










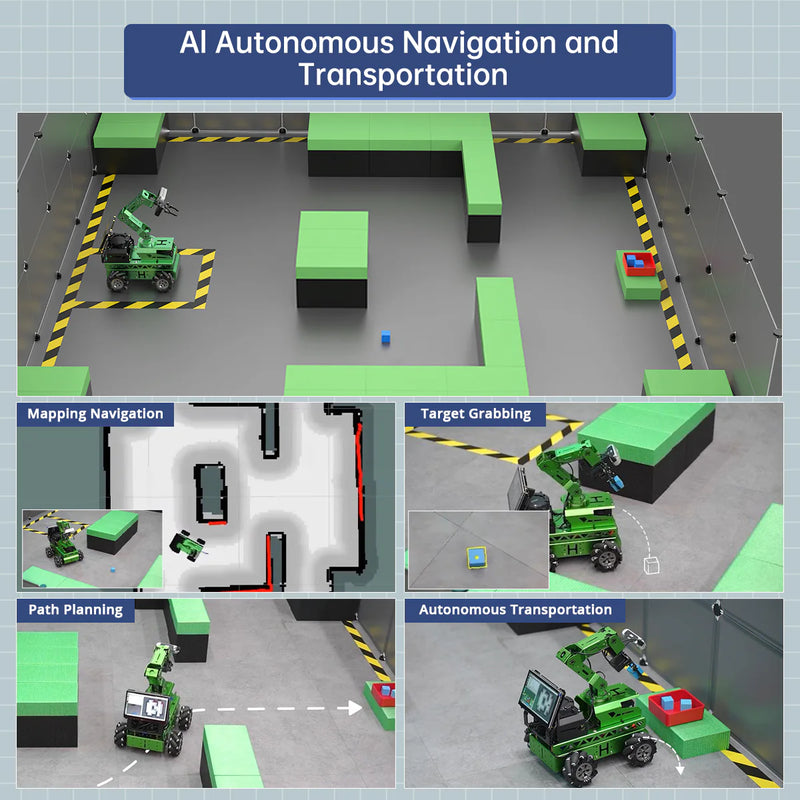


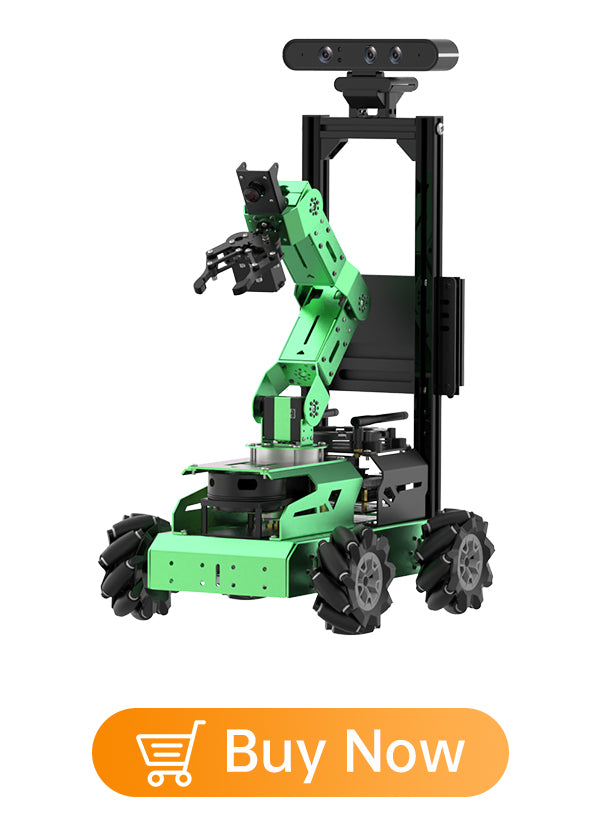
JetRover is a composite ROS robot developed by Hiwonder for ROS education scenarios. It supports three motion chassis: Mecanum wheel, Ackerman steering, and crawler. It is equipped with NVIDIA Jetson Nano, high-performance magnetic encoding motor, and 6-degree-of-freedom robotic arm. High-performance hardware configurations such as lidar, 3D depth camera, 7-inch LCD screen, and far-field microphone array can realize robot motion control, mapping navigation, path planning, tracking and obstacle avoidance, autonomous driving, 3D grabbing, navigation and handling, and somatosensory Interaction, far-field voice interaction, group control formation and other applications.
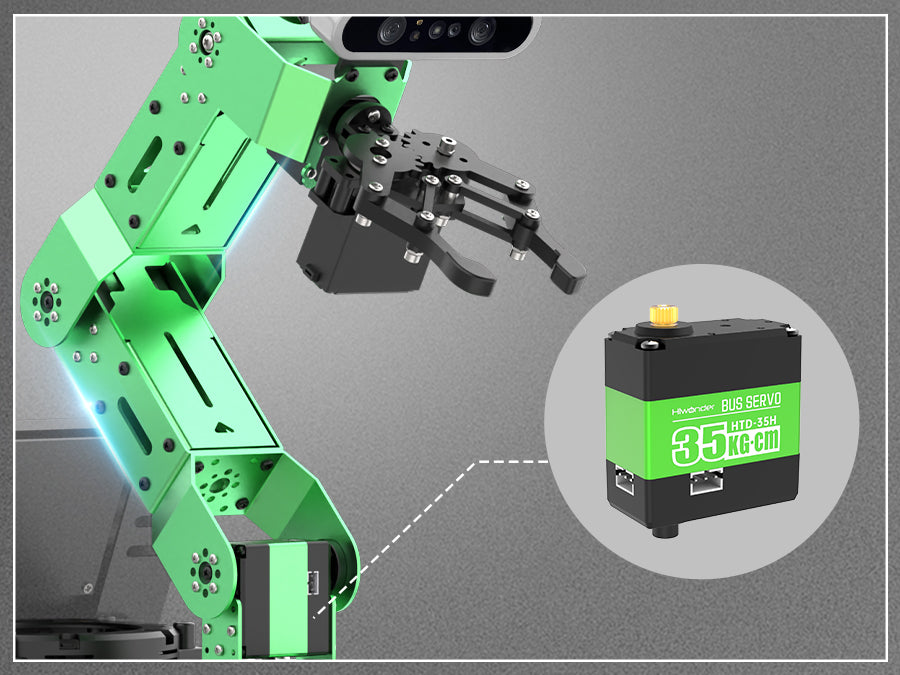
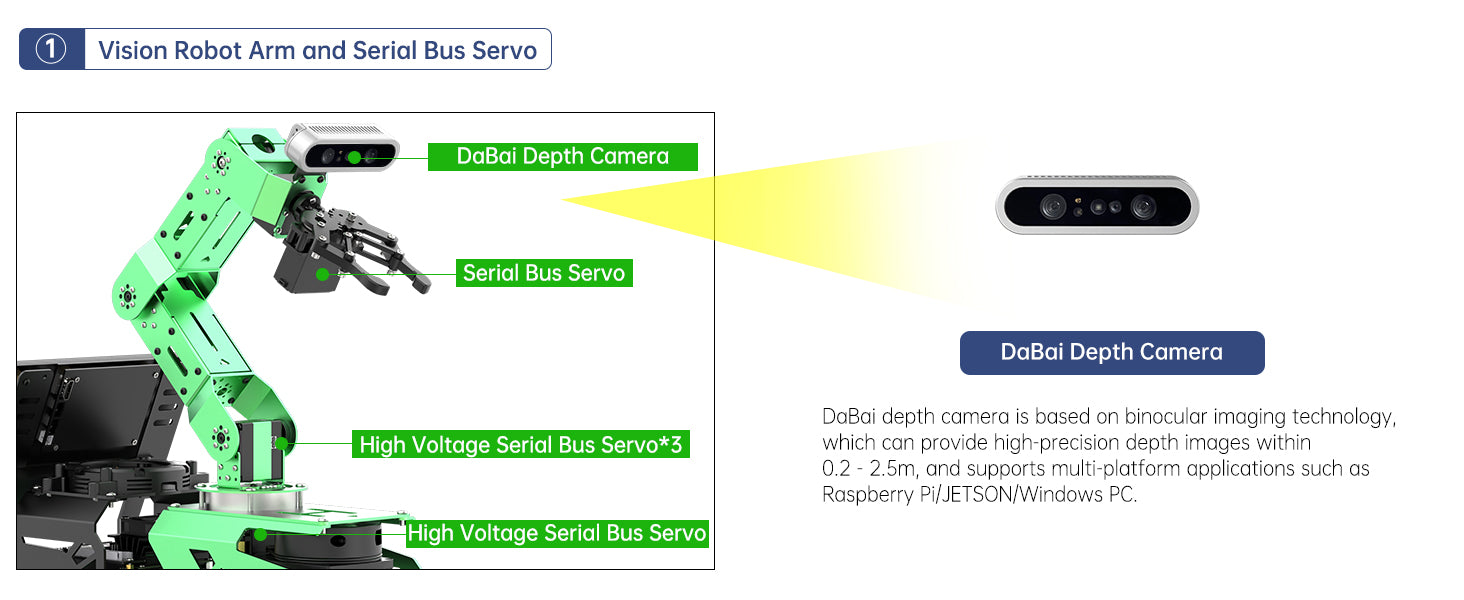
6DOF Robot Arm, Intelligent Bus ServoJetRover is equipped with a 6DOF robot arm and a high-torque bus high-voltage servo, which greatly extends the robot's endurance. |
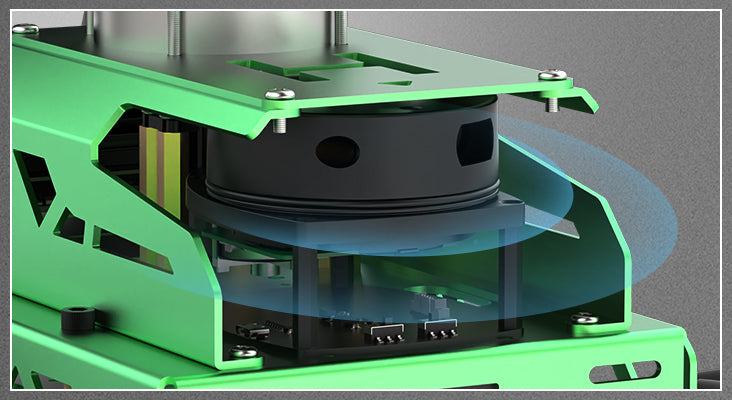
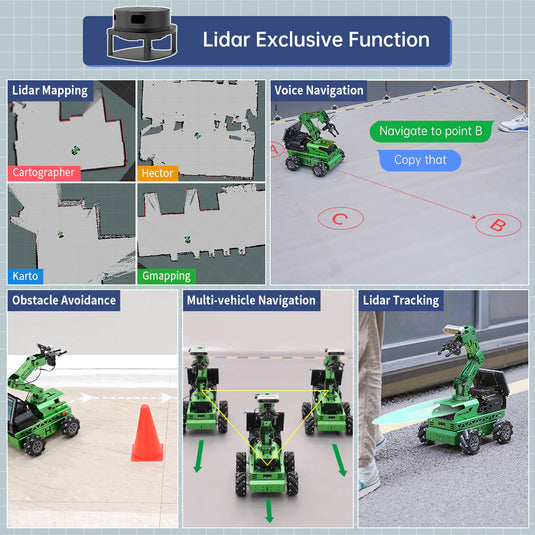
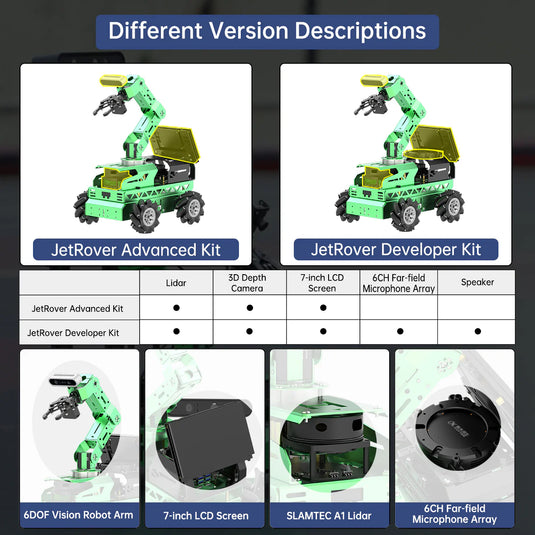
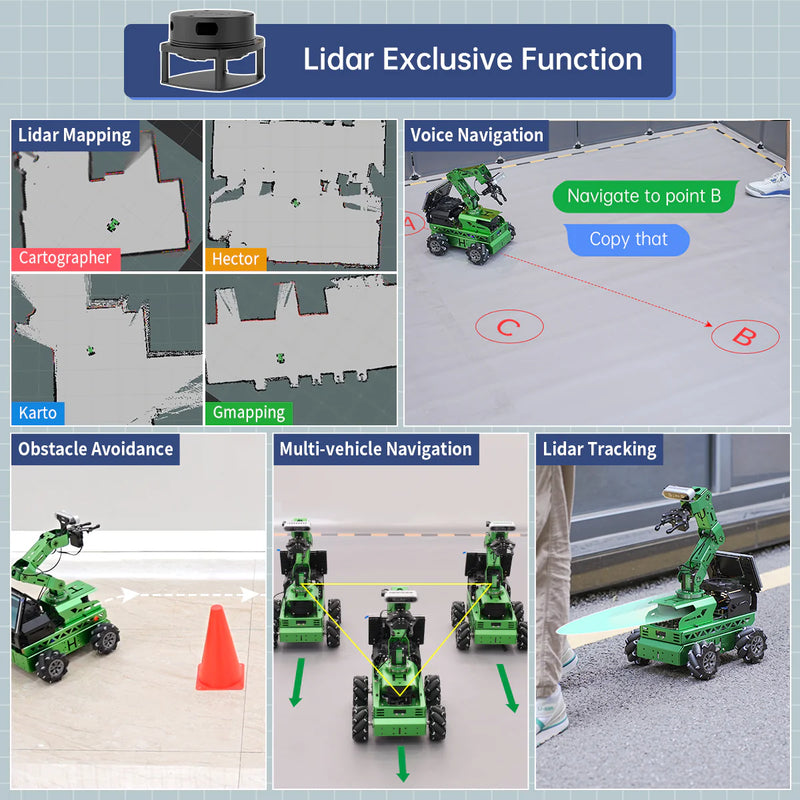
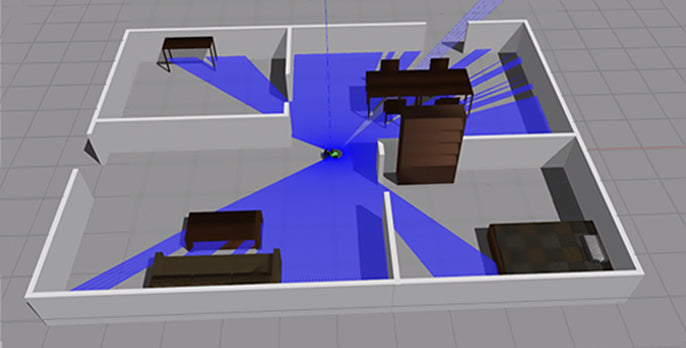
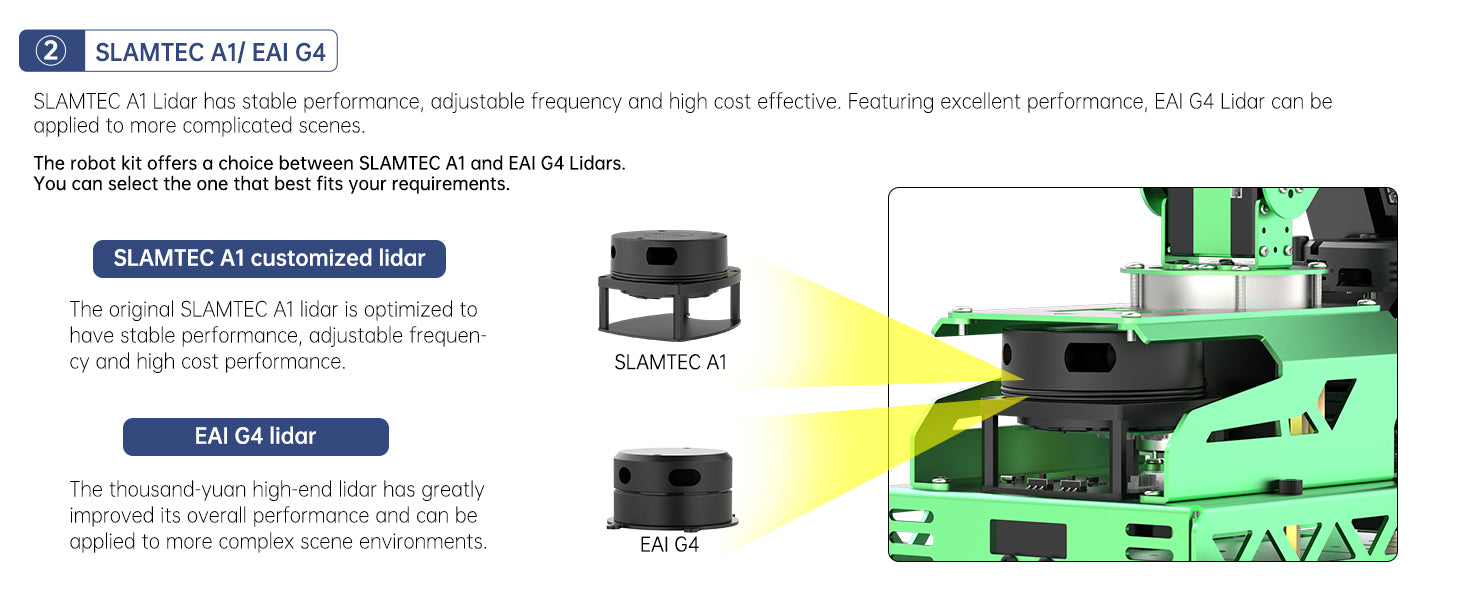
LiDAR SLAM Mapping NavigationJetRover is equipped with lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoldance. |

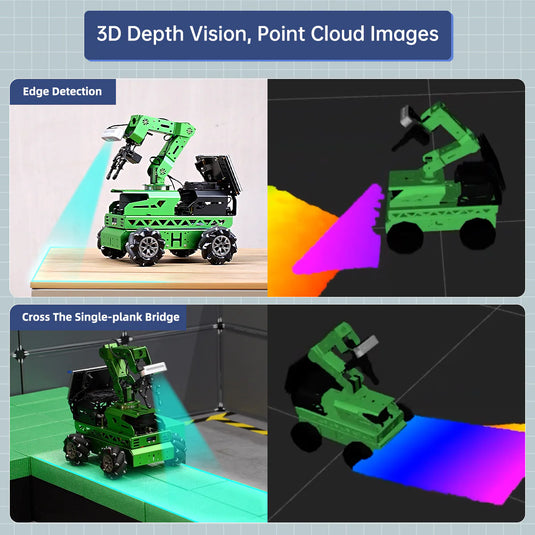
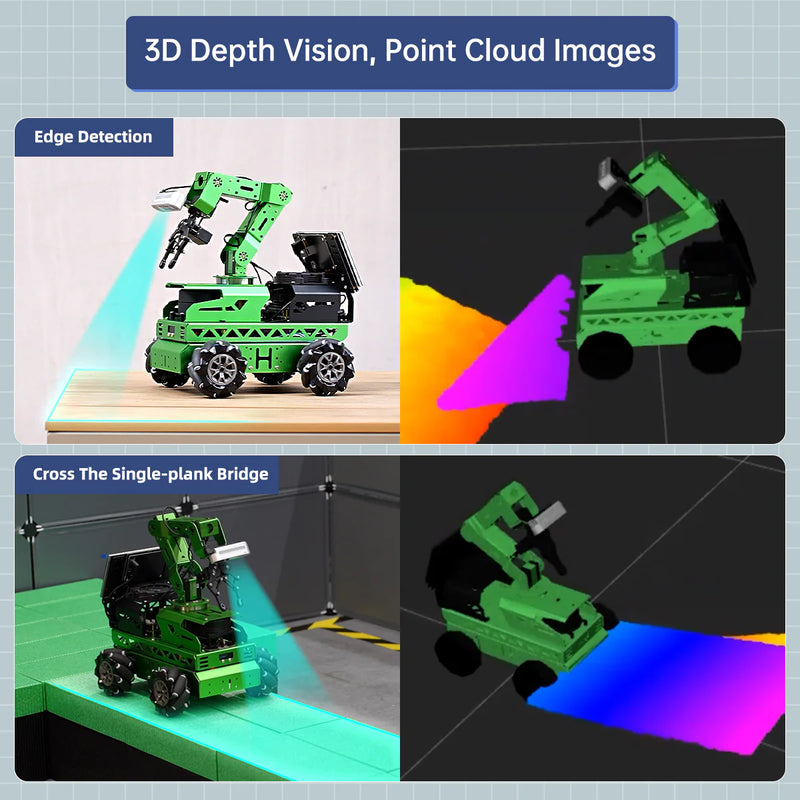
Depth Vision First-Person ViewJetRover is equipped with a 6-degree-of-freedom robotic arm, equipped with a high-performance 3D depth camera at the end, which can realize target recognition, tracking and grabbing. |

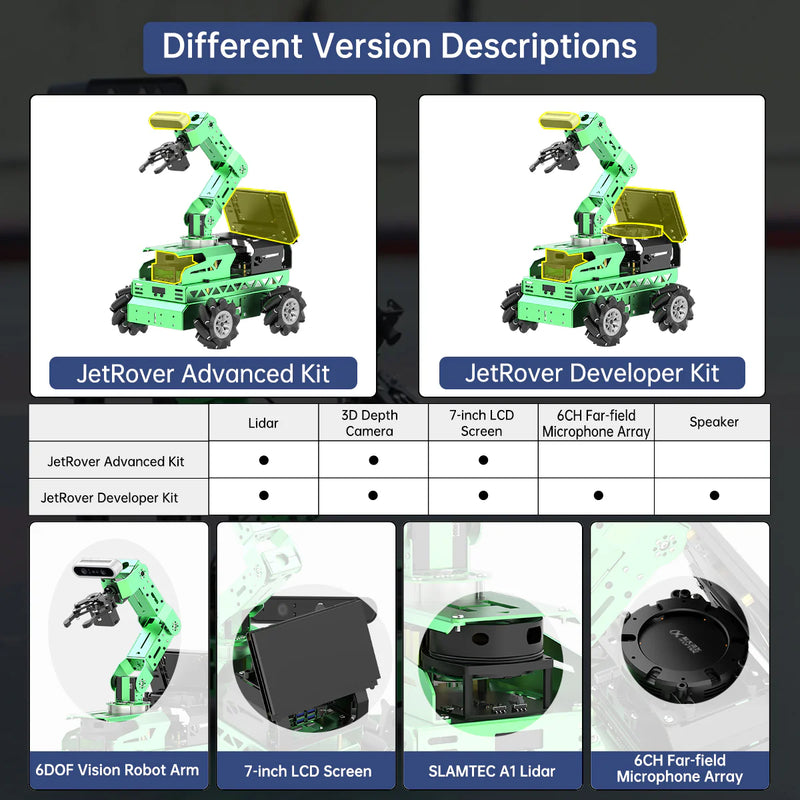
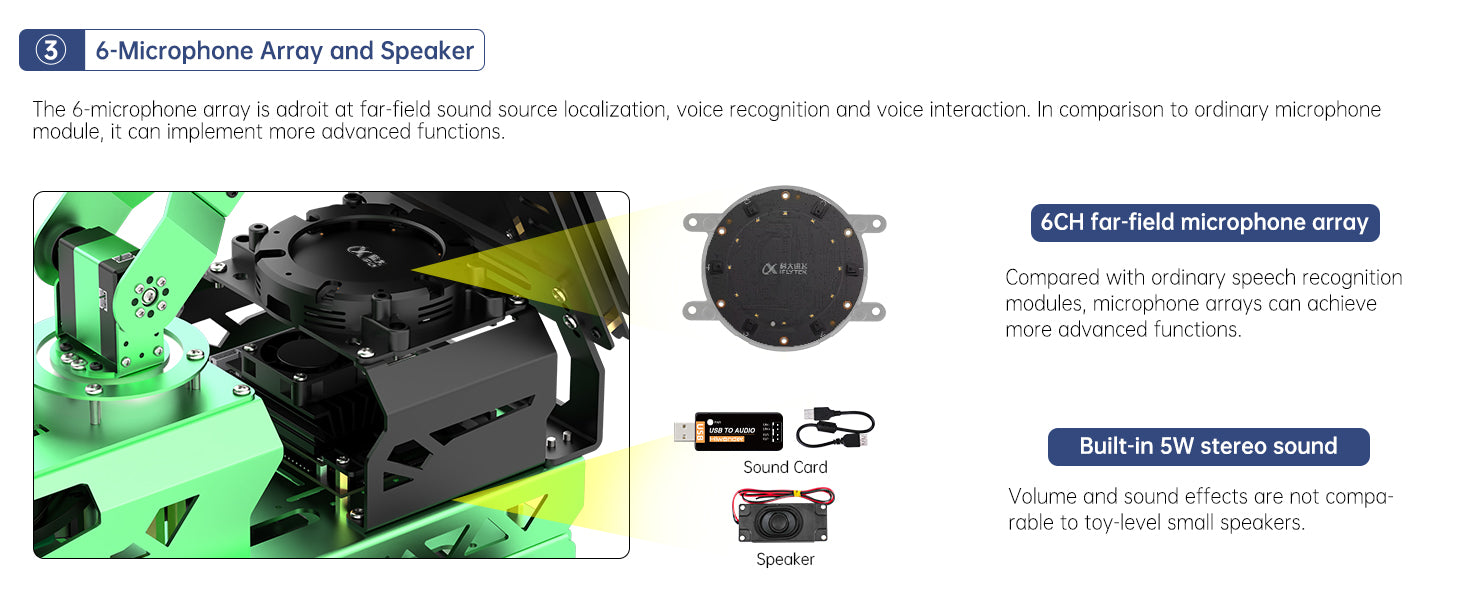
6CH Far-field Microphone ArrayThe 6CH Far-field Microphone Array and speakers support sound source positioning, voice recognition control, voice navigation and other functions. |
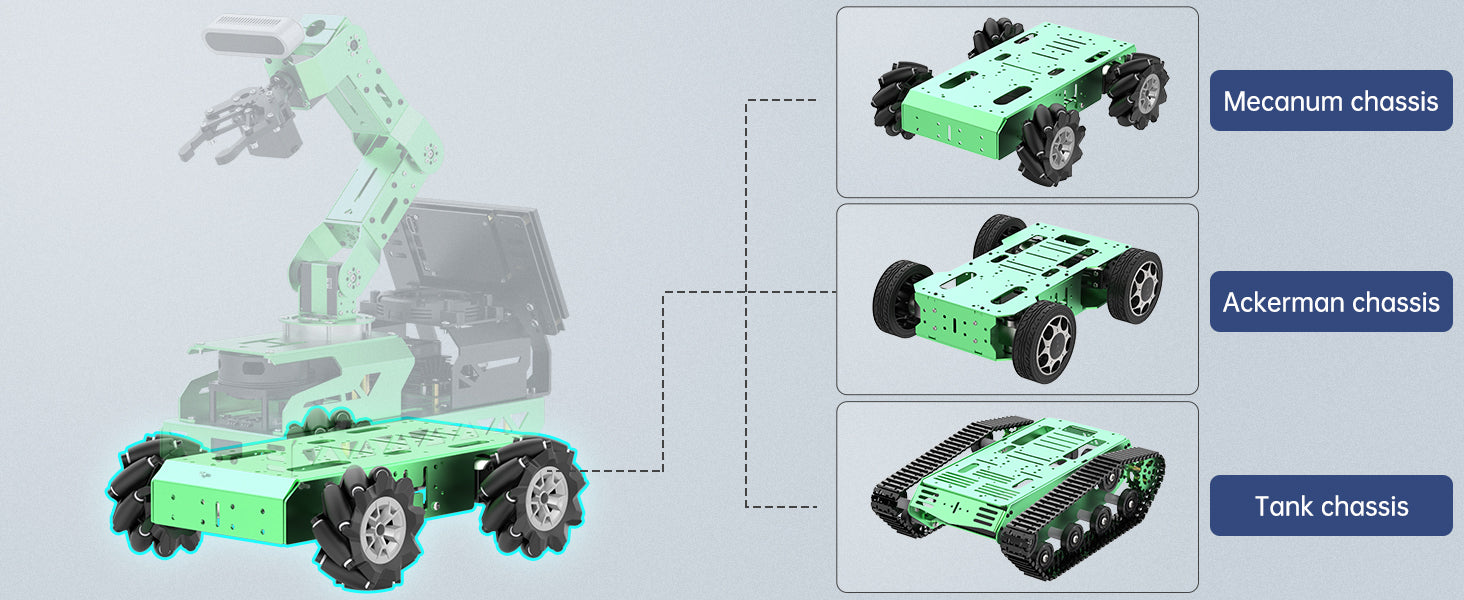
Supports Multiple Chassis Expansions






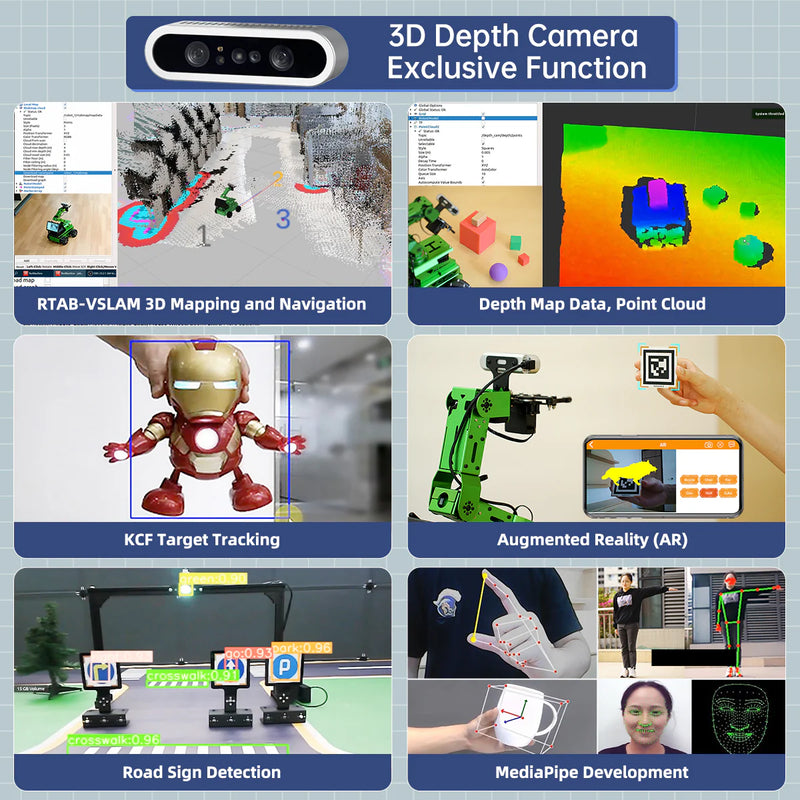
AI Vision Interaction
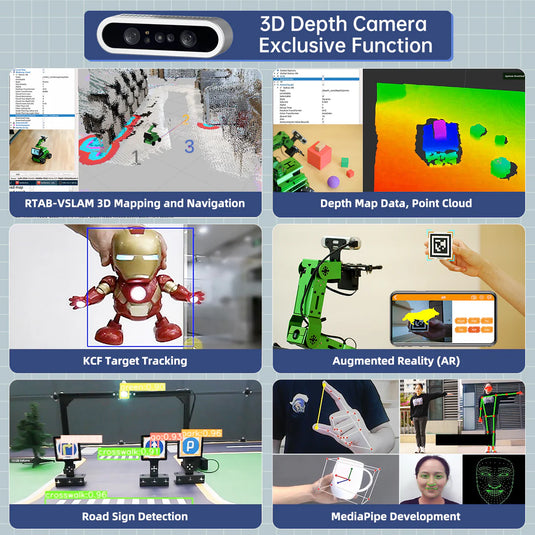
By inorporating artificial intelligence, JetRover can implement KCF target tracking, AI deep learning, color/ tag recognition and tracking, AR augmented reality, etc.

KCF Target TrackingRelying on KCF filtering algorithm, the robot can track the selected target. |

Vision Line FollowingJetRover supports custom color selection, and the robot can identify color lines and follow them. |
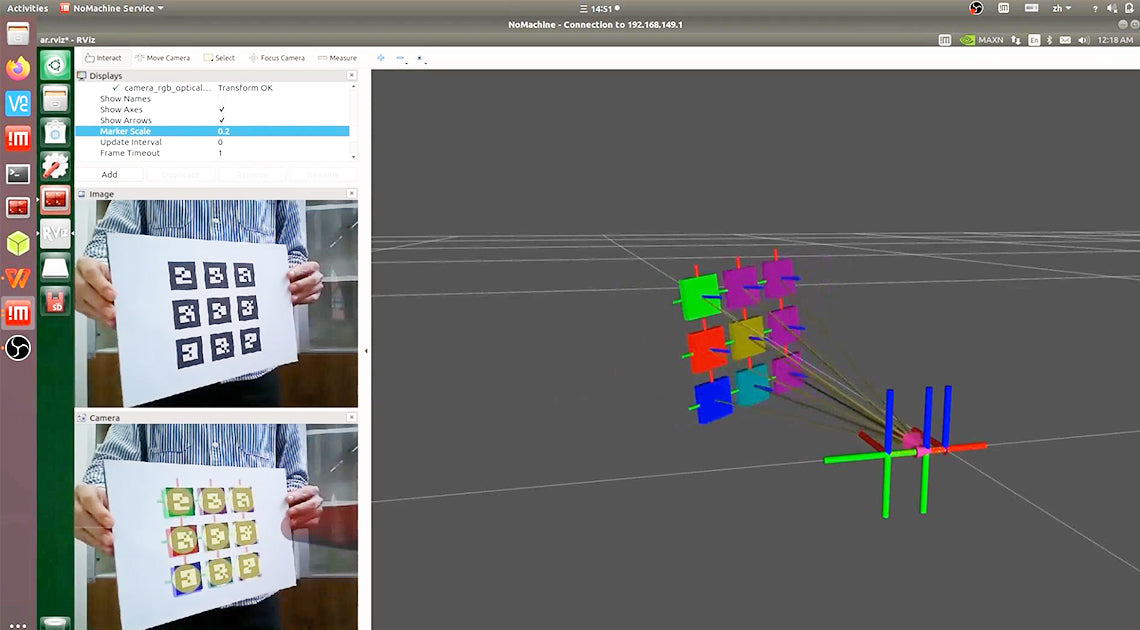
Color Recognition and TrackingJetRover is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates at the same time. |

AR Augmented RealitySelect the corresponding graphics through the APP, and let the graphics be presented on the April Tag code through AR enhancement technology. |

MediaPipe Development, Upgraded AI InteractionJetRover is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates at the same time. |
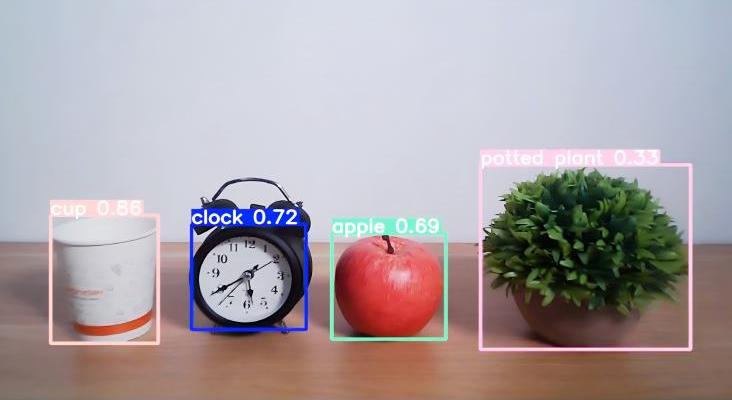
AI Deep Learning FrameworkUtilize YOLO network algorithm and deep learning model library to recognize the objects. |


Sound Source LocalizationThrough the 6-microphone array, high-precision positioning of noise reduction sources is achieved. With radar distance recognition, Hiwonder can be summoned at any location. |

TTS Voice BroadcastThe text content published by ROS can be directly converted into voice broadcast to facilitate interactive design. |

Voice InteractionSpeech recognition and TTS voice broadcast are combined to realize voice interaction and support the expansion of iFlytek's online voice conversation function. |

Voice NavigationUse voice commands to control Hiwonder to reach any designated location on the map, similar to the voice control scenario of a food delivery robot. |

ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.

Gazebo Simulation
JetRover employs ROS framework and supports Gazebo simulation. Gazebo brings a fresh approach for you to control JetRover and verify the algorithm in simulated environment, which reduces experimental requirements and improves efficiency.
Body Simulation ControlThrough robot simulation control, algorithm verification of mapping navigation can be carried out to improve the iteration speed of the algorithm and reduce the cost of trial and error. |
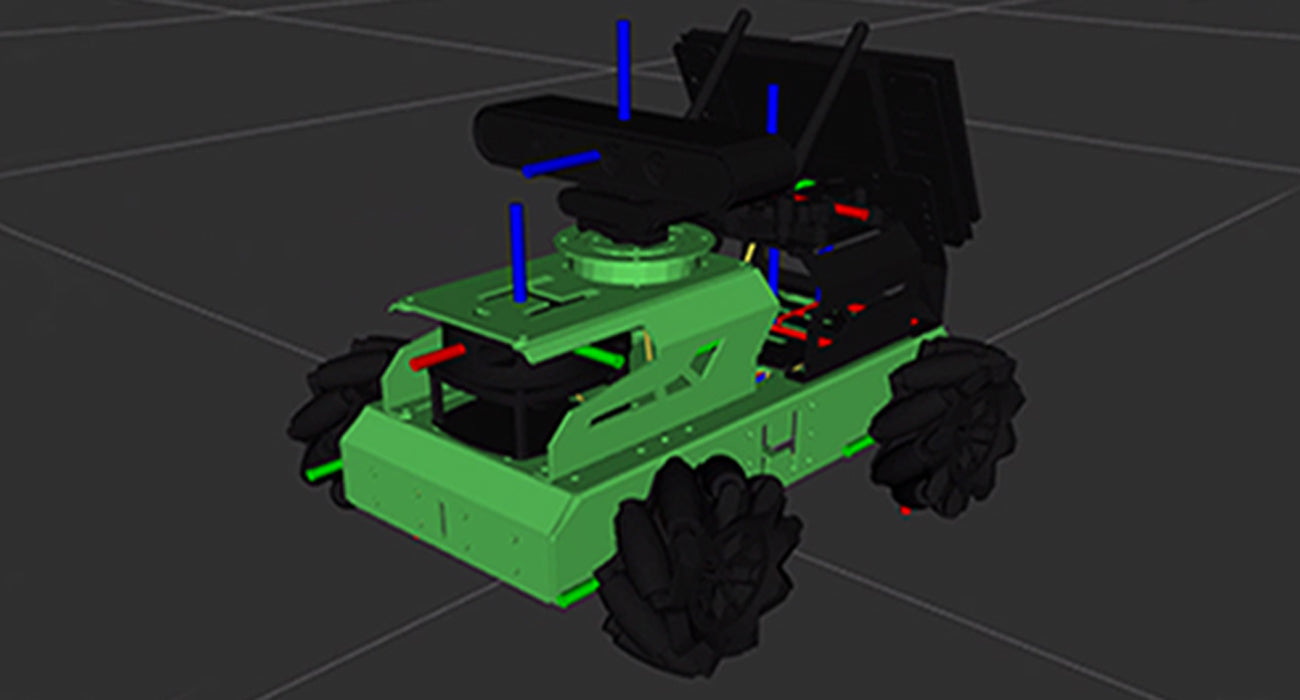
Visual DataRViz can visualize the mapping and navigation result, which facilitates debugging and improving algorithm. |



Wrapped Rear Tail ShellIt can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor. |
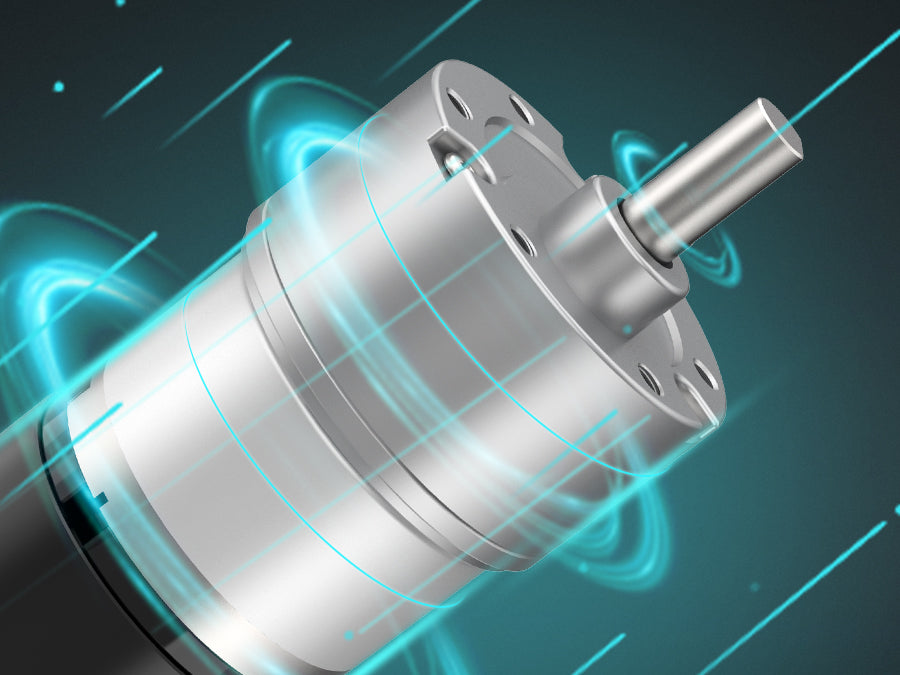
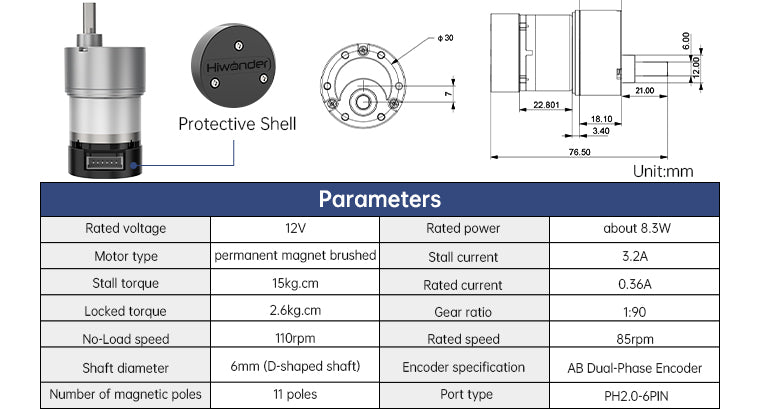
Permanent Magnet Brushed MotorThe permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change. |

High-precision Magnetic EncoderThe motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability. |
Adapt to Various ScenesThe low speed of 1:90 reduction ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials. |
Hall Encoder Geared Motor520 motor comes with high-accuracy encoder, and features strong force and high performance. The built-in AB phase incremental Hall encoder stands out for its high accuracy and anti-interference ability. |
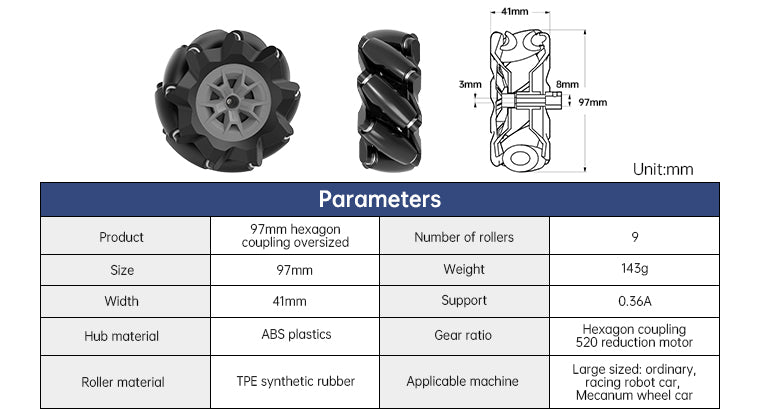
Mecanum WheelThe mecanum wheel has a compact structure and flexible movement, supports 360° all-round movement, and realizes the full lateral movement of the car. |
 |
 |
 |
 |
|
|---|---|---|---|---|
| JetTank | JetAcker | JetAuto | JetAuto Pro | |
| Chassis | Tracked chassis | Ackerman steering structure | Pendulum suspension chassis | Pendulum suspension chassis |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Motor | 520 Motor*2 | 520 Motor*2 | 520 Motor*4 | 520 Motor*4 |
| Servo | Intelligent servo*1 | Intelligent servo*2 | Intelligent servo*1 | Intelligent servo*5 |
| Camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera and monocular camera |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Lidar | SLAMTEC A1/ EAI G4 | |||
| Robot Arm | / | / | / | Monocular vision robotic arm |
| Features | ROS in-depth development Able to overcome obstacles | Autonomous driving research | Pendulum suspension for stable driving 360° omnidirectional movement | Grabbing and transporting |
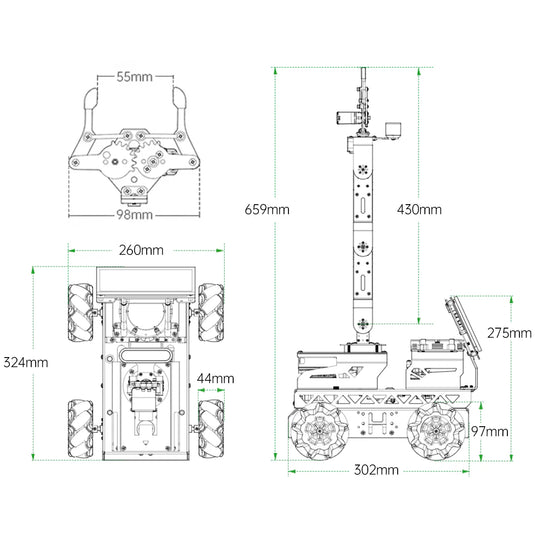
Specification Parameters
|
|
||||||||||||||||||||||||||||||||||||||||||||||
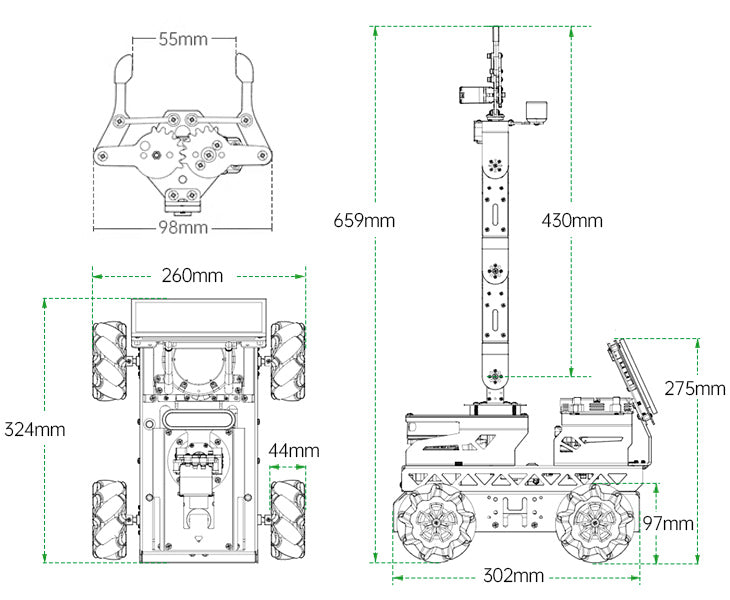
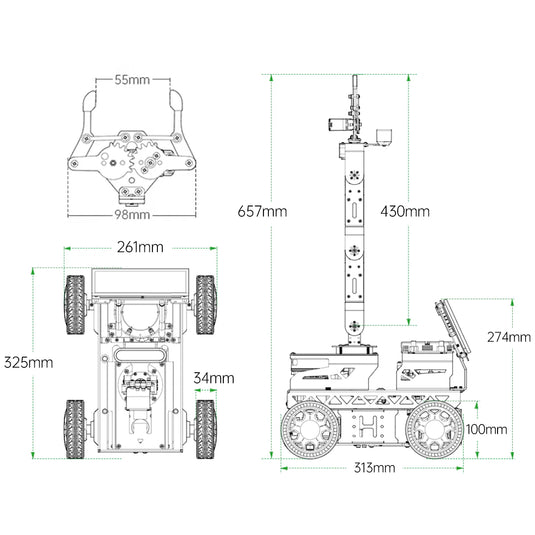
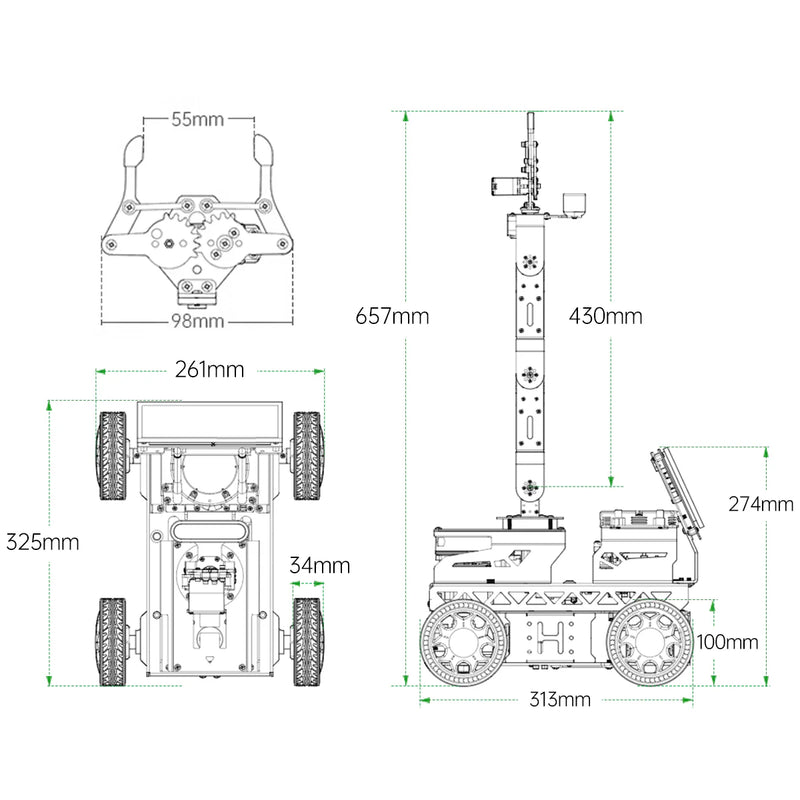
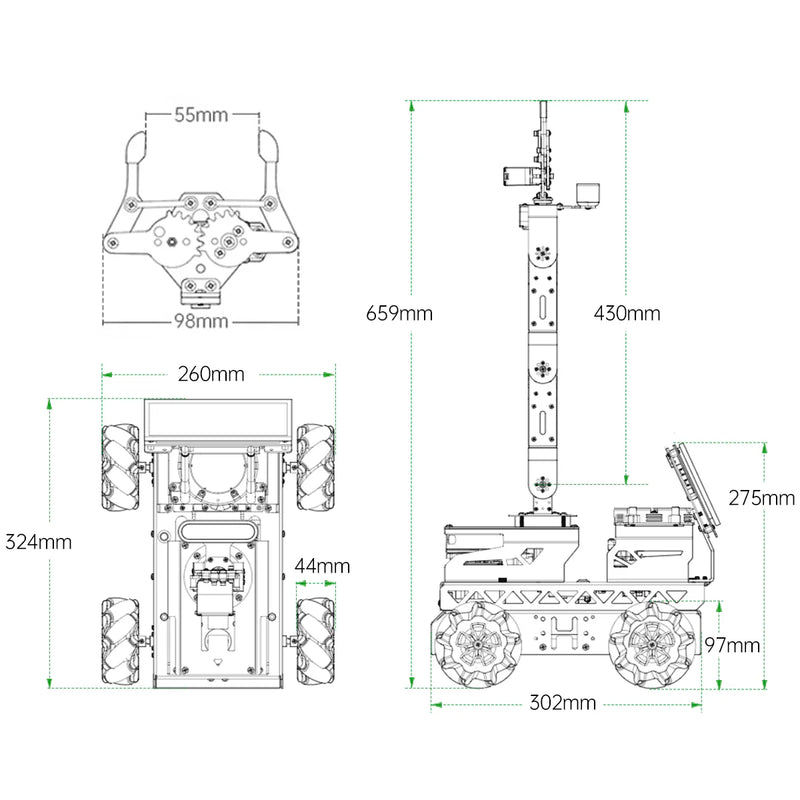
JetRover M1 |
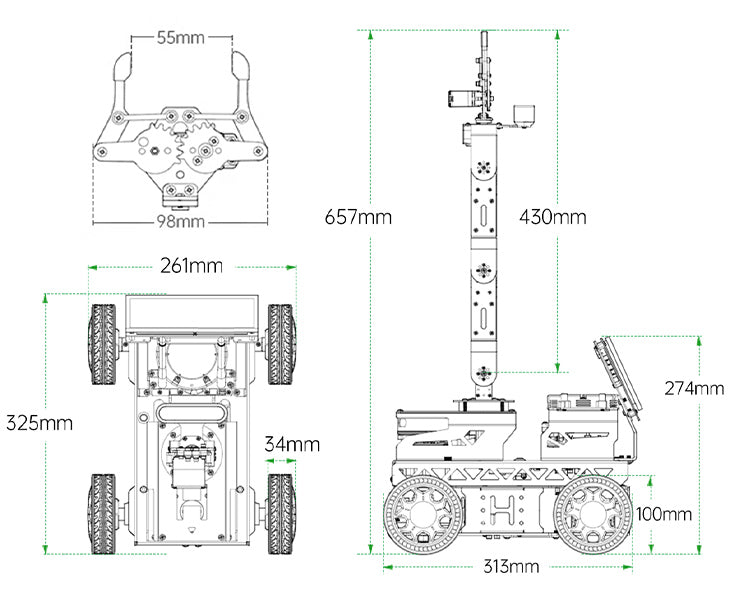
JetRover A1 |
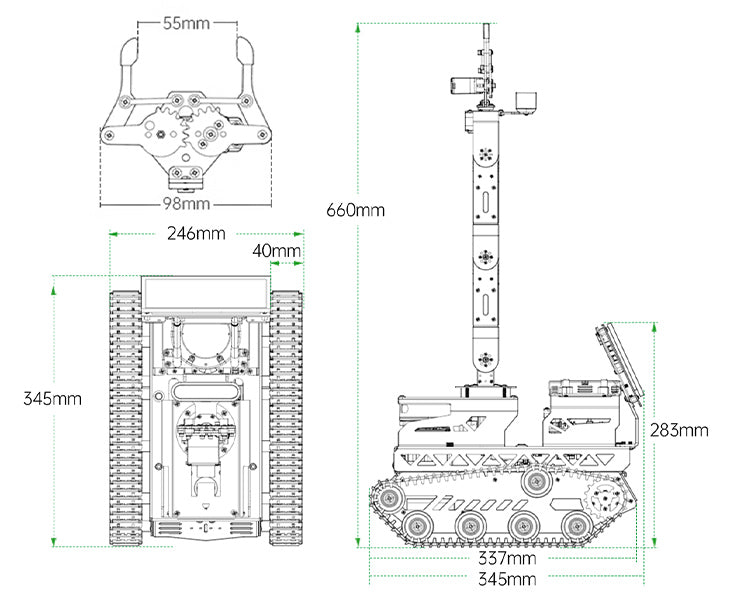
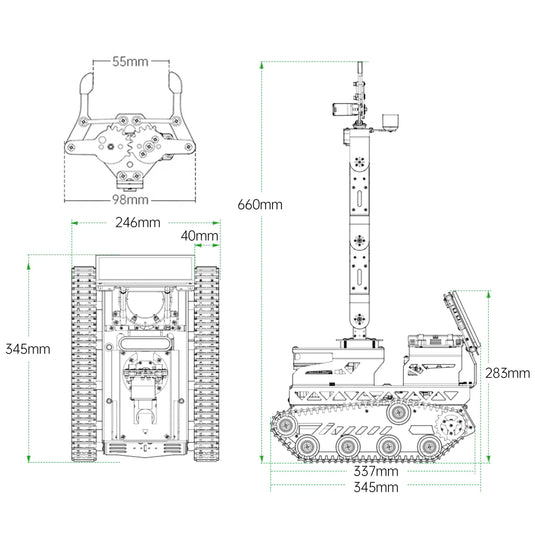
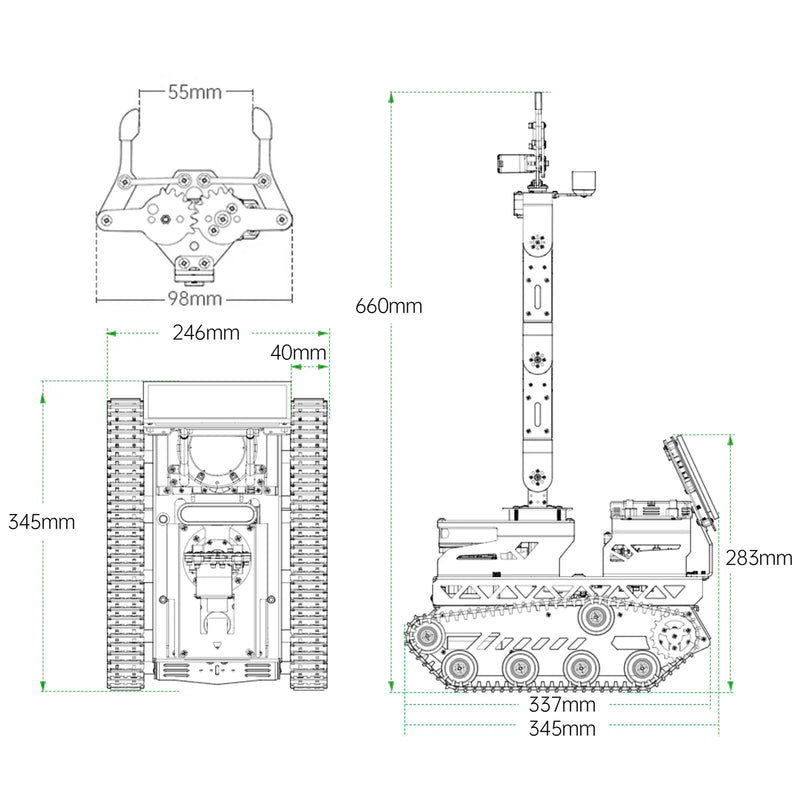
JetRover T1 |
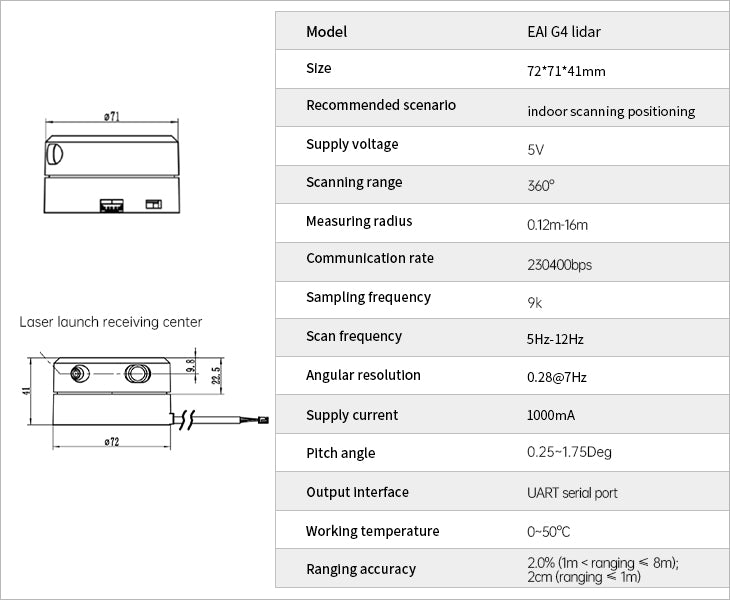
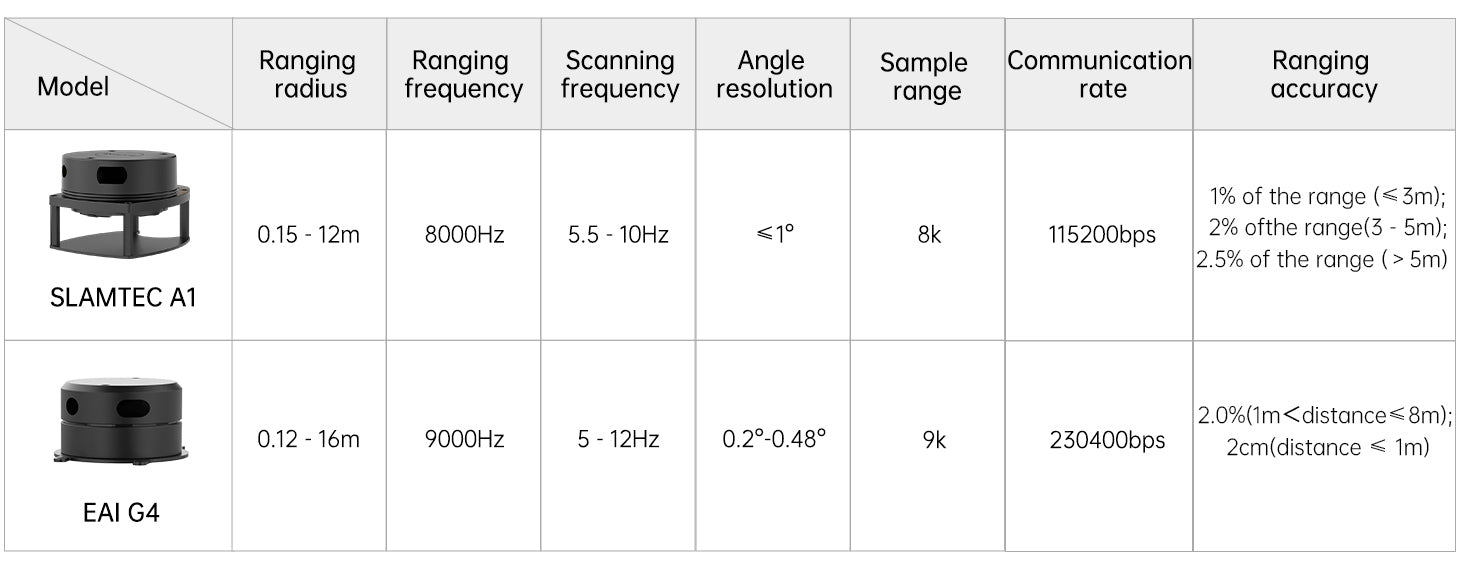
EAI G4 Lidar Parameters |
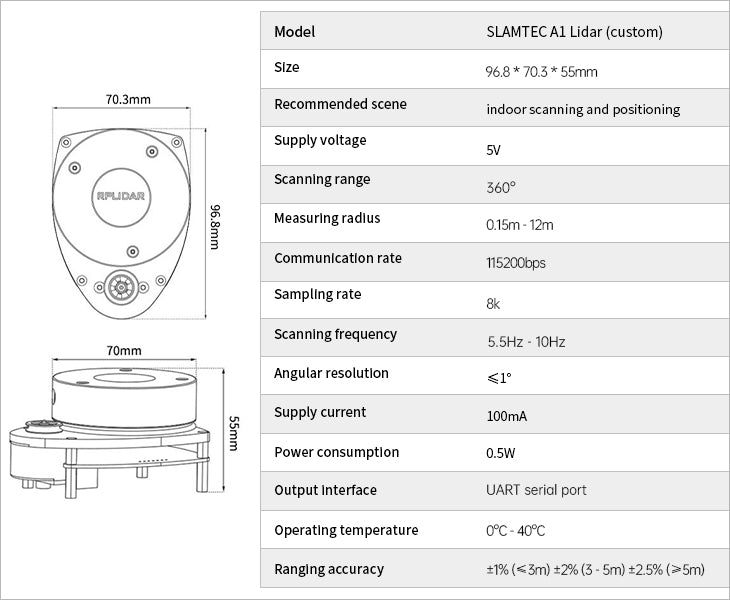
SLAMTEC A1 Lidar Parameters |
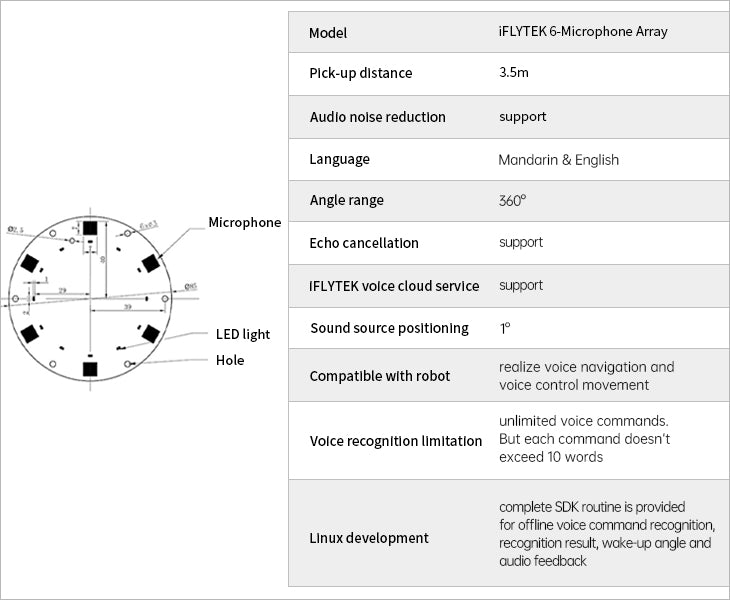
6-Microphone Array Parameters |
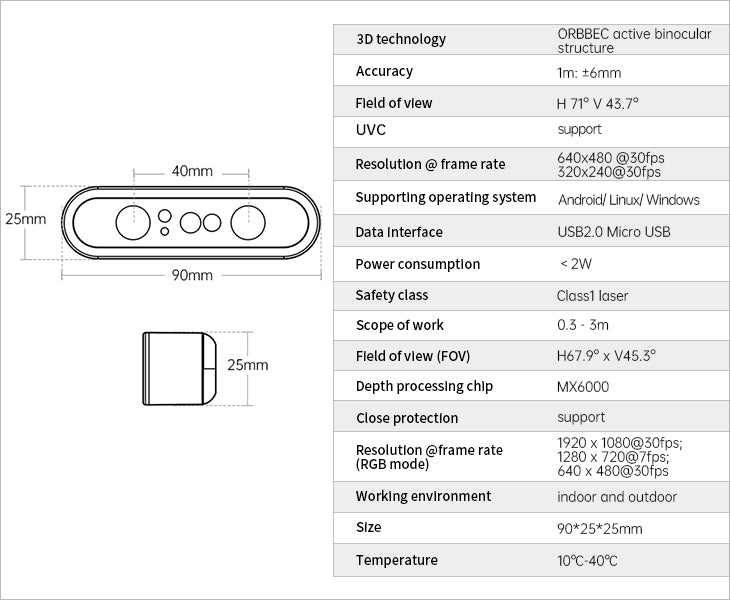
Depth Camera Parameters |
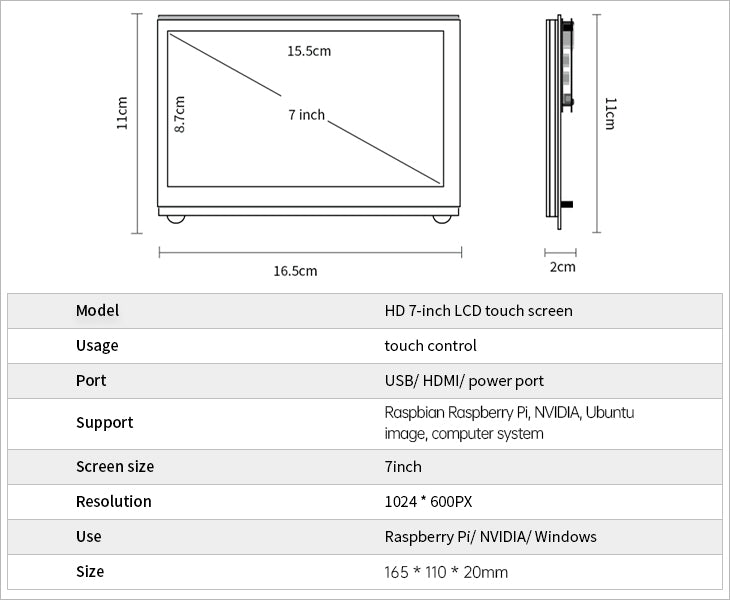
7-inch LCD Screen Parameters |
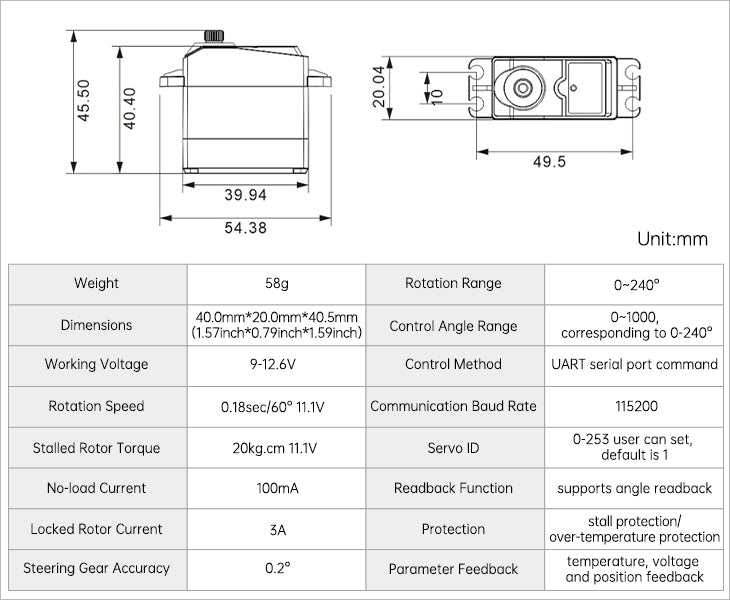
HTS-20H Servo Parameters |
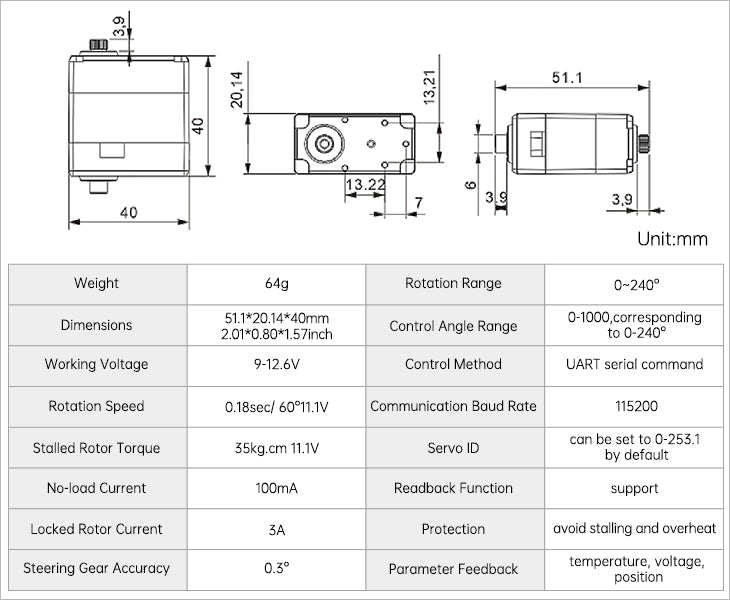
HTD-35H Servo Parameters |
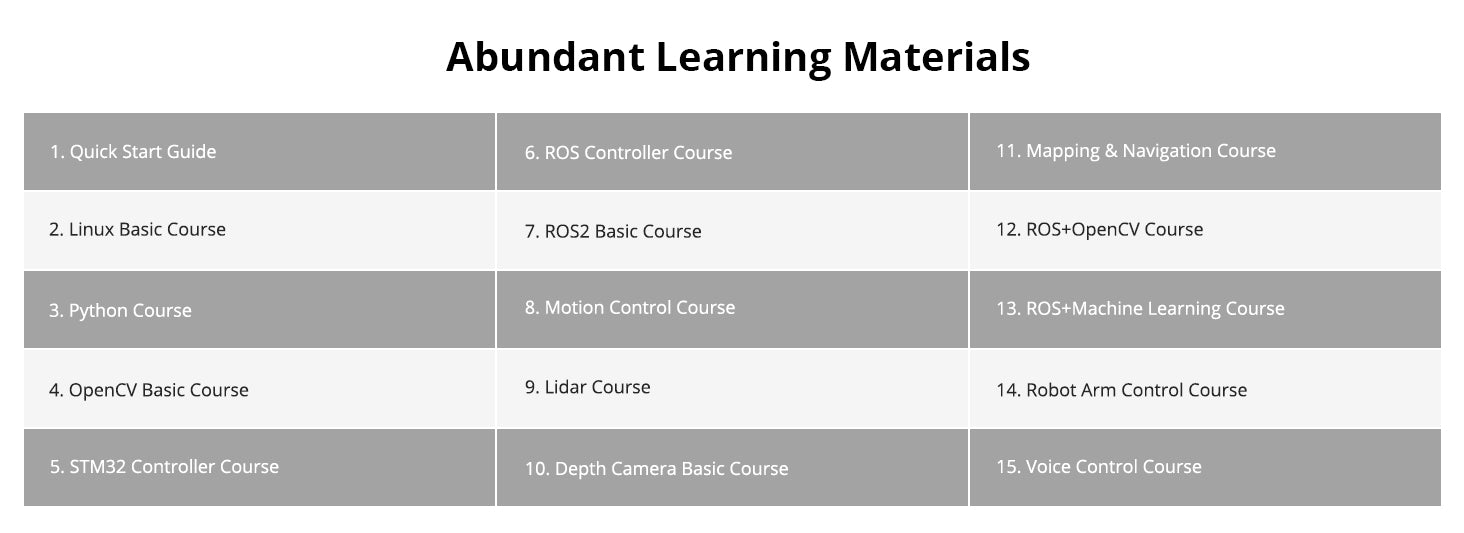
Abundant Learning Materials
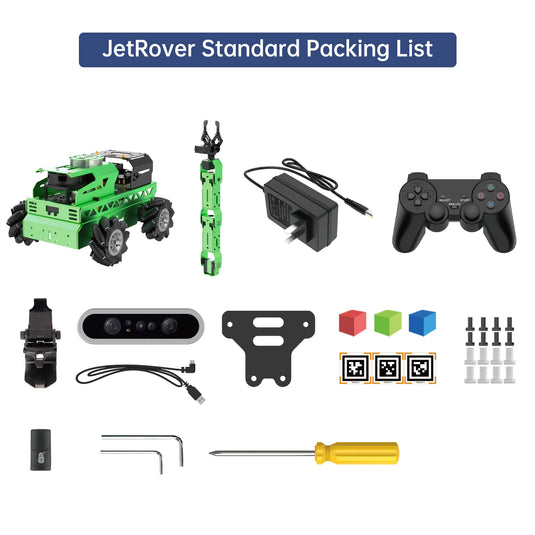
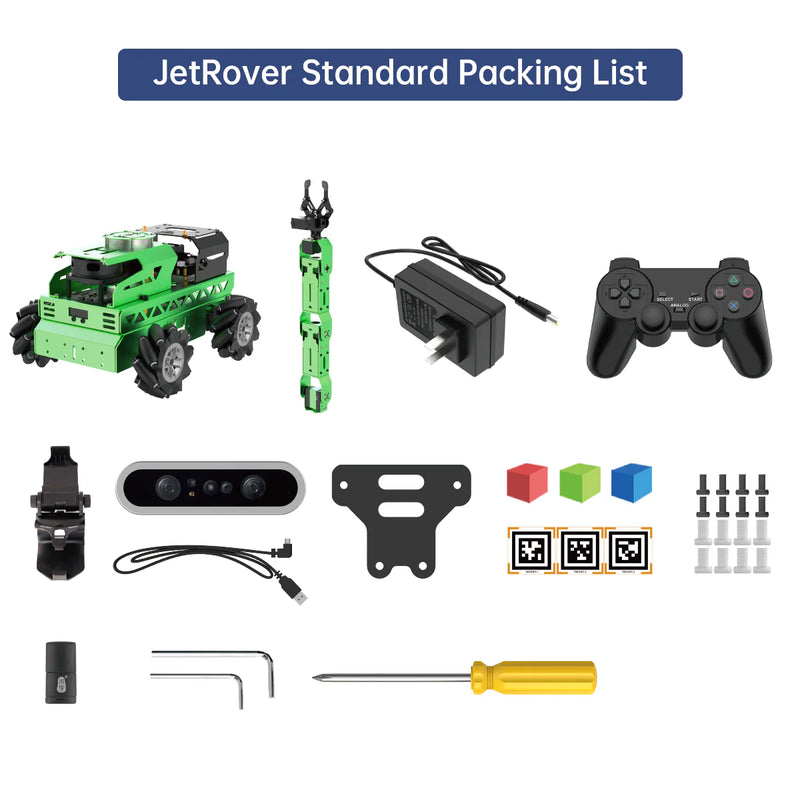
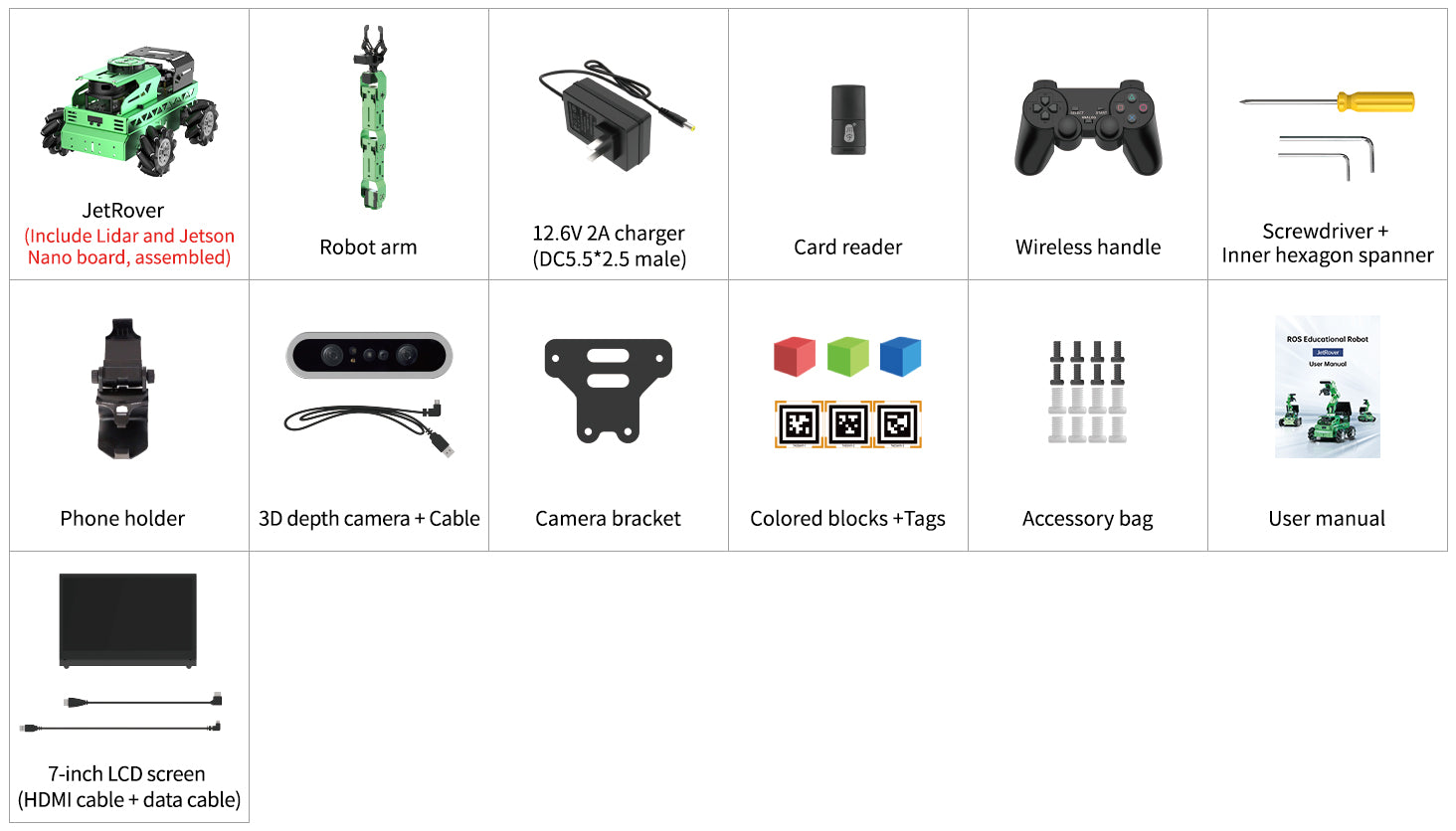
JetRover Standard Packing List
Notice:The packing list takes the mecanum wheel chassis as an example. Users can choose Ackerman or tank chassis. All other accessories are the same except for the chassis.
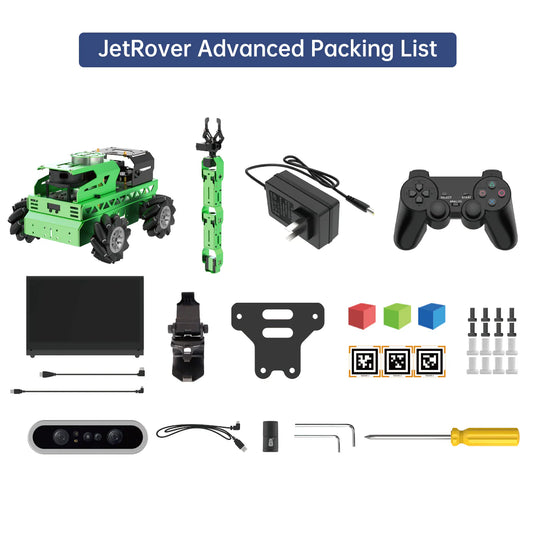
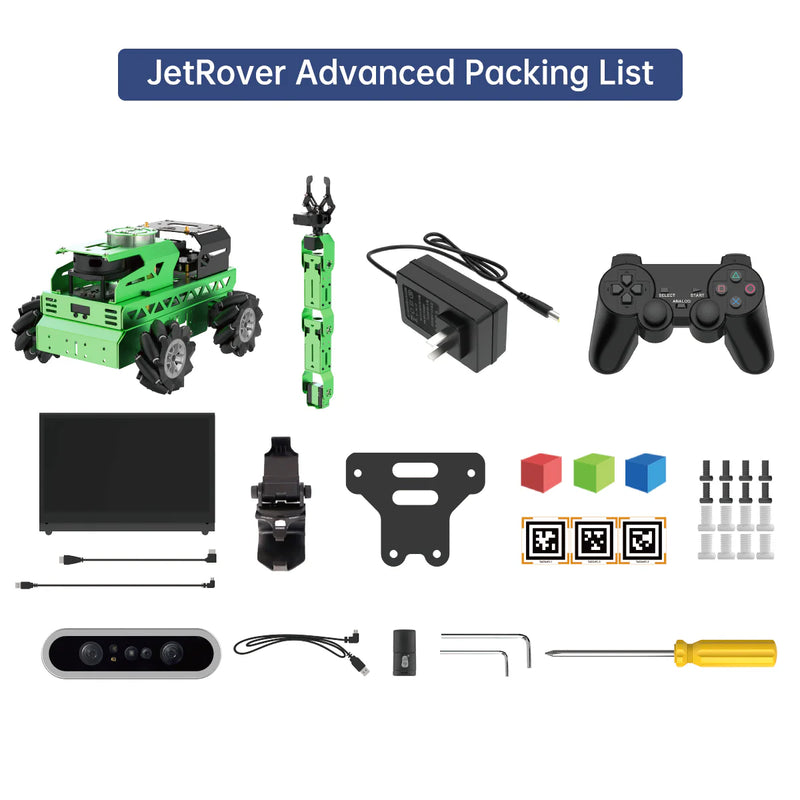
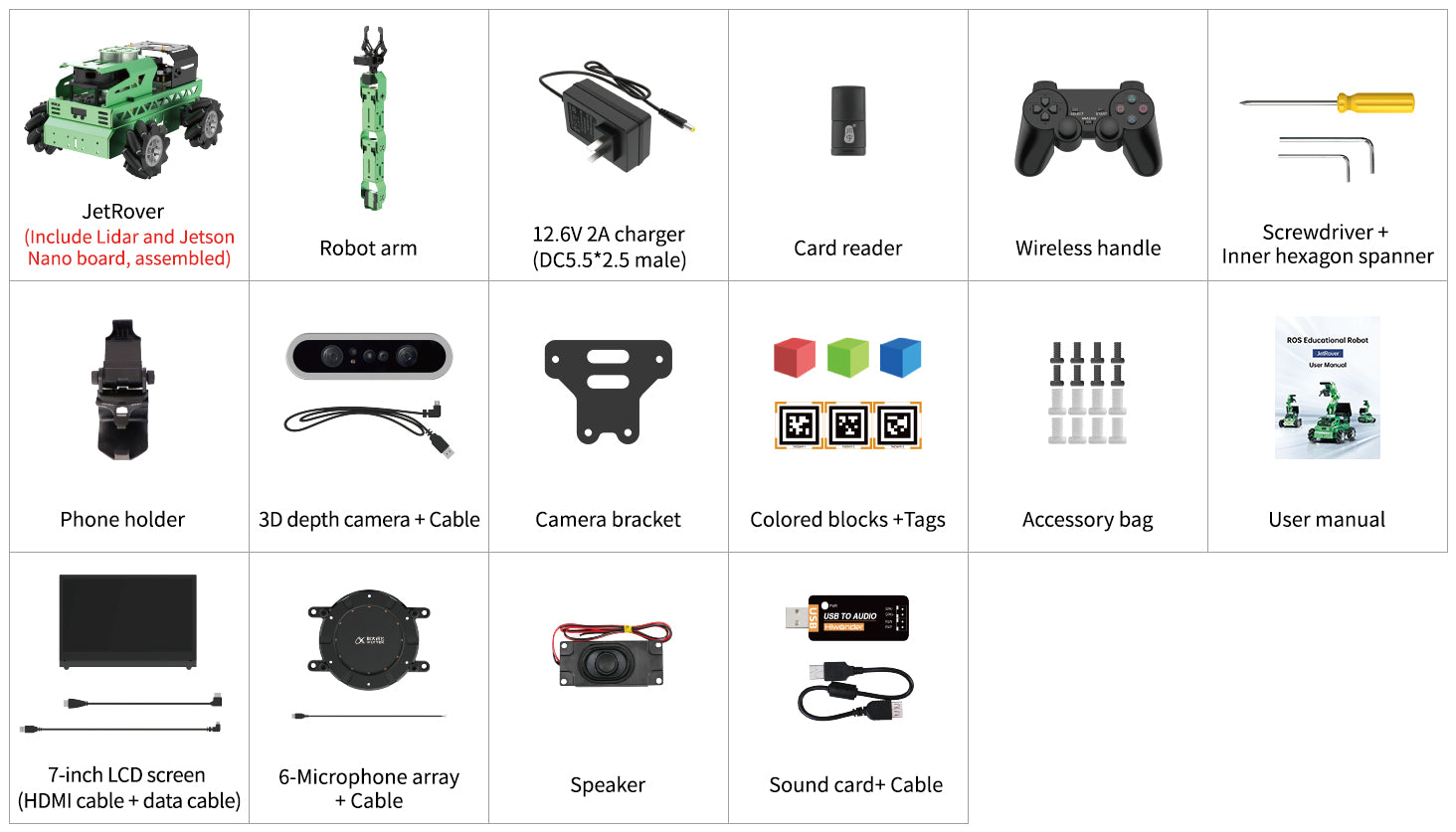
JetRover Advanced Packing List
Notice:The packing list takes the mecanum wheel chassis as an example. Users can choose Ackerman or tank chassis. All other accessories are the same except for the chassis.
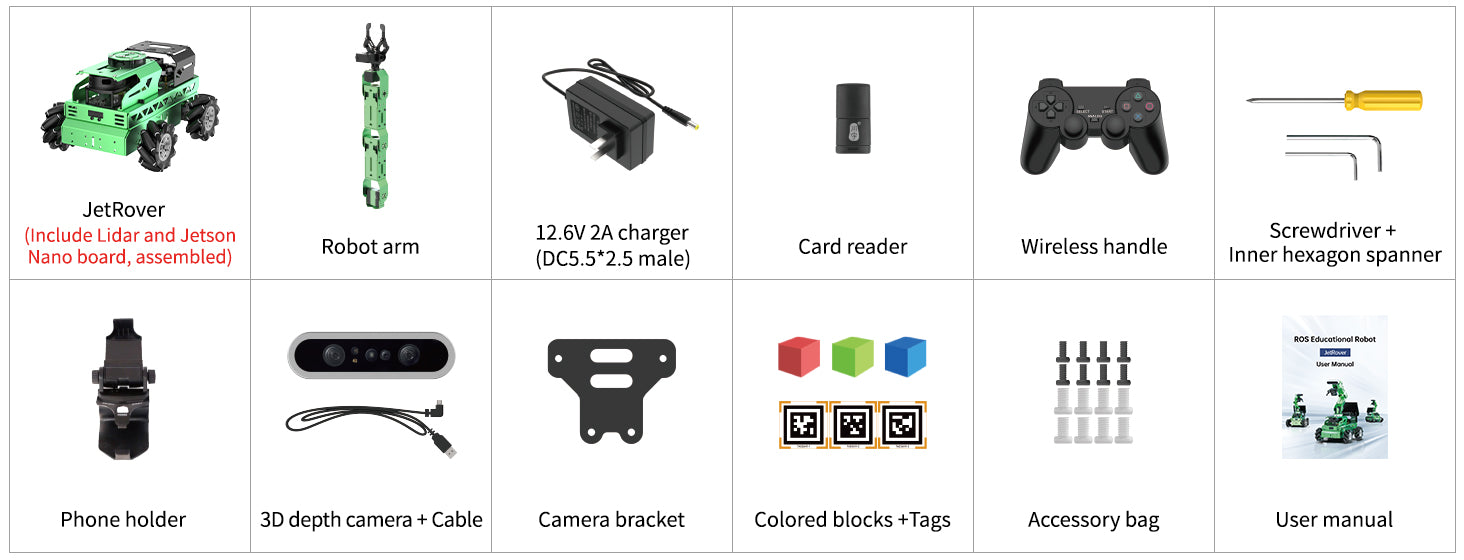
JetRover Developer Packing List
Notice:The packing list takes the mecanum wheel chassis as an example. Users can choose Ackerman or tank chassis. All other accessories are the same except for the chassis.
Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.
