ePackage Contents:\u003c\/h2\u003e\n\u003cp\u003e\u003cstrong\u003eWeight: \u003c\/strong\u003e\u003cspan\u003e3.402 kg\u003c\/span\u003e\u003c\/p\u003e\n\u003cdiv class=\"std\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-pack.jpg\"\u003e\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e","published_at":"2023-08-27T02:36:33+05:30","created_at":"2023-08-27T02:33:00+05:30","vendor":"Waveshare","type":"DIY Kit","tags":["25076","25077","6WD","6WD Robot","6WD Robot Chassis","DIY Robot","DIY Robotics","DIY-KIT","educational robot","Educational Robot Kit","featured","Mechanical Robot","Mini Robot Chassis","RBC1","RBT-CHSS","Robot","Robot Chassis","Robot Chassis Wheel","robot control","robot track","robot wheel","Robotic Manipulator","rubber tracks","tank track","Tracked","tracks","Waveshare","WVSH","ZOHO UPDATED"],"price":1699999,"price_min":1699999,"price_max":1699999,"available":true,"price_varies":false,"compare_at_price":2199999,"compare_at_price_min":2199999,"compare_at_price_max":2199999,"compare_at_price_varies":false,"variants":[{"id":46575223800125,"title":"Default Title","option1":"Default Title","option2":null,"option3":null,"sku":"WVSH0279","requires_shipping":true,"taxable":true,"featured_image":null,"available":true,"name":"Flexible And Expandable 6x4 Off-Road UGV, With Extension Rails and ESP32 Slave Computer, 6 wheels 4WD Mobile Robot Chassis","public_title":null,"options":["Default Title"],"price":1699999,"weight":2001,"compare_at_price":2199999,"inventory_management":"shopify","barcode":"WVSH0279","requires_selling_plan":false,"selling_plan_allocations":[]}],"images":["\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-1.jpg?v=1693083976","\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-2.jpg?v=1693083976","\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-6.jpg?v=1693083976","\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-3.jpg?v=1693083976","\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-7.jpg?v=1693083976","\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-4.jpg?v=1693083976","\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-5.jpg?v=1693083976"],"featured_image":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-1.jpg?v=1693083976","options":["Title"],"media":[{"alt":null,"id":34672469967165,"position":1,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-1.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-1.jpg?v=1693083976","width":800},{"alt":null,"id":34672469934397,"position":2,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-2.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-2.jpg?v=1693083976","width":800},{"alt":null,"id":34672469901629,"position":3,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-6.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-6.jpg?v=1693083976","width":800},{"alt":null,"id":34672469836093,"position":4,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-3.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-3.jpg?v=1693083976","width":800},{"alt":null,"id":34672469868861,"position":5,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-7.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-7.jpg?v=1693083976","width":800},{"alt":null,"id":34672469803325,"position":6,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-4.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-4.jpg?v=1693083976","width":800},{"alt":null,"id":34672469770557,"position":7,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-5.jpg?v=1693083976"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/ugv02-5.jpg?v=1693083976","width":800}],"requires_selling_plan":false,"selling_plan_groups":[],"content":"\u003cdiv data-mce-fragment=\"1\" style=\"text-align: center;\"\u003e\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-1.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-3.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eFeatures At A Glance\u003c\/h2\u003e\n\u003cp data-mce-fragment=\"1\" class=\"alignl pdTRBL2\"\u003eThe \u003cstrong data-mce-fragment=\"1\"\u003eUGV02\u003c\/strong\u003e series is a 6 wheels × 4WD mobile robot chassis, which features superb off-road crossing ability and shock-absorbing performance, open source all code for secondary development. It supports multiple host computers (Raspberry Pi, Jetson Nano, Jetson Orin Nano, etc), the host computer can communicate with the ESP32 slave computer through the serial port. The design of 6 wheels × 4WD increases the contact area with the ground and load capacity, and provides strong power. Built in 3S UPS power supply module, supports 3 x 18650 Li batteries (in series, NOT included), which provides uninterruptible power for the robot and supports charging and power output at the same time. Built in multi-functional robot driver board, based on ESP32, with onboard WIFI and Bluetooth, for driving serial bus servos, outputting PWM signal, expanding TF card slot, etc.\u003c\/p\u003e\n\u003cp data-mce-fragment=\"1\" class=\"alignl pdTRBL2\"\u003eThe \u003cstrong data-mce-fragment=\"1\"\u003eUGV02\u003c\/strong\u003e adopts flexible rubber tires which greatly reduce the impact of complex terrains, can easily meet the needs of heavy loads, shock absorption, and off-road. Also, it comes with 2 x 1020 European standard profile rails, provides more possibilities for secondary development.\u003c\/p\u003e\n \u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eSpecifications\u003c\/h2\u003e\n\u003ctable data-mce-fragment=\"1\" class=\"tabSty-2 mgnTB alignc\"\u003e\n\u003ctbody data-mce-fragment=\"1\"\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eOutline dimensions\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e252×230×94mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eTire material\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eNylon wheel hub, rubber tire\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eChassis height\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e25mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eRail Center distance\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e203mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eTire width\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e42mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eRunning speed\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e0.05~0.41m\/s\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eTire diameter\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e80mm\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eNumber of driving wheels\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e4\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eNumber of wheels\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e6\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eBody material\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e2mm (thickness) 5052 Aluminum Alloy\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eWeight\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e2kg\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eVertical obstacle ability\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e40mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eDriving payload\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e4kg\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eClimbing ability\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e22°\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eBattery support\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e18650 Lithium battery × 3 (NOT Included)\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eMinimum turning radius\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e0m (In-situ Rotation)\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eCharging time\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e1.5h\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eBattery life\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e45min (full power continuous output)\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eMotor power\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e5W × 4\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eRemote control function\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eWIFI AP\/STA\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eUpper surface area\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e37864mm\u003csup data-mce-fragment=\"1\"\u003e2\u003c\/sup\u003e\n\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eCommunication interface\u003c\/strong\u003e\u003c\/td\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eUART \/ serial bus servo interface \/ I2C\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003c\/tbody\u003e\n\u003c\/table\u003e\n\u003cbr data-mce-fragment=\"1\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-6.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-7.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-8.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-9.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-11.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-13.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-15.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-17.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-19.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"richGridWrap richGridWrap-3c richGridWrap-valignTop mgnTB\"\u003e\n\u003ctable style=\"width: 90%; margin: auto;\"\u003e\n\u003ctbody\u003e\n\u003ctr\u003e\n\u003ctd style=\"border: 0px; text-align: center; vertical-align: middle;\"\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-20-1.jpg\"\u003e\n\u003cp data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eConnect to Jetson Orin Nano\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003c\/td\u003e\n\u003ctd style=\"border: 0px; text-align: center; vertical-align: middle;\"\u003e\n\u003cimg data-mce-fragment=\"1\" class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-20-2.jpg\"\u003e\n\u003cp data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eConnect to Raspberry Pi 4B\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003c\/td\u003e\n\u003ctd style=\"border: 0px; text-align: center; vertical-align: middle;\"\u003e\n\u003cimg data-mce-fragment=\"1\" class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-20-3.jpg\"\u003e\n\u003cp data-mce-fragment=\"1\"\u003e\u003cstrong data-mce-fragment=\"1\"\u003eConnect to Raspberry Pi Zero\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003c\/tbody\u003e\n\u003c\/table\u003e\n\u003cbr data-mce-fragment=\"1\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-21.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"msg msg_info\"\u003eAbout the slave computer driver board, please refer to \u003ca rel=\"noopener noreferrer\" data-mce-fragment=\"1\" href=\"https:\/\/www.waveshare.com\/General-Driver-for-Robots.htm\" target=\"_blank\"\u003eGeneral-Driver-for-Robots\u003c\/a\u003e product page for more details\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"msg msg_info\"\u003e\u003cbr\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-23.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e \u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eDimensions\u003c\/h2\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-size.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eResources \u0026amp; Services\u003c\/h2\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"bgGrey\"\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eWIKI: \u003c\/strong\u003e\u003ca data-mce-fragment=\"1\" href=\"http:\/\/www.waveshare.com\/wiki\/UGV02\" target=\"_blank\"\u003ewww.waveshare.com\/wiki\/UGV02\u003c\/a\u003e\n\u003c\/div\u003e\n\u003ch2 data-mce-fragment=\"1\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\"\u003ePackage Contents:\u003c\/h2\u003e\n\u003cp\u003e\u003cstrong\u003eWeight: \u003c\/strong\u003e\u003cspan\u003e3.402 kg\u003c\/span\u003e\u003c\/p\u003e\n\u003cdiv class=\"std\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/UGV02\/UGV02-details-pack.jpg\"\u003e\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e"}
{
"product_id": 8630100492605,
"variant_id" : 46575223800125,
"variant_available" : true,
"inventory_quantity" : -3,
"inventory_management" : "shopify",
"inventory_policy" : "continue",
"image": "//thinkrobotics.com/cdn/shop/files/ugv02-1.jpg?v=1693083976",
"price": "1699999",
"title": "Default Title",
"value": "Default Title"
}
{
"product_id": "ODYzMDEwMDQ5MjYwNQ==",
"variant_id" : "NDY1NzUyMjM4MDAxMjU=",
"variant_available" : "dHJ1ZQ==",
"inventory_quantity" : "LTM=",
"inventory_management" :"c2hvcGlmeQ==",
"inventory_policy" : "Y29udGludWU=",
"image":"JTJGJTJGdGhpbmtyb2JvdGljcy5jb20lMkZjZG4lMkZzaG9wJTJGZmlsZXMlMkZ1Z3YwMi0xLmpwZyUzRnYlM0QxNjkzMDgzOTc2",
"price": "MTY5OTk5OQ==",
"title": "RGVmYXVsdCtUaXRsZQ==",
"value": "RGVmYXVsdCtUaXRsZQ==",
"variant_options": {"Title": "RGVmYXVsdCtUaXRsZQ=="
}
}
India
---
Australia
Canada
India
Mexico
United Arab Emirates
United States