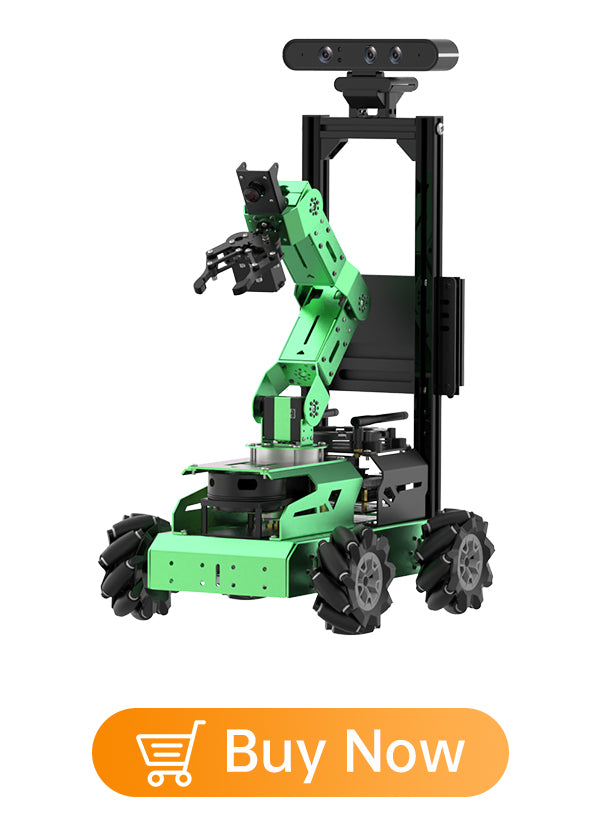
JetAcker is powered by NVIDIA Jetson Nano B01 and supports Robot Operating System (ROS). It leverages mainstream deep learning frameworks, incorporates MediaPipe development, enables YOLO model training, and utilizes TensorRT acceleration. This combination delivers a diverse range of 3D machine vision applications, including autonomous driving, somatosensory interaction, and KCF target tracking. Moreover, with JetAcker, you can learn and validate various robotic SLAM algorithms.
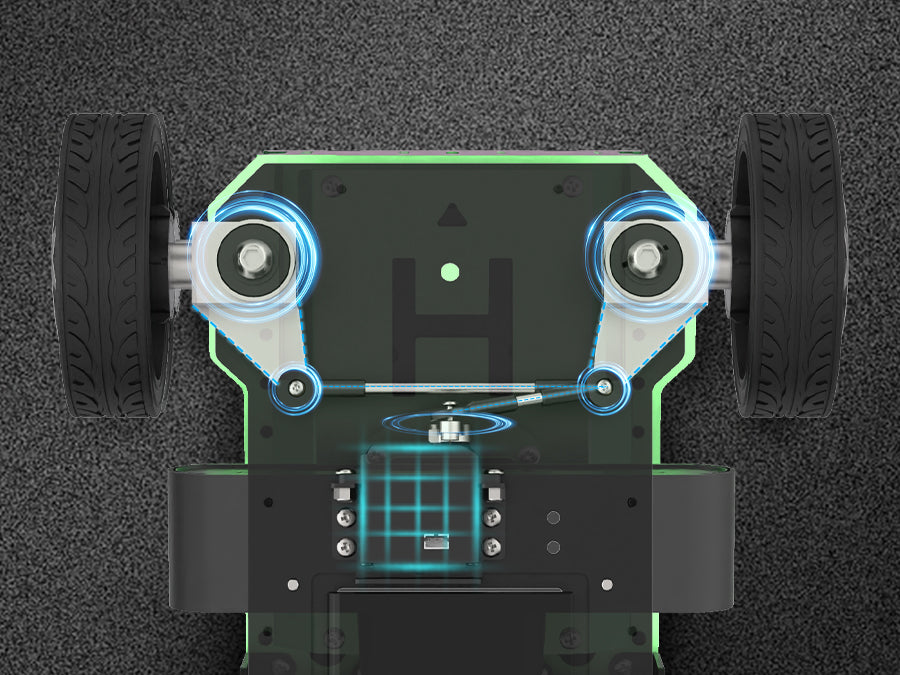
Ackerman Steering Structure Pendulum Suspension
The rear wheels of the chassis are always in a parallel state. When turning, the inner wheel rotation angle is greater than the outer wheel rotation angle. Steering through the difference in rotation angle of the inner and outer wheels is called Ackermann steering.
Equipped with Lidar & Supports SLAM Mapping Navigation
JetAcker is equipped with lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoidance.
Payload capacity, deformation resistance, reduced friction coefficient and minimized mechanical wear, resulting in an extended lifespan.
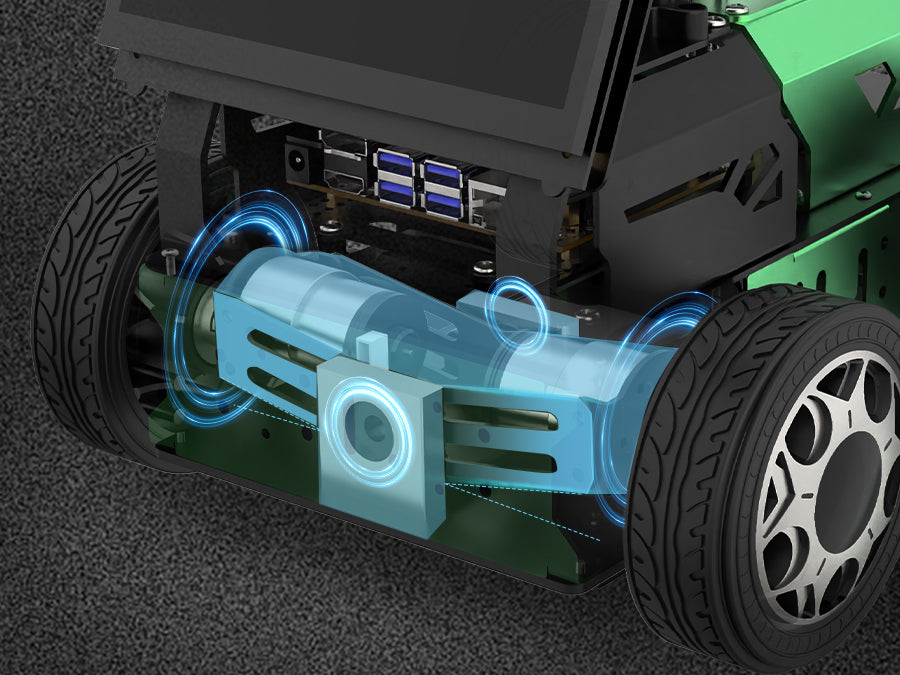
Pendulum Suspension Structure
High-precision pendulum suspension structure balances the force, enabling good adaptability to uneven surfaces while preventing any impact on motor.
240° High-performance Pan-tilt
It is driven by an serial bus servo which provides over-temperature protection. Its up to 240° rotation range extends JetAcker's exploration ranges.
Function List
3D Vision AI Upgraded Interaction
JetAcker is equipped with a 3D depth camera, supports 3D vision mapping and navigation, and can obtain 3D point cloud images. Through deep learning, it can realize more AI vision interactive gameplay.
MediaPipe Development, Upgraded AI Interaction
JetAcker utilizes MediaPipe development framework to accomplish various functions, such as human body recognition, fingertip recognition, face detection, and 3D detection.
Fingertip Trajectory Recognition
Human Body Recognition
3D Detection
3D Face Detection
AI Vision Interaction
By incorporating artificial intelligence, JetAcker can implement KCF target tracking, line following, color/ tag recognition and tracking, YOLO object recognition and more.
KCF Target Tracking
Relying on KCF filtering algorithm, the robot can track the selected target.
Vision Line Following
JetAcker supports custom color selection, and the robot can identify color lines and follow them.
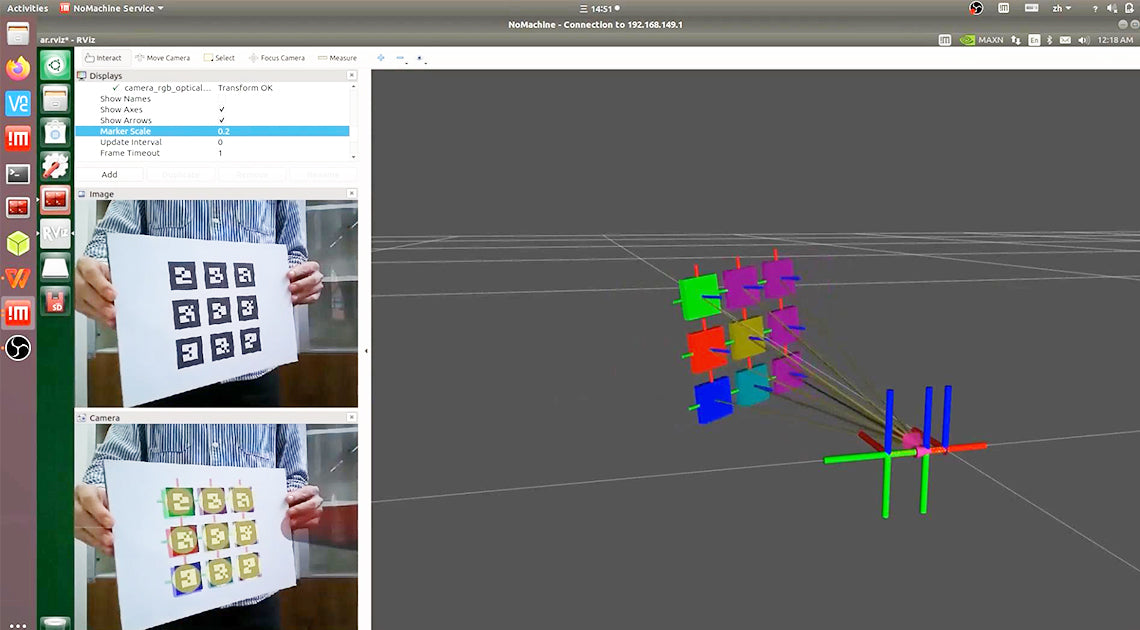
Color/ Tag Recognition and Tracking
JetAcker is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates at the same time.
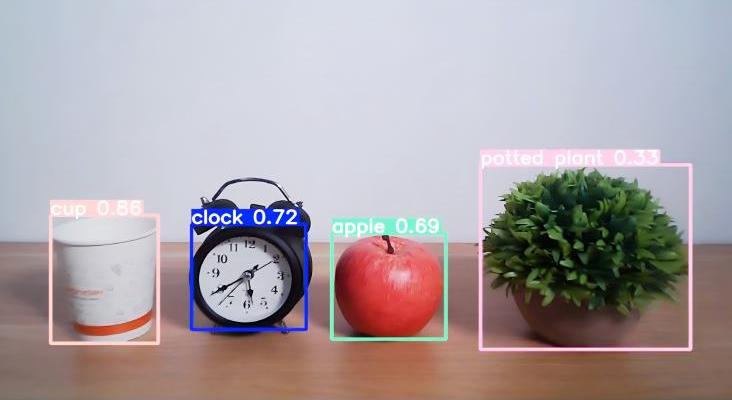
YOLO Object Recognition
Utilize YOLO network algorithm and deep learning model library to recognize the objects.
6CH Far-field Microphone Array
This 6CH far-field microphone array is adroit at far-field sound source localization, voice recognition and voice interaction. In comparison to ordinary microphone module,it can implement more advanced functions.
Sound Source Localization
Through the 6-microphone array, high-precision positioning of noise reduction sources is achieved. With radar distance recognition, Hiwonder can be summoned at any location.
TTS Voice Broadcast
The text content published by ROS can be directly converted into voice broadcast to facilitate interactive design.
Voice Interaction
Speech recognition and TTS voice broadcast are combined to realize voice interaction and support the expansion of iFlytek's online voice conversation function.
Voice Navigation
Use voice commands to control Hiwonder to reach any designated location on the map, similar to the voice control scenario of a food delivery robot.
ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.
Gazebo Simulation
JetAcker is built on the Robot Operating System (ROS) and integrates with Gazebo simulation. This enables effortless control of the robot in a simulated environment, facilitating algorithm prevalidation to prevent potential errors. Gazebo provides visual data, allowing you to observe the motion trajectories of each endpoint and center. This visual feedback facilitates algorithm enhancement.
Body Simulation Control
Through robot simulation control, algorithm verification of mapping navigation can be carried out to improve the iteration speed of the algorithm and reduce the cost of trial and error.
Rviz Shows URDF Model
Provide an accurate URDF model, and observe the mapping navigation effect through the Rviz visualization tool to facilitate debugging and improving algorithms.
Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.
High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.
Hall Encoder Geared Motor
520 motor comes with high-accuracy encoder, and features strong force and high performance. The built-in AB phase incremental Hall encoder stands out for its high accuracy and anti-interference ability.
Ackermann Wheel
It has the advantages of high load and no deformation, which prevents the tire from falling due to overweight of the vehicle body, effectively reduces the friction coefficient and mechanical loss, and extends the tire life.
Multi-functional Expansion Board
The expansion board has a built-in IMU sensor which can detects robot posture in real time. There are 2-channel PWM, two keys, a LED, a buzzer, 9-channel serial bus servo interface, two GPIO expansion ports and two IIC interfaces on it.
Lithium Battery Parameters
The fuselage has a built-in 11.1V 6000mAh large-capacity lithium battery to improve the robot's endurance.
ROS in-depth development Able to overcome obstacles
Autonomous driving research
Pendulum suspension for stable driving 360° omnidirectional movement
Grabbing and transporting
Specification Parameters
Size:
316*259*242mm
Weight:
4.8kg
Material:
Full-metal hard aluminum alloy bracket
Battery:
11.1V 6000mAh Lipo battery
Continuous working life:
90min
Hardware:
ROS controller and ROS expansion board
Operating system:
Ubuntu 18.04 LTS + ROS Melodic
Software:
iOS/ Android app
Communication:
USB/ WiFi/ Ethernet
Programming language:
Python/ C/ C++/ JavaScript
Storage:
32GB TF card
Servo:
HTS-20H serial bus servo
Control method:
Phone/ Handle control
Package size (advanced kit):
38*31*23cm
Package weight (advanced kit):
About 5kg
Product Parameters
Dimensional Diagram
SLAMTEC A1 Lidar Parameters
EAI G4 Lidar Parameters
Depth Camera Parameters
6CH Far-Field Microphone Array Parameters
7-inch LCD Screen Parameters
HTS-20H Servo Parameters
Abundant Learning Materials
JetAcker Starter Packing List
JetAcker Standard Packing List
JetAcker Advanced Packing List
JetAcker Ultimate Packing List
What powers JetAcker and what software does it support?
It is powered by NVIDIA Jetson Nano B01 and runs ROS. It supports mainstream deep learning frameworks, MediaPipe development, YOLO model training, and TensorRT acceleration.
What are the main steering and suspension features?
The chassis uses an Ackermann Steering Structure with a full metal CNC steering system and pendulum suspension for stability. The rear wheels remain parallel and turning is achieved by the difference in inner and outer wheel angles.
What sensing and AI capabilities does it include?
It includes LiDAR for SLAM mapping and navigation, and a 3D depth camera for 3D vision. It also supports AI features such as KCF target tracking, color and tag recognition, and YOLO object recognition.
What is the intended use and development environment?
JetAcker is designed for robotics education and research, enabling learning and validating SLAM, mapping, and AI vision algorithms. It integrates with ROS and Gazebo simulation for algorithm prevalidation.
What is the battery life and is warranty information provided?
The robot uses an 11.1V 6000mAh lithium battery with up to 90 minutes of continuous operation. Warranty details are not provided in the product information.
No reviews yet. Be the first to share your experience!
JetAcker is powered by NVIDIA Jetson Nano B01 and supports Robot Operating System (ROS). It leverages mainstream deep learning frameworks, incorporates MediaPipe development, enables YOLO model training, and utilizes TensorRT acceleration. This combination delivers a diverse range of 3D machine vision applications, including autonomous driving, somatosensory interaction, and KCF target tracking. Moreover, with JetAcker, you can learn and validate various robotic SLAM algorithms.
Ackerman Steering Structure Pendulum Suspension
The rear wheels of the chassis are always in a parallel state. When turning, the inner wheel rotation angle is greater than the outer wheel rotation angle. Steering through the difference in rotation angle of the inner and outer wheels is called Ackermann steering.
Equipped with Lidar & Supports SLAM Mapping Navigation
JetAcker is equipped with lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoidance.
Payload capacity, deformation resistance, reduced friction coefficient and minimized mechanical wear, resulting in an extended lifespan.
Pendulum Suspension Structure
High-precision pendulum suspension structure balances the force, enabling good adaptability to uneven surfaces while preventing any impact on motor.
240° High-performance Pan-tilt
It is driven by an serial bus servo which provides over-temperature protection. Its up to 240° rotation range extends JetAcker's exploration ranges.
Function List
3D Vision AI Upgraded Interaction
JetAcker is equipped with a 3D depth camera, supports 3D vision mapping and navigation, and can obtain 3D point cloud images. Through deep learning, it can realize more AI vision interactive gameplay.
MediaPipe Development, Upgraded AI Interaction
JetAcker utilizes MediaPipe development framework to accomplish various functions, such as human body recognition, fingertip recognition, face detection, and 3D detection.
Fingertip Trajectory Recognition
Human Body Recognition
3D Detection
3D Face Detection
AI Vision Interaction
By incorporating artificial intelligence, JetAcker can implement KCF target tracking, line following, color/ tag recognition and tracking, YOLO object recognition and more.
KCF Target Tracking
Relying on KCF filtering algorithm, the robot can track the selected target.
Vision Line Following
JetAcker supports custom color selection, and the robot can identify color lines and follow them.
Color/ Tag Recognition and Tracking
JetAcker is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates at the same time.
YOLO Object Recognition
Utilize YOLO network algorithm and deep learning model library to recognize the objects.
6CH Far-field Microphone Array
This 6CH far-field microphone array is adroit at far-field sound source localization, voice recognition and voice interaction. In comparison to ordinary microphone module,it can implement more advanced functions.
Sound Source Localization
Through the 6-microphone array, high-precision positioning of noise reduction sources is achieved. With radar distance recognition, Hiwonder can be summoned at any location.
TTS Voice Broadcast
The text content published by ROS can be directly converted into voice broadcast to facilitate interactive design.
Voice Interaction
Speech recognition and TTS voice broadcast are combined to realize voice interaction and support the expansion of iFlytek's online voice conversation function.
Voice Navigation
Use voice commands to control Hiwonder to reach any designated location on the map, similar to the voice control scenario of a food delivery robot.
ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.
Gazebo Simulation
JetAcker is built on the Robot Operating System (ROS) and integrates with Gazebo simulation. This enables effortless control of the robot in a simulated environment, facilitating algorithm prevalidation to prevent potential errors. Gazebo provides visual data, allowing you to observe the motion trajectories of each endpoint and center. This visual feedback facilitates algorithm enhancement.
Body Simulation Control
Through robot simulation control, algorithm verification of mapping navigation can be carried out to improve the iteration speed of the algorithm and reduce the cost of trial and error.
Rviz Shows URDF Model
Provide an accurate URDF model, and observe the mapping navigation effect through the Rviz visualization tool to facilitate debugging and improving algorithms.
Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.
High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.
Hall Encoder Geared Motor
520 motor comes with high-accuracy encoder, and features strong force and high performance. The built-in AB phase incremental Hall encoder stands out for its high accuracy and anti-interference ability.
Ackermann Wheel
It has the advantages of high load and no deformation, which prevents the tire from falling due to overweight of the vehicle body, effectively reduces the friction coefficient and mechanical loss, and extends the tire life.
Multi-functional Expansion Board
The expansion board has a built-in IMU sensor which can detects robot posture in real time. There are 2-channel PWM, two keys, a LED, a buzzer, 9-channel serial bus servo interface, two GPIO expansion ports and two IIC interfaces on it.
Lithium Battery Parameters
The fuselage has a built-in 11.1V 6000mAh large-capacity lithium battery to improve the robot's endurance.
ROS in-depth development Able to overcome obstacles
Autonomous driving research
Pendulum suspension for stable driving 360° omnidirectional movement
Grabbing and transporting
Specification Parameters
Size:
316*259*242mm
Weight:
4.8kg
Material:
Full-metal hard aluminum alloy bracket
Battery:
11.1V 6000mAh Lipo battery
Continuous working life:
90min
Hardware:
ROS controller and ROS expansion board
Operating system:
Ubuntu 18.04 LTS + ROS Melodic
Software:
iOS/ Android app
Communication:
USB/ WiFi/ Ethernet
Programming language:
Python/ C/ C++/ JavaScript
Storage:
32GB TF card
Servo:
HTS-20H serial bus servo
Control method:
Phone/ Handle control
Package size (advanced kit):
38*31*23cm
Package weight (advanced kit):
About 5kg
Product Parameters
Dimensional Diagram
SLAMTEC A1 Lidar Parameters
EAI G4 Lidar Parameters
Depth Camera Parameters
6CH Far-Field Microphone Array Parameters
7-inch LCD Screen Parameters
HTS-20H Servo Parameters
Abundant Learning Materials
JetAcker Starter Packing List
JetAcker Standard Packing List
JetAcker Advanced Packing List
JetAcker Ultimate Packing List
FAQ
What powers JetAcker and what software does it support?
It is powered by NVIDIA Jetson Nano B01 and runs ROS. It supports mainstream deep learning frameworks, MediaPipe development, YOLO model training, and TensorRT acceleration.
What are the main steering and suspension features?
The chassis uses an Ackermann Steering Structure with a full metal CNC steering system and pendulum suspension for stability. The rear wheels remain parallel and turning is achieved by the difference in inner and outer wheel angles.
What sensing and AI capabilities does it include?
It includes LiDAR for SLAM mapping and navigation, and a 3D depth camera for 3D vision. It also supports AI features such as KCF target tracking, color and tag recognition, and YOLO object recognition.
What is the intended use and development environment?
JetAcker is designed for robotics education and research, enabling learning and validating SLAM, mapping, and AI vision algorithms. It integrates with ROS and Gazebo simulation for algorithm prevalidation.
What is the battery life and is warranty information provided?
The robot uses an 11.1V 6000mAh lithium battery with up to 90 minutes of continuous operation. Warranty details are not provided in the product information.
Reviews
No reviews yet. Be the first to share your experience!