


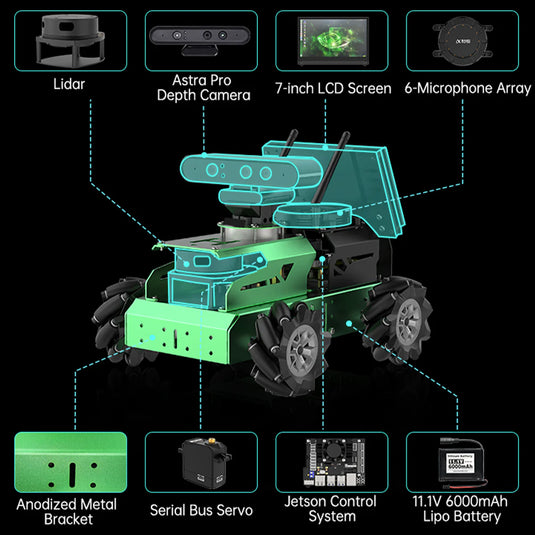








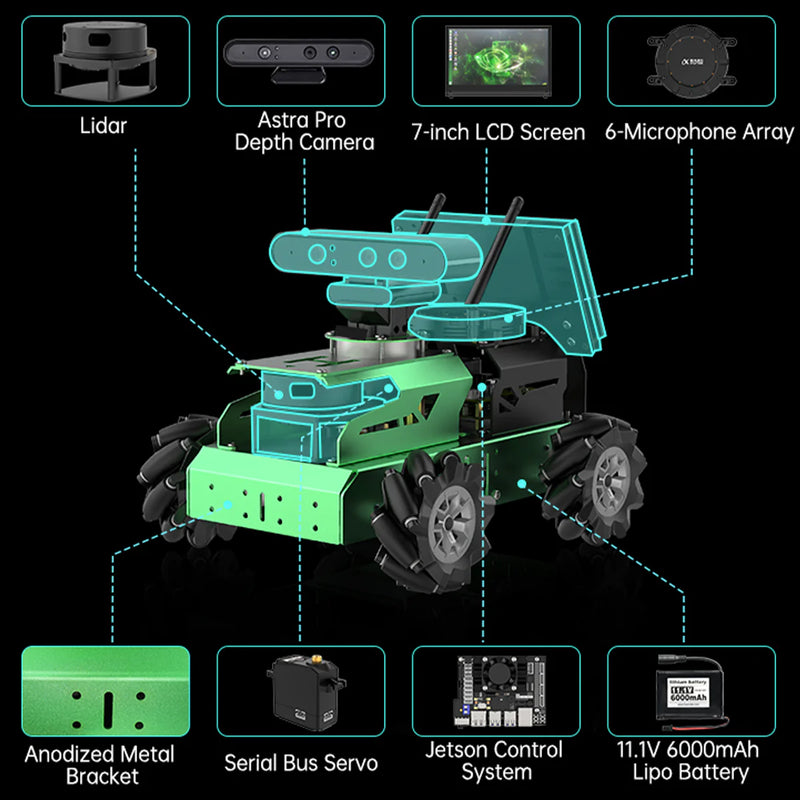


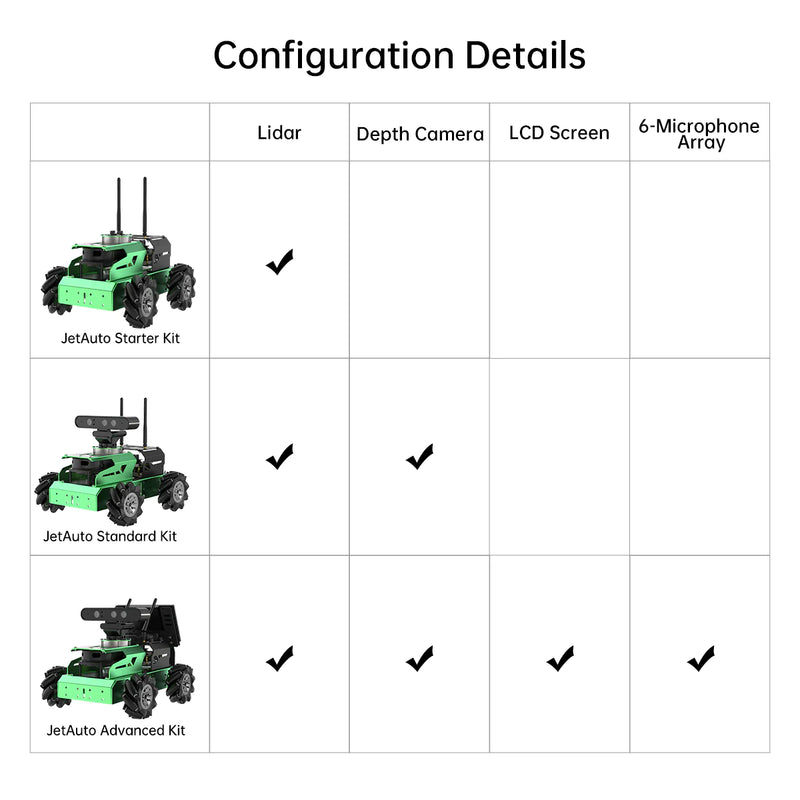






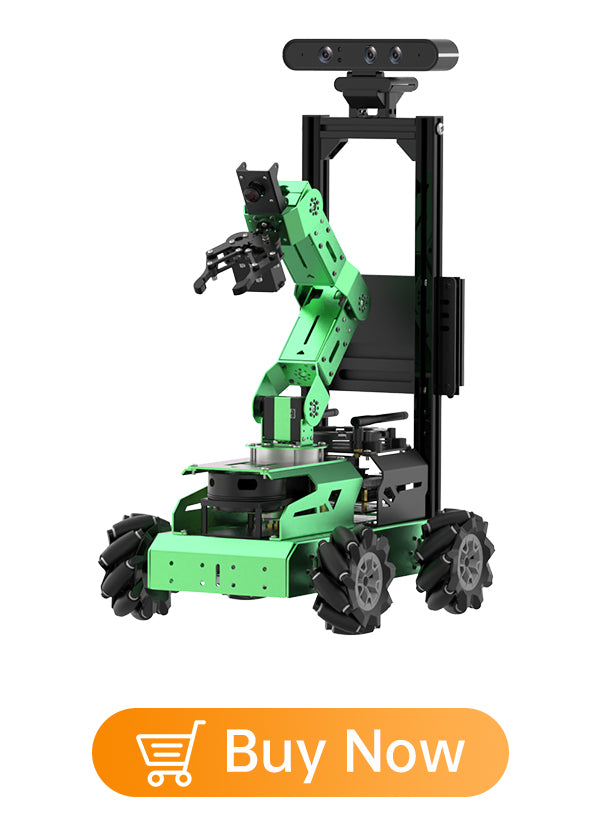
JetAuto is an entry-level ROS education robot powered by Jetson Nano. Featuring a Lidar, depth camera and 7-inch screen, JetAuto provides various functionalities, such as robot motion control, mapping and navigation and human feature recognition.

360° Omnidirectional MovementWith 4 omnidirectional mecanum wheels, JetAuto can move 360°. Different movement modes (move forward, horizontally, diagonally and rotate ) and excellent performance make it bold to challenge various complicated routes. |

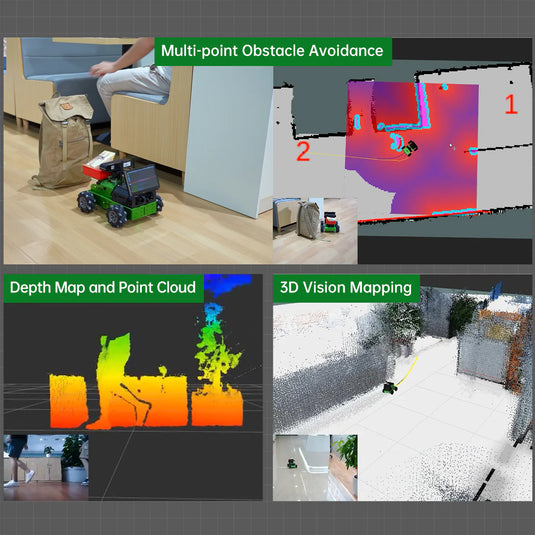
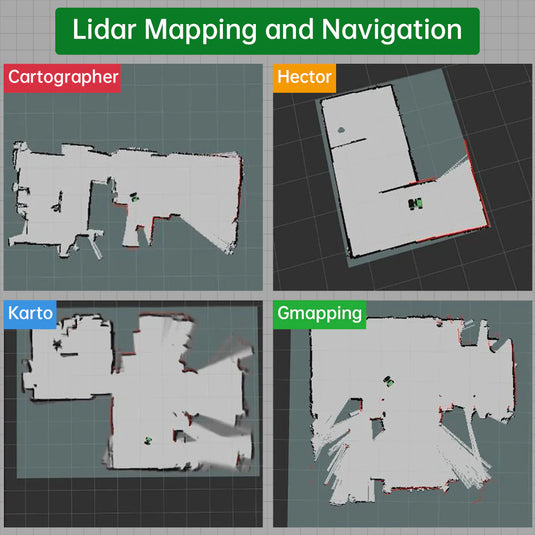
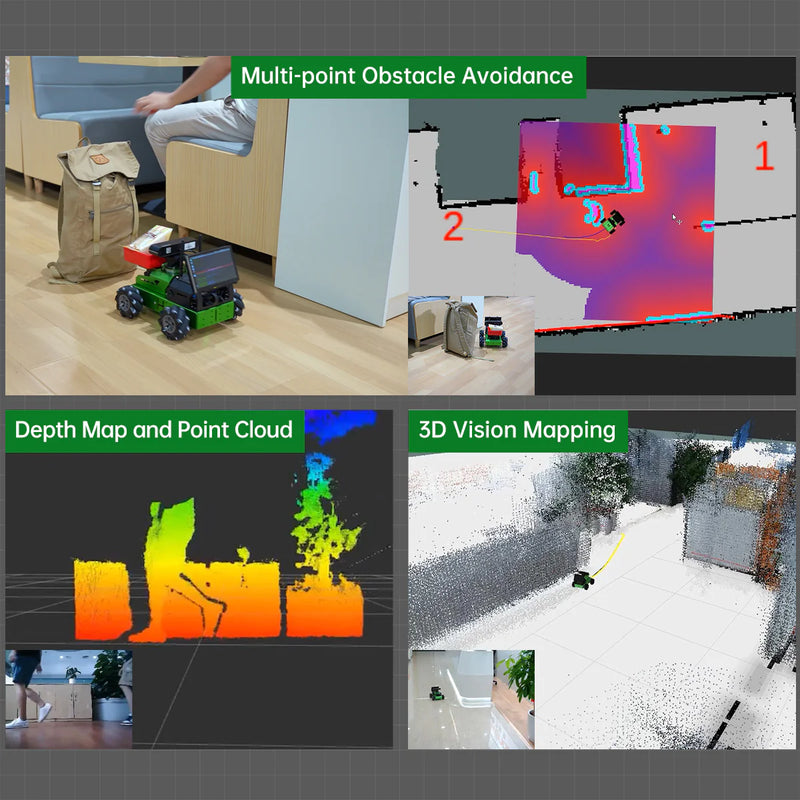
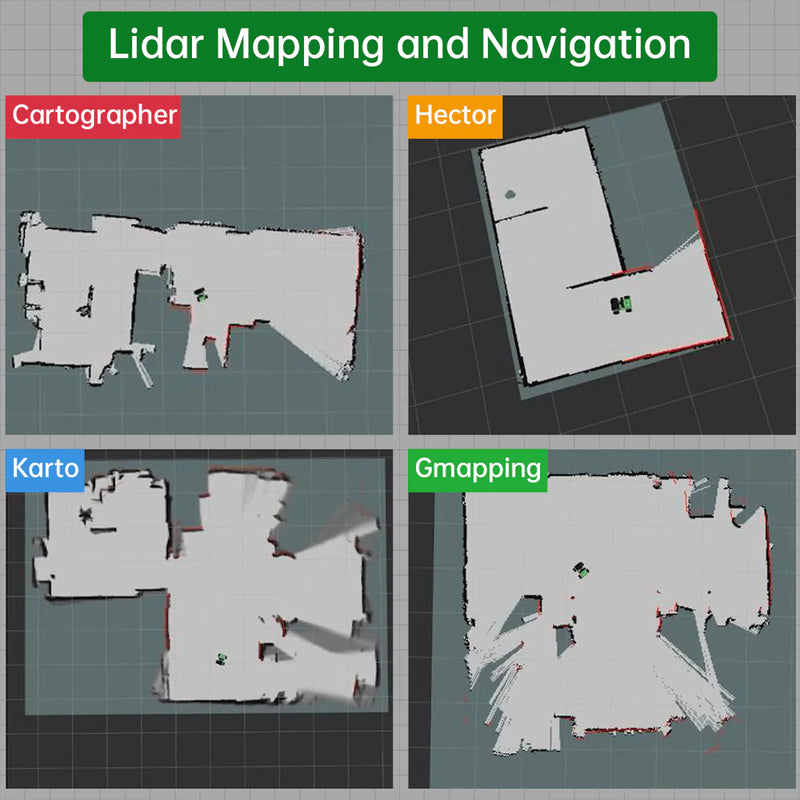
Equipped with Lidar Supports SLAM Mapping NavigationJetAuto is equipped with lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoidance. |
Dual-Controller Design for Efficient Collaboration


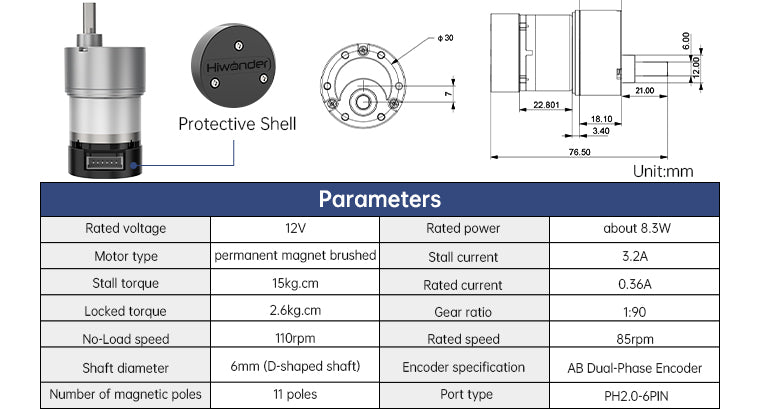
DC Geared MotorIt offers robust force, has a high-precision encoder,and includes a protective end shell to ensure an extended service life. |

7-inch HD LCD Touch ScreenWith a resolution of 1024 x 600 pixels and compatible with NVIDIA, this screen allows you to freely monitor and debug various parameters of the robot. |

240° High-performance Pan-tiltJetAuto's high-precision pendulum suspension structure balances the force exerted on all four wheels, enabling good adaptability to uneven surfaces. |

6CH Far-field Microphone ArrayThe 6-channel microphone array and speakers support sound source positioning, voice recognition control, voice navigation and other functions. |
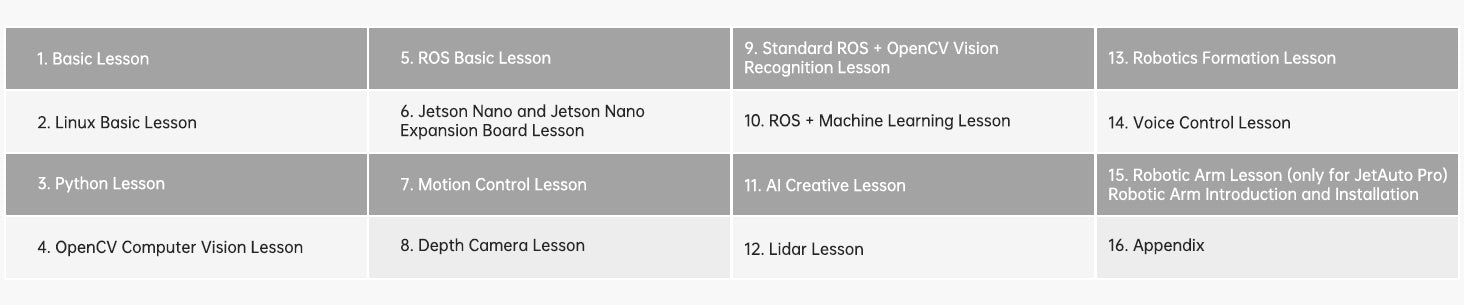
Function List






MediaPipe Development, Upgraded AI Interaction
JetAuto utilizes MediaPipe development framework to accomplish various functions, such as human body recognition, fingertip recognition, face detection, and 3D detection.

Fingertip Trajectory Recognition |
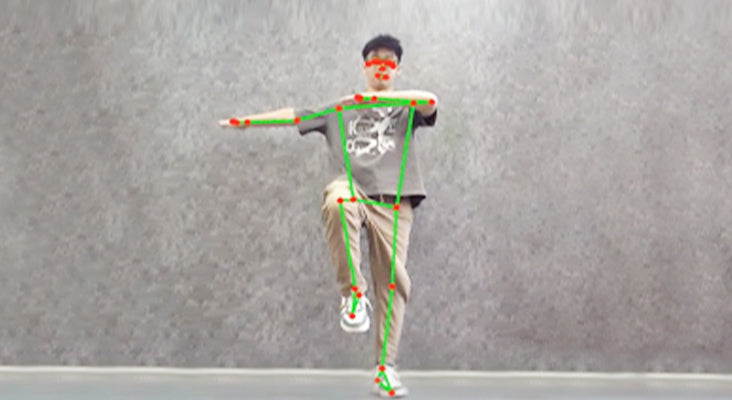
Human Body Recognition |

3D Detection |

3D Face Detection |
AI Vision Interaction
By incorporating artificial intelligence, JetAuto can implement KCF target tracking, line following, color/ tag recognition and tracking, YOLO object recognition and more.

KCF Target TrackingRelying on KCF filtering algorithm, the robot can track the selected target. |

Vision Line FollowingJetAuto supports custom color selection, and the robot can identify color lines and follow them. |
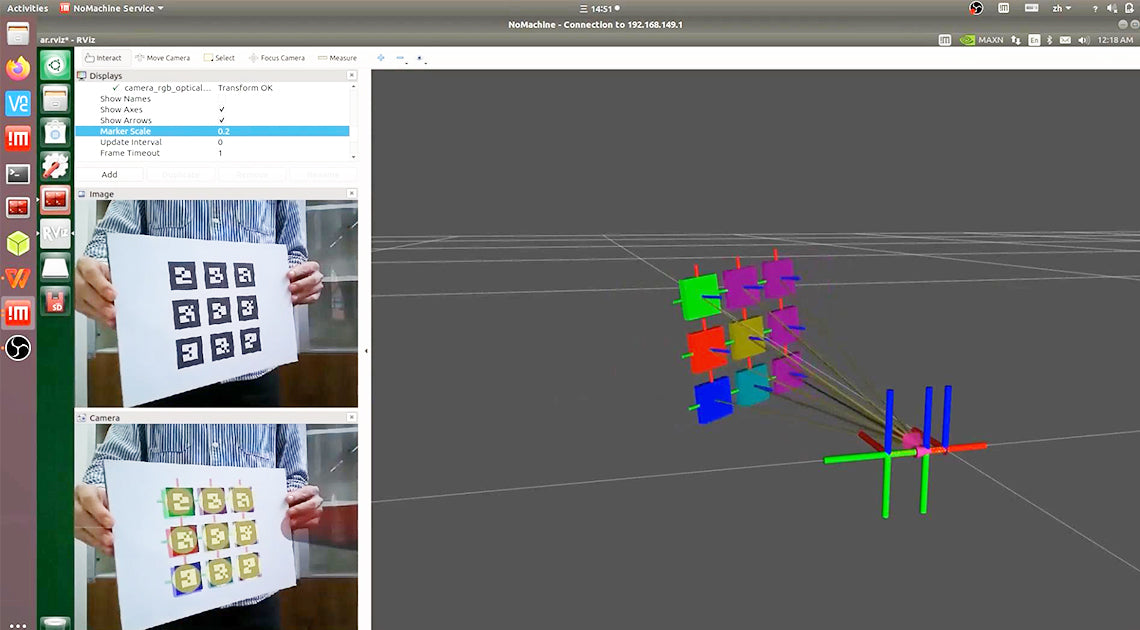
Color/ Tag Recognition and TrackingJetAuto is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates at the same time. |
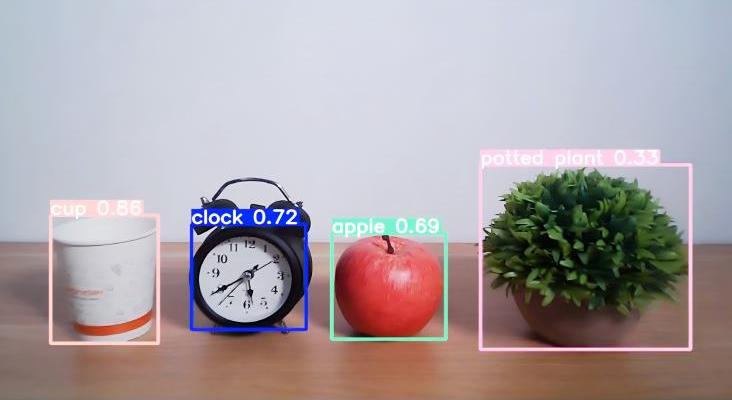
YOLO Object RecognitionUtilize YOLO network algorithm and deep learning model library to recognize the objects. |
6CH Far-field Microphone Array
This 6CH far-field microphone array is adroit at far-field sound source localization, voice recognition and voice interaction. In comparison to ordinary microphone module,it can implement more advanced functions.



ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.

Gazebo Simulation
JetAuto is built on the Robot Operating System (ROS) and integrates with Gazebo simulation. This enables effortless control of the robot in a simulated environment, facilitating algorithm prevalidation to prevent potential errors. Gazebo provides visual data, allowing you to observe the motion trajectories of each endpoint and center. This visual feedback facilitates algorithm enhancement.

Body Simulation ControlThrough robot simulation control, algorithm verification of mapping navigation can be carried out to improve the iteration speed of the algorithm and reduce the cost of trial and error. |

Rviz Shows URDF ModelProvide an accurate URDF model, and observe the mapping navigation effect through the Rviz visualization tool to facilitate debugging and improving algorithms. |






Wrapped Rear Tail ShellIt can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor. |
Permanent Magnet Brushed MotorThe permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change. |

High-precision Magnetic EncoderThe motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability. |
Adapt to Various ScenesThe low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials. |
Hall Encoder Geared Motor520 motor comes with high-accuracy encoder, and features strong force and high performance. The built-in AB phase incremental Hall encoder stands out for its high accuracy and anti-interference ability. |
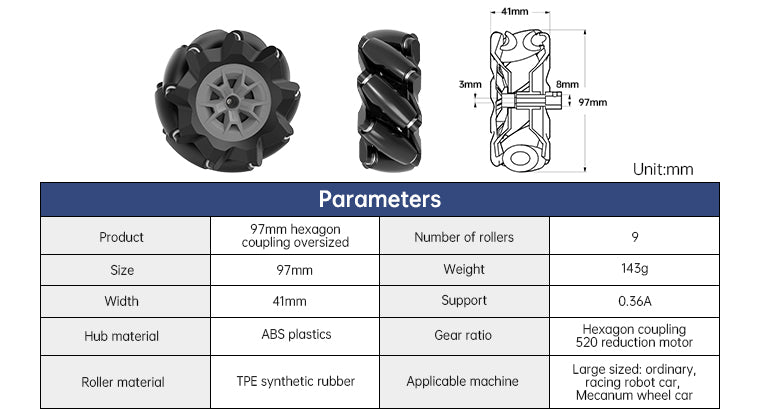
Mecanum WheelThe mecanum wheel has a compact structure and flexible movement, supports 360° all-round movement, and realizes the full lateral movement of the car. |

Multi-functional Expansion BoardThe expansion board has a built-in IMU sensor which can detects robot posture in real time. There are 2-channel PWM, two keys, a LED, a buzzer, 9-channel serial bus servo interface, two GPIO expansion ports and two llC interfaces on it. |

Lithium battery parametersThe fuselage has a built-in 11.1V 6000mAh large-capacity lithium battery to improve the robot's endurance. |

 |
 |
 |
 |
|
|---|---|---|---|---|
| JetTank | JetAcker | JetAuto | JetAuto Pro | |
| Chassis | Tracked chassis | Ackerman steering structure | Pendulum suspension chassis | Pendulum suspension chassis |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Motor | 520 Motor*2 | 520 Motor*2 | 520 Motor*4 | 520 Motor*4 |
| Servo | Intelligent servo*1 | Intelligent servo*2 | Intelligent servo*1 | Intelligent servo*5 |
| Camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera and monocular camera |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Lidar | SLAMTEC A1/ EAI G4 | |||
| Robot Arm | / | / | / | Monocular vision robotic arm |
| Features | ROS in-depth development Able to overcome obstacles | Autonomous driving research | Pendulum suspension for stable driving 360° omnidirectional movement | Grabbing and transporting |
Specification Parameters
Product Parameters |

Dimensional Diagram |
||||||||||||||||||||||||||||||

SLAMTEC A1 Lidar Parameters |

EAI G4 Lidar Parameters |
||||||||||||||||||||||||||||||

Depth Camera Parameters |

6-Microphone Array Parameters |
||||||||||||||||||||||||||||||

7-inch LCD Screen Parameters |

HTS-20H Servo Parameters |
Abundant Learning Materials

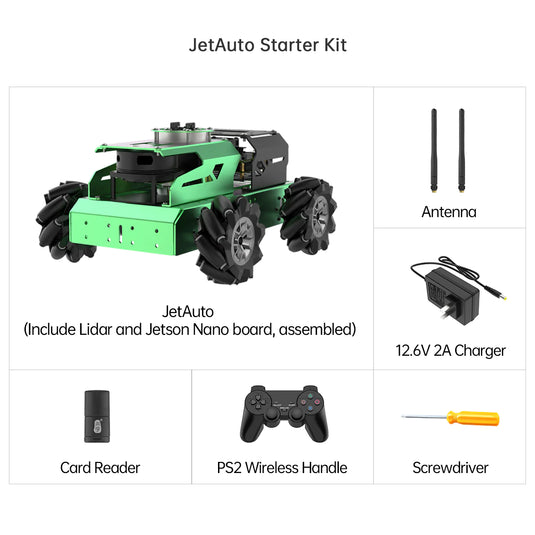
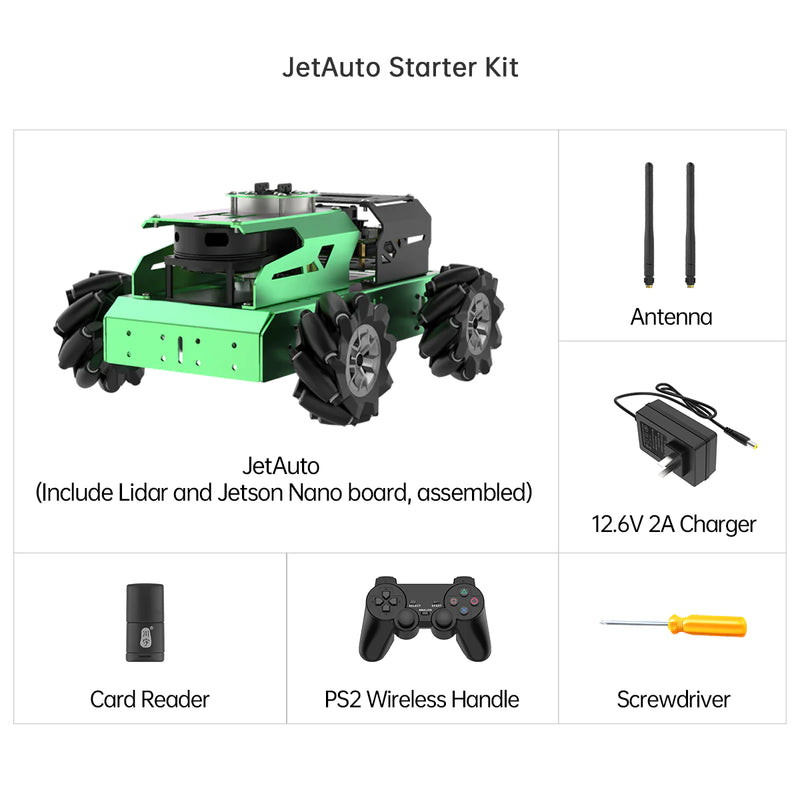
JetAuto Starter Packing List

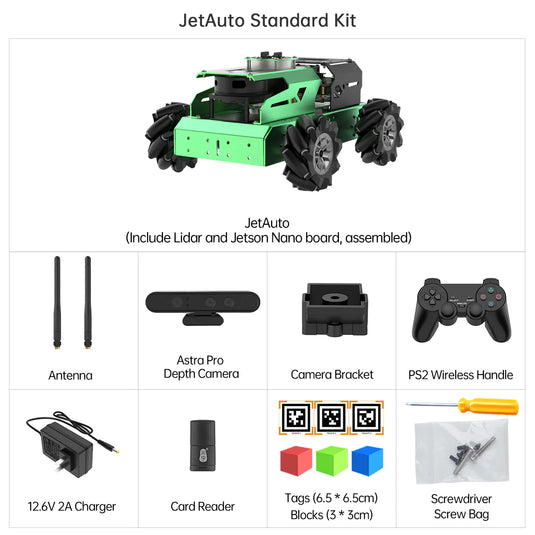
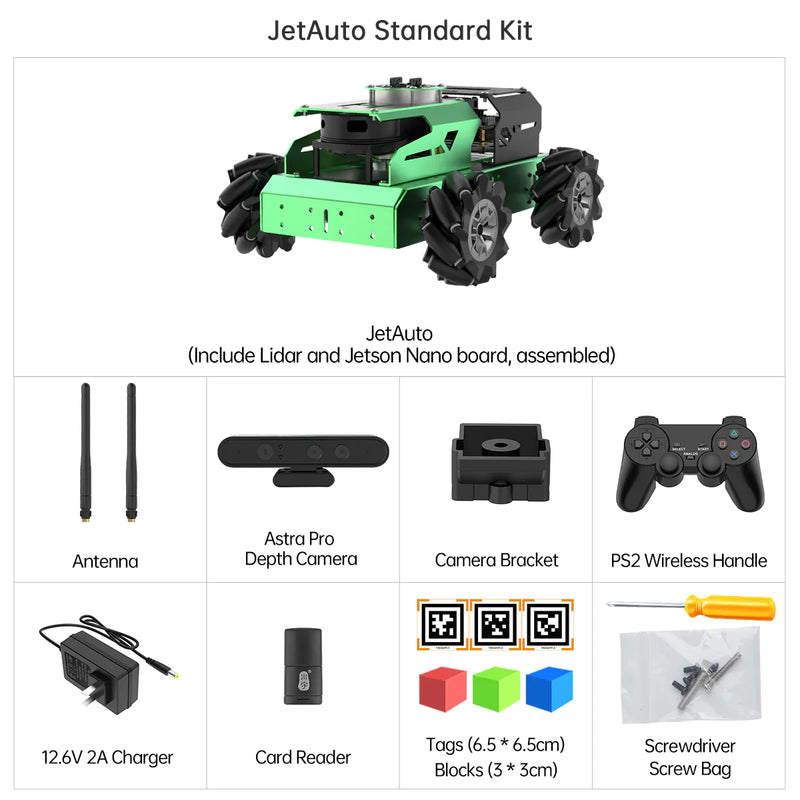
JetAuto Standard Packing List

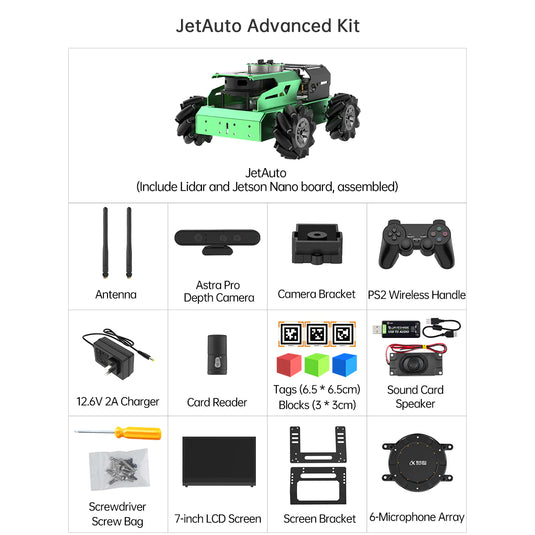
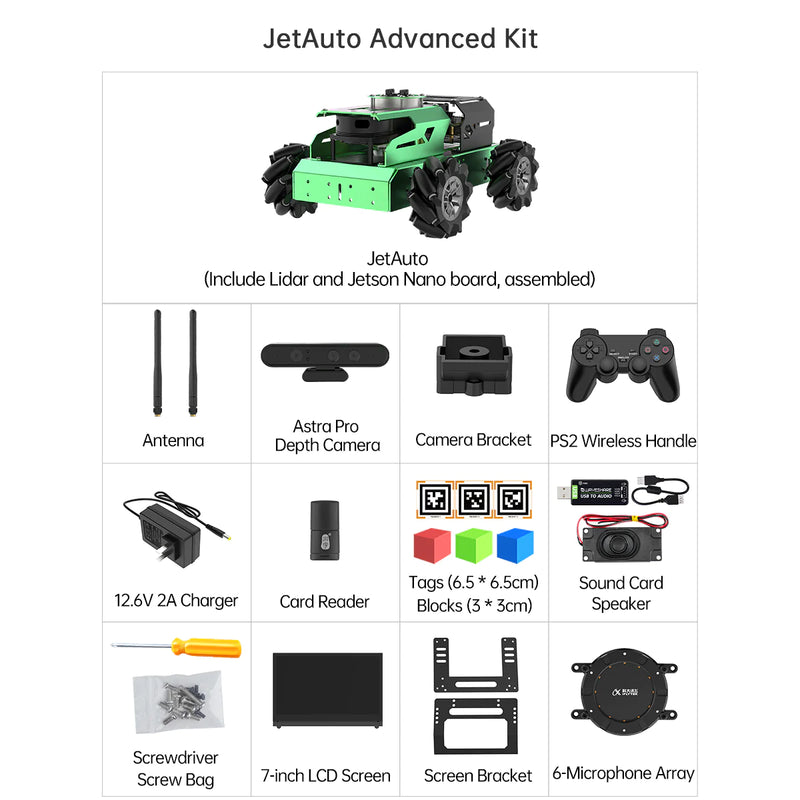
JetAuto Advanced Packing List

JetAuto Ultimate Packing List

Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.
