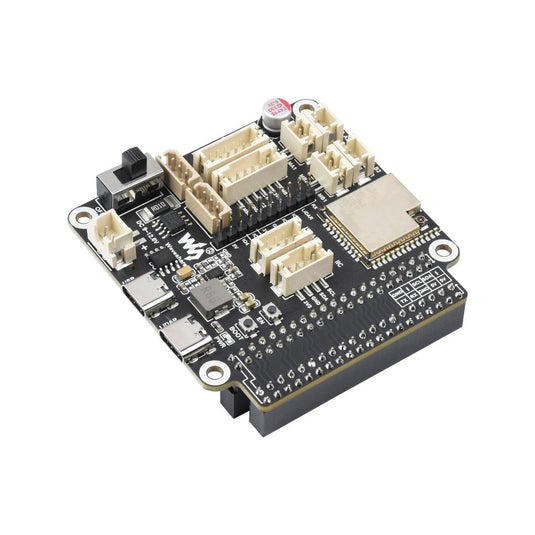
Multi-Functional Driver Board Designed For Robots, Offering More Possibilities
Features At A Glance
Based on the ESP32-WROOM-32 module, supports wireless communication such as WIFI, Bluetooth and ESP-NOW
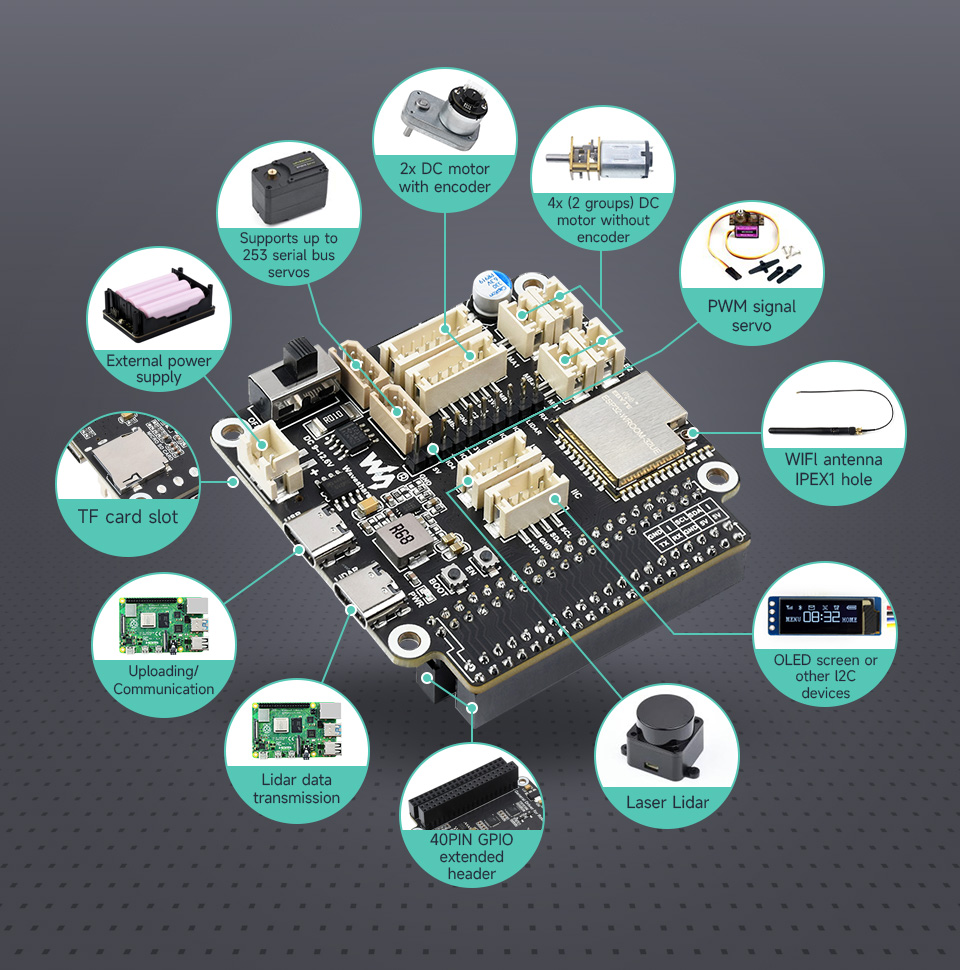
Onboard motor control interfaces for 2x DC motor with encoder or 4x DC motor (2 groups) without encoder
Onboard serial bus servos control interfaces for controlling up to 253 ST3215 serial bus servos and obtaining servos feedback
Onboard 9-axis IMU to obtain attitude and heading information at any time
Supports 7~13V power input, and can be powered directly by 2S or 3S lithium battery module
Automatic download circuit for easy uploading programs
Support input voltage/current monitoring
Onboard TF card slot
Onboard Laser Lidar interface and integrated UART to USB function
I2C interface for connecting peripherals such as OLED, IMU, and other I2C devices
Adapting Multi-functional extended header for additional functions, such as controlling servos or relays
Onboard 40PIN GPIO header for connecting and powering the host computer (Raspberry Pi/Jetson Nano, etc), communicating via serial port or I2C
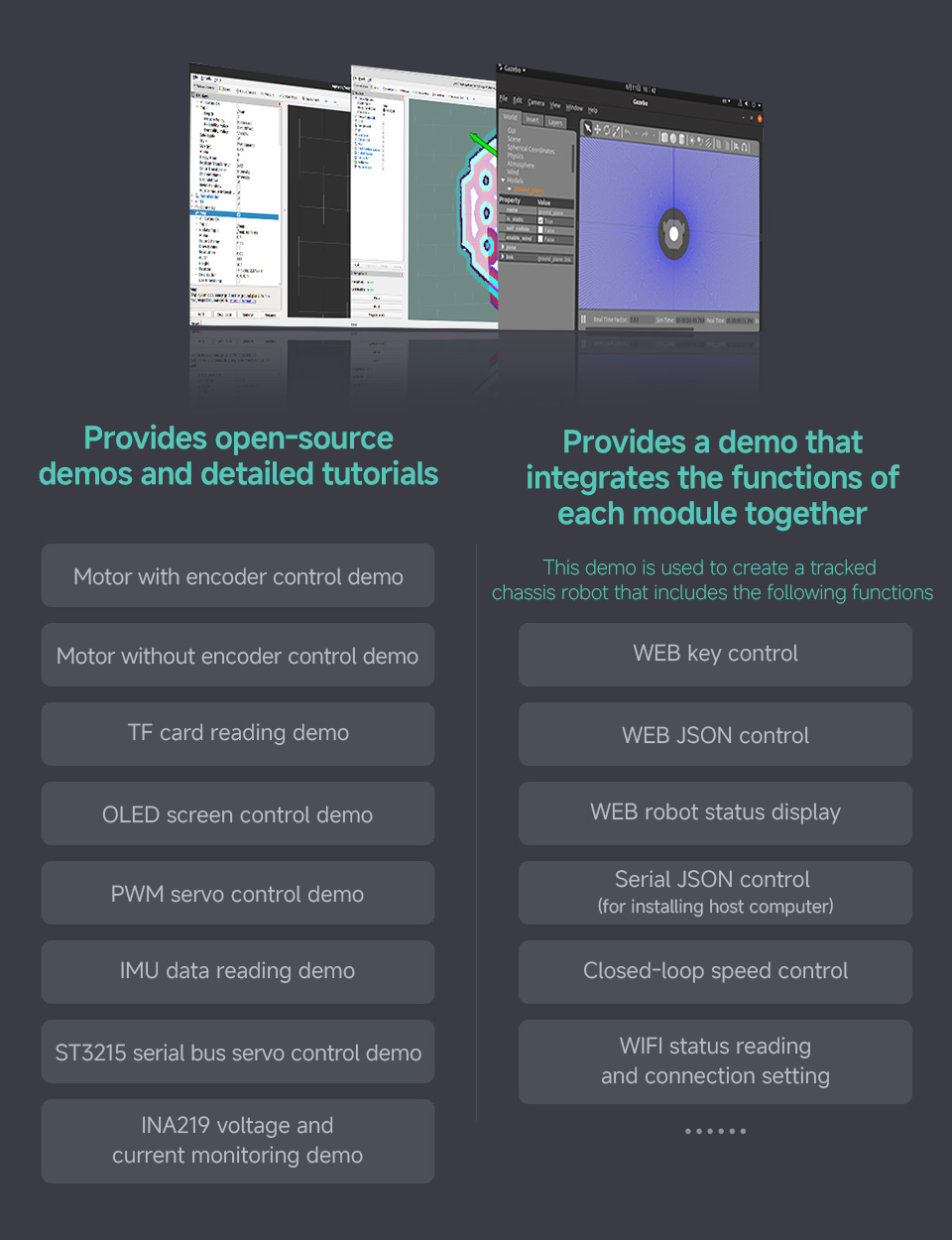
Provides open-source demos and detailed tutorials for beginners, easy to get started
Specifications
CONTROL MODULE
ESP32-WROOM-32
CONTROL CHIP
ESP32
POWER SUPPLY
DC 7~13V
POWER INTERFACE
XH2.54
ANTENNA CONNECTOR
IPEX1
DOWNLOAD INTERFACE
Type-C
WIRELESS COMMUNICATION
WIFI, Bluetooth, ESP-NOW
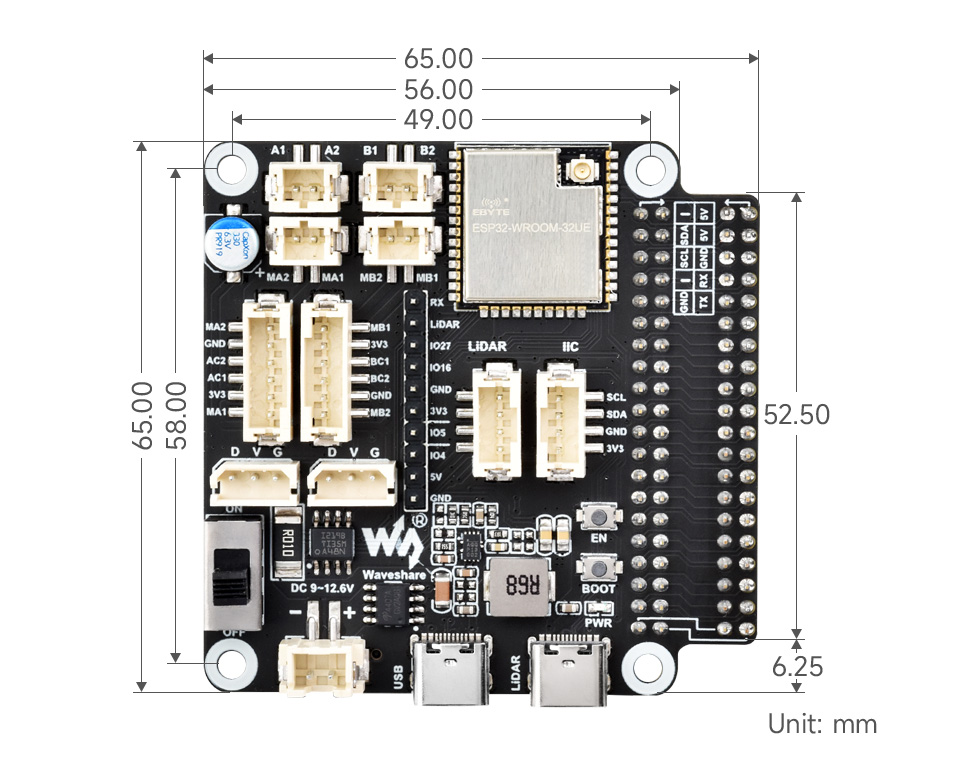
DIMENSIONS
65 × 65mm
MOUNTING HOLE SPACING
49 × 58mm
MOUNTING HOLE DIAMETER
3mm
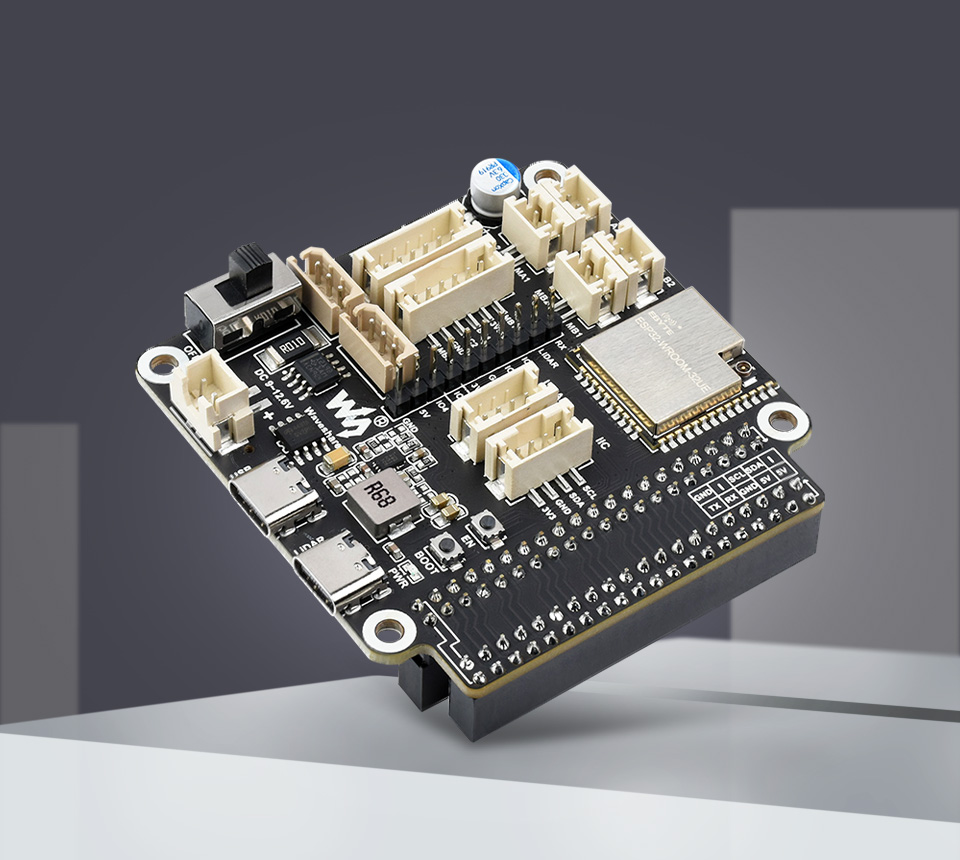
Rich Peripheral Interfaces
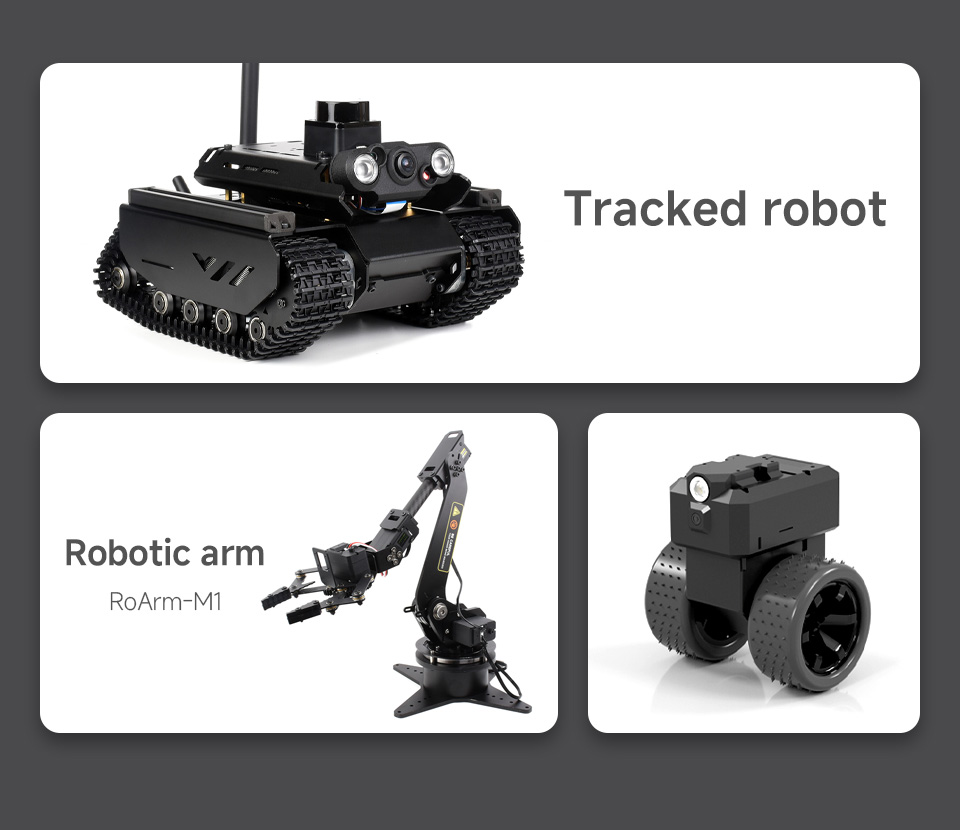
Suitable For Different Types Of Robots
ESP32 Main Controller Rich Resources For Secondary Development
Built-In WiFi And Bluetooth, As Well As ESP-NOW Support, For Wireless Communication
Support Multiple Peripheral Connections
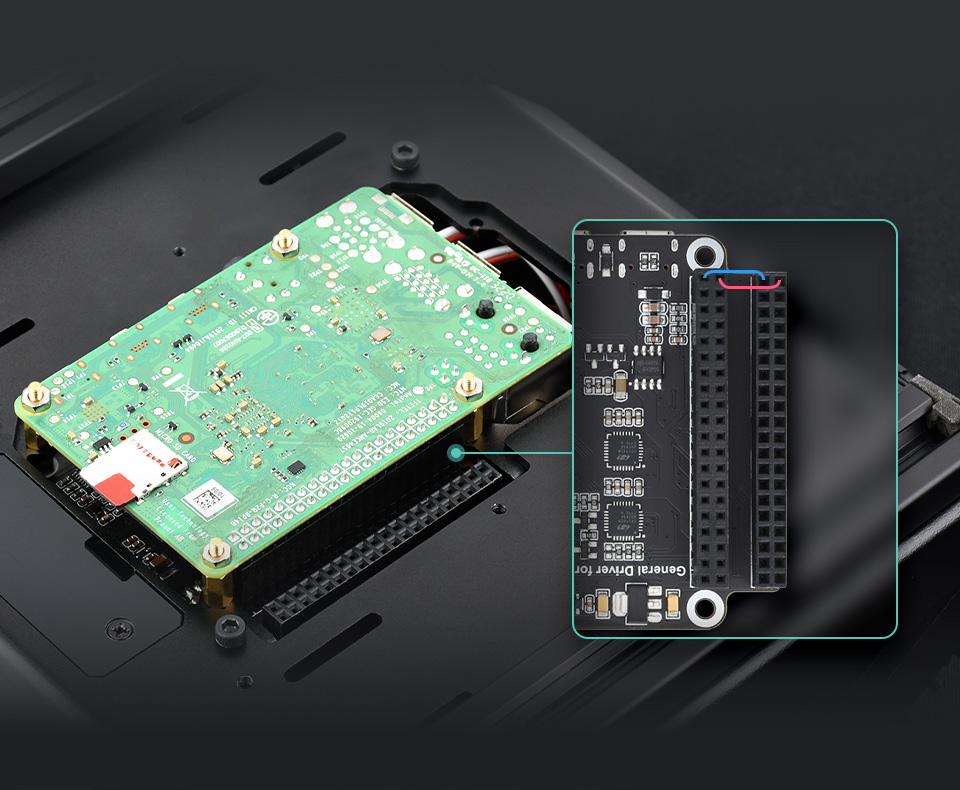
40PIN GPIO Extended Header
The inner side 40PIN header is for directly connecting to the Raspberry Pi or other host boards. And extend the outer side 40PIN header for connecting with other HATs via cables
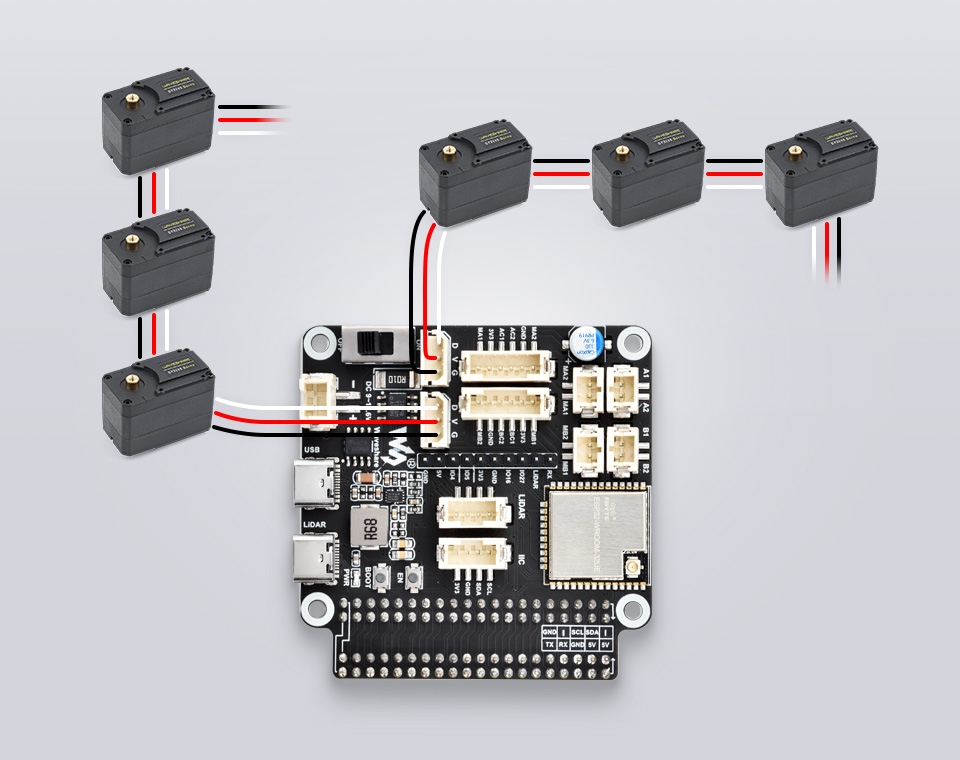
Serial Bus Servo Control
Allows Controlling Up To 253 ST3215 Serial Bus Servos At The Same Time
Note: One channel UART can control up to 253 bus servos, but due to the high power of the servos, it is necessary to consider whether the power supply solution is enough when using too many servos.
Voltage And Current Monitoring
Onboard Voltage/Current Monitoring Chip To Obtain The Power Supply Status Of The Robot At Any Time
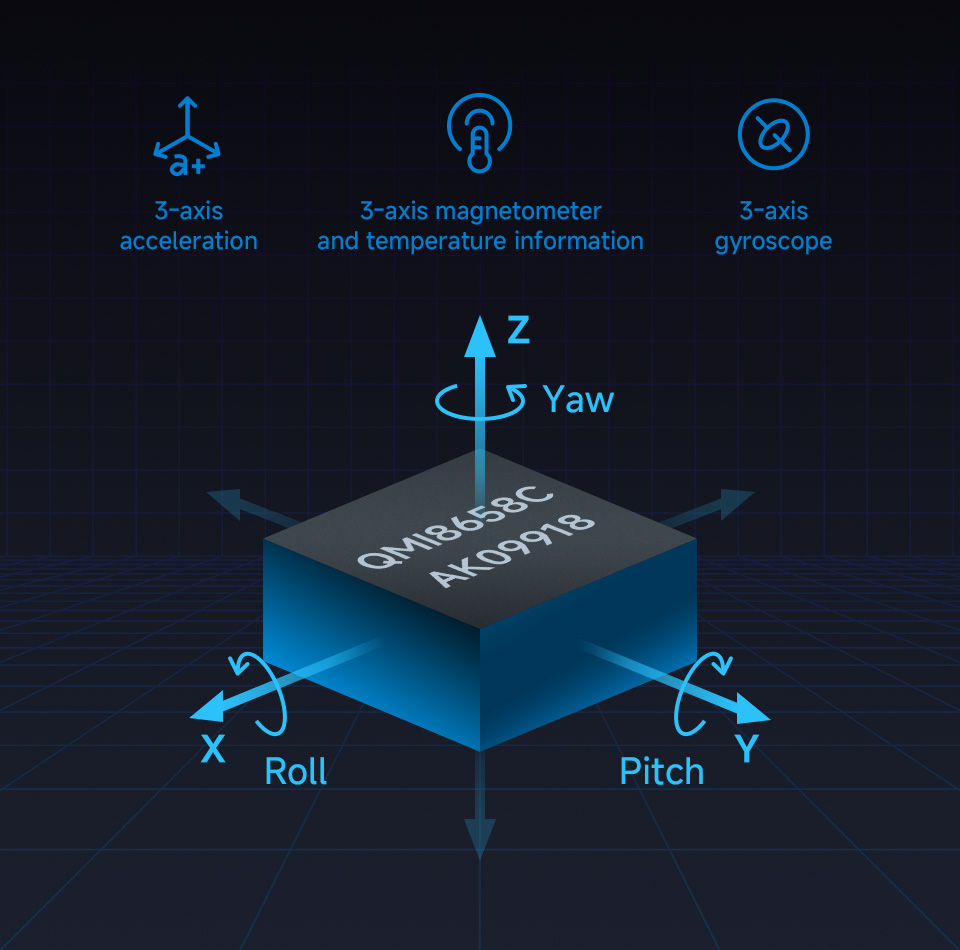
Onboard 9-Axis IMU
Onboard QMI8658C + AK09918, For Detecting Movement, Orientation, And Magnetic Support Obtaining The Heading Angle Of The Robot Anytime And Anywhere
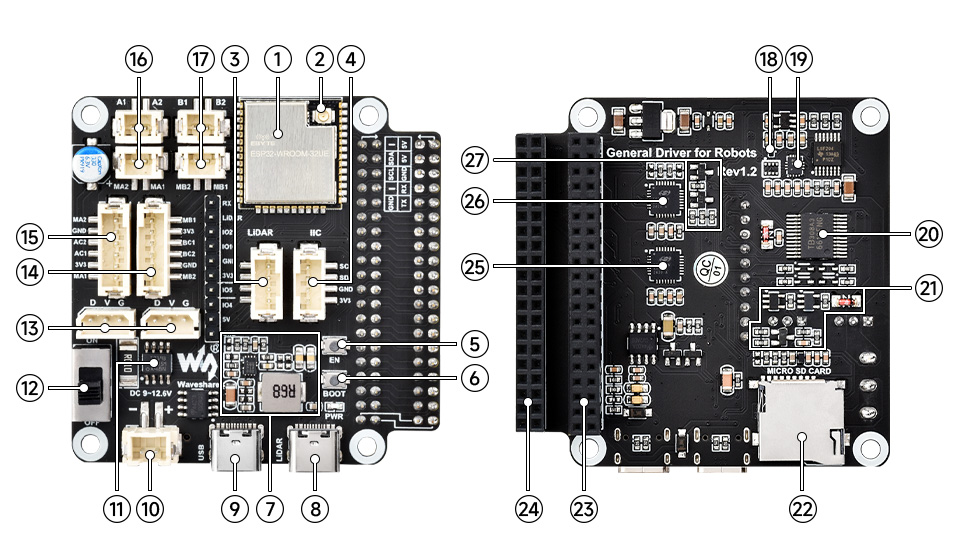
What's On Board
ESP32-WROOM-32 controller module Can be developed using Arduino IDE
IPEX1 WIFI connector For connecting WIFI antenna to increase the wireless communication distance
LIDAR interface Integrated radar adapter function
I2C peripheral expansion interface For connecting with OLED screen or other I2C sensors
Reset Button Press and release to reboot the ESP32
Download button The ESP32 will enter the download mode after powering on
DC-DC 5V voltage regulator circuit Power supply for host computers such as Raspberry Pi or Jetson nano
Type-C port (LADAR) LIDAR data transmission
Type-C port (USB) ESP32 communication interface, for uploading programs to ESP32
XH2.54 power port Support DC 7~13V input, can directly power the serial bus servos and motors
INA219 voltage/current monitoring chip
Power ON/OFF External power supply ON/OFF
ST3215 serial bus servo interface For connecting with ST3215 serial bus servo
Motor interface PH2.0 6P Group B interface for motor with encoder
Motor interface PH2.0 6P Group A interface for motor with encoder
Motor interface PH2.0 2P Group A interface for motor without encoder
Motor interface PH2.0 2P Group B interface for motor without encoder
AK09918C 3-axis electronic compass
QMI8658C 6-axis motion sensor
TB6612FNG Motor Control Chip
Serial bus servo control circuit for controlling multiple ST3215 serial bus servos and obtaining servos feedback
TF card slot Can be used to store logs or WIFI configurations
40PIN GPIO header For connecting with Raspberry Pi or other host boards
40PIN extended header Easy to use the GPIO pins of Raspberry Pi or other host boards
CP-2102 UART to USB, for radar data transmission
CP-2102 UART to USB, for ESP32 communication
Automatic download circuit For Uploading programs to the ESP32 without pressing the EN and BOOT buttons
Please note that although my status in your website shows fulfilled, my components haven't arrived yet. I am extremely disappointed by the poor coordination between your team and the delivery team.
{"id":8775839383869,"title":"Driver board for Robots, Based on ESP32, multi-functional, supports WIFI, Bluetooth and ESP-NOW communications","handle":"driver-board-for-robots-based-on-esp32-multi-functional-supports-wifi-bluetooth-and-esp-now-communications","description":"\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eGeneral Driver For Robots\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richDesc\" style=\"text-align: center;\"\u003eMulti-Functional Driver Board Designed For Robots, Offering More Possibilities\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-1.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cp\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eFeatures At A Glance\u003c\/h2\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"bgGrey alignl subBlock mgnTB\"\u003e\n\u003cul data-mce-fragment=\"1\"\u003e\n\u003cli data-mce-fragment=\"1\"\u003eBased on the ESP32-WROOM-32 module, supports wireless communication such as WIFI, Bluetooth and ESP-NOW\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard motor control interfaces for 2x DC motor with encoder or 4x DC motor (2 groups) without encoder\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard serial bus servos control interfaces for controlling up to 253 ST3215 serial bus servos and obtaining servos feedback\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard 9-axis IMU to obtain attitude and heading information at any time\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eSupports 7~13V power input, and can be powered directly by 2S or 3S lithium battery module\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eAutomatic download circuit for easy uploading programs\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eSupport input voltage\/current monitoring\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard TF card slot\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard Laser Lidar interface and integrated UART to USB function\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eI2C interface for connecting peripherals such as OLED, IMU, and other I2C devices\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eAdapting Multi-functional extended header for additional functions, such as controlling servos or relays\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard 40PIN GPIO header for connecting and powering the host computer (Raspberry Pi\/Jetson Nano, etc), communicating via serial port or I2C\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eProvides open-source demos and detailed tutorials for beginners, easy to get started\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eSpecifications\u003c\/h2\u003e\n\u003ctable style=\"width: 70%;\"\u003e\n\u003ctbody data-mce-fragment=\"1\"\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eCONTROL MODULE\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eESP32-WROOM-32\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eCONTROL CHIP\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eESP32\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003ePOWER SUPPLY\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eDC 7~13V\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003ePOWER INTERFACE\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eXH2.54\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eANTENNA CONNECTOR\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eIPEX1\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eDOWNLOAD INTERFACE\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eType-C\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eWIRELESS COMMUNICATION\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eWIFI, Bluetooth, ESP-NOW\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eDIMENSIONS\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e65 × 65mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eMOUNTING HOLE SPACING\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e49 × 58mm\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eMOUNTING HOLE DIAMETER\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e3mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003c\/tbody\u003e\n\u003c\/table\u003e\n\u003c\/div\u003e\n\u003cp\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eRich Peripheral Interfaces\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eSuitable For Different Types Of Robots\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-3.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eESP32 Main Controller\u003cbr data-mce-fragment=\"1\"\u003eRich Resources For Secondary Development\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richDesc\" style=\"text-align: center;\"\u003eBuilt-In WiFi And Bluetooth, As Well As ESP-NOW Support, For Wireless Communication\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-5.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eSupport Multiple Peripheral Connections\u003c\/h2\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-7.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e40PIN GPIO Extended Header\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"alignl pdTRBL\" style=\"text-align: center;\"\u003eThe inner side 40PIN header is for directly connecting to the Raspberry Pi or other host boards. And extend the outer side 40PIN header for connecting with other HATs via cables\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-9.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eSerial Bus Servo Control\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richDesc\" style=\"text-align: center;\"\u003eAllows Controlling Up To 253 ST3215 Serial Bus Servos At The Same Time\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-11.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cp data-mce-fragment=\"1\" class=\"msg msg_info\"\u003e\u003cem\u003e\u003cspan style=\"color: #c20000;\"\u003eNote: One channel UART can control up to 253 bus servos, but due to the high power of the servos, it is necessary to consider whether the power supply solution is enough when using too many servos.\u003c\/span\u003e\u003c\/em\u003e\u003c\/p\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eVoltage And Current Monitoring\u003c\/h2\u003e\n\u003ch4 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richDesc\"\u003eOnboard Voltage\/Current Monitoring Chip To Obtain The Power Supply Status\u003cbr data-mce-fragment=\"1\"\u003eOf The Robot At Any Time\u003c\/h4\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-13.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eOnboard 9-Axis IMU\u003c\/h2\u003e\n\u003cp style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richDesc\"\u003eOnboard QMI8658C + AK09918, For Detecting Movement, Orientation, And Magnetic\u003cbr data-mce-fragment=\"1\"\u003eSupport Obtaining The Heading Angle Of The Robot Anytime And Anywhere\u003c\/p\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-15.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eWhat's On Board\u003c\/h2\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-intro.jpg\" class=\"mgnTB\"\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"richGridWrap richGridWrap-valignTop richGridWrap-2c alignl subBlock bgGrey\"\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003col data-mce-fragment=\"1\"\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eESP32-WROOM-32 controller module\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eCan be developed using Arduino IDE\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eIPEX1 WIFI connector\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting WIFI antenna to increase the wireless communication distance\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eLIDAR interface\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eIntegrated radar adapter function\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eI2C peripheral expansion interface\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting with OLED screen or other I2C sensors\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eReset Button\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003ePress and release to reboot the ESP32\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eDownload button\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eThe ESP32 will enter the download mode after powering on\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eDC-DC 5V voltage regulator circuit\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003ePower supply for host computers such as Raspberry Pi or Jetson nano\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eType-C port (LADAR)\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eLIDAR data transmission\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eType-C port (USB)\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eESP32 communication interface, for uploading programs to ESP32\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eXH2.54 power port\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eSupport DC 7~13V input, can directly power the serial bus servos and motors\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eINA219\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003evoltage\/current monitoring chip\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003ePower ON\/OFF\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eExternal power supply ON\/OFF\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eST3215 serial bus servo interface\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting with ST3215 serial bus servo\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 6P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup B interface for motor with encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 6P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup A interface for motor with encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 2P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup A interface for motor without encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 2P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup B interface for motor without encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eAK09918C\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e3-axis electronic compass \u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eQMI8658C \u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e6-axis motion sensor \u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eTB6612FNG \u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eMotor Control Chip \u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eSerial bus servo control circuit\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003efor controlling multiple ST3215 serial bus servos and obtaining servos feedback\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eTF card slot\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eCan be used to store logs or WIFI configurations\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003e40PIN GPIO header\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting with Raspberry Pi or other host boards\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003e40PIN extended header\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eEasy to use the GPIO pins of Raspberry Pi or other host boards\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eCP-2102\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eUART to USB, for radar data transmission\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eCP-2102\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eUART to USB, for ESP32 communication\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eAutomatic download circuit\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor Uploading programs to the ESP32 without pressing the EN and BOOT buttons\u003c\/li\u003e\n\u003c\/ol\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003cp\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eProvides Open-Source Demos\u003cbr data-mce-fragment=\"1\"\u003eAnd Detailed Tutorials\u003c\/h2\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-17.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eOutline Dimensions\u003c\/h2\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-size.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eResources:\u003c\/h2\u003e\n\u003chr data-mce-fragment=\"1\"\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eWIKI:\u003cspan data-mce-fragment=\"1\"\u003e \u003c\/span\u003e\u003c\/strong\u003e\u003ca data-mce-fragment=\"1\" href=\"http:\/\/www.waveshare.com\/wiki\/General_Driver_for_Robots\" target=\"_blank\"\u003ewww.waveshare.com\/wiki\/General_Driver_for_Robots\u003c\/a\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\u003cbr\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003cmeta charset=\"utf-8\"\u003e\n\u003ch2\u003e\u003cstrong\u003e \u003c\/strong\u003e\u003c\/h2\u003e\n\u003ch2\u003e\u003cstrong\u003ePackage Contents:\u003c\/strong\u003e\u003c\/h2\u003e\n\u003cp\u003e\u003cstrong\u003eWeight:\u003cspan\u003e \u003c\/span\u003e\u003c\/strong\u003e\u003cspan\u003e0.049 kg\u003c\/span\u003e\u003c\/p\u003e\n\u003cdiv class=\"std\"\u003e\n\u003col\u003e\n\u003cli\u003eGeneral Driver for Robots x1\u003c\/li\u003e\n\u003cli\u003eScrews pack x1\u003c\/li\u003e\n\u003c\/ol\u003e\n\u003cdiv class=\"imgTextWrap\"\u003e\n\u003cdiv\u003e1\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-2_220.jpg\"\u003e2\u003ca href=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-10.jpg\" style=\"font-family: -apple-system, BlinkMacSystemFont, 'San Francisco', 'Segoe UI', Roboto, 'Helvetica Neue', sans-serif; font-size: 0.875rem;\" target=\"_blank\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-10_93.jpg\"\u003e\u003c\/a\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e","published_at":"2023-09-25T23:28:46+05:30","created_at":"2023-09-25T22:56:21+05:30","vendor":"Waveshare","type":"","tags":["23730","arduino motor driver","DC motor driver","driver","ESP32","MOT-ACC","Motor driver","Motor Driver Module","Motor driver Shield","motor drivers","MTR-DRV","openCV","raspberry pi drivers","ROS","servo driver","WaveSH","Waveshare","WVSH","ZOHO UPDATED"],"price":324999,"price_min":324999,"price_max":324999,"available":true,"price_varies":false,"compare_at_price":329999,"compare_at_price_min":329999,"compare_at_price_max":329999,"compare_at_price_varies":false,"variants":[{"id":46973090922813,"title":"Default Title","option1":"Default Title","option2":null,"option3":null,"sku":"WVSH0418","requires_shipping":true,"taxable":true,"featured_image":null,"available":true,"name":"Driver board for Robots, Based on ESP32, multi-functional, supports WIFI, Bluetooth and ESP-NOW communications","public_title":null,"options":["Default Title"],"price":324999,"weight":100,"compare_at_price":329999,"inventory_management":"shopify","barcode":"WVSH0418","requires_selling_plan":false,"selling_plan_allocations":[],"quantity_rule":{"min":1,"max":null,"increment":1}}],"images":["\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-1.jpg?v=1695662839","\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-2.jpg?v=1695662839","\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-3.jpg?v=1695662839","\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-4.jpg?v=1695662839","\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-5.jpg?v=1695662839","\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-7.jpg?v=1695662839","\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-6.jpg?v=1695662839"],"featured_image":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-1.jpg?v=1695662839","options":["Title"],"media":[{"alt":"ESP32 Driver Board For Robot","id":35112615772477,"position":1,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-1.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-1.jpg?v=1695662839","width":800},{"alt":"ESP32 Driver Board For Robot","id":35112615739709,"position":2,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-2.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-2.jpg?v=1695662839","width":800},{"alt":"ESP32 Driver Board For Robot","id":35112615706941,"position":3,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-3.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-3.jpg?v=1695662839","width":800},{"alt":"ESP32 Driver Board For Robot","id":35112615674173,"position":4,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-4.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-4.jpg?v=1695662839","width":800},{"alt":"ESP32 Driver Board For Robot","id":35112615641405,"position":5,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-5.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-5.jpg?v=1695662839","width":800},{"alt":"ESP32 Driver Board For Robot","id":35112615575869,"position":6,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-7.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-7.jpg?v=1695662839","width":800},{"alt":"ESP32 Driver Board For Robot","id":35112615608637,"position":7,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-6.jpg?v=1695662839"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/files\/general-driver-for-robots-6.jpg?v=1695662839","width":800}],"requires_selling_plan":false,"selling_plan_groups":[],"content":"\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eGeneral Driver For Robots\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richDesc\" style=\"text-align: center;\"\u003eMulti-Functional Driver Board Designed For Robots, Offering More Possibilities\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-1.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cp\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eFeatures At A Glance\u003c\/h2\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"bgGrey alignl subBlock mgnTB\"\u003e\n\u003cul data-mce-fragment=\"1\"\u003e\n\u003cli data-mce-fragment=\"1\"\u003eBased on the ESP32-WROOM-32 module, supports wireless communication such as WIFI, Bluetooth and ESP-NOW\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard motor control interfaces for 2x DC motor with encoder or 4x DC motor (2 groups) without encoder\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard serial bus servos control interfaces for controlling up to 253 ST3215 serial bus servos and obtaining servos feedback\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard 9-axis IMU to obtain attitude and heading information at any time\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eSupports 7~13V power input, and can be powered directly by 2S or 3S lithium battery module\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eAutomatic download circuit for easy uploading programs\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eSupport input voltage\/current monitoring\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard TF card slot\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard Laser Lidar interface and integrated UART to USB function\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eI2C interface for connecting peripherals such as OLED, IMU, and other I2C devices\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eAdapting Multi-functional extended header for additional functions, such as controlling servos or relays\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eOnboard 40PIN GPIO header for connecting and powering the host computer (Raspberry Pi\/Jetson Nano, etc), communicating via serial port or I2C\u003c\/li\u003e\n\u003cli data-mce-fragment=\"1\"\u003eProvides open-source demos and detailed tutorials for beginners, easy to get started\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eSpecifications\u003c\/h2\u003e\n\u003ctable style=\"width: 70%;\"\u003e\n\u003ctbody data-mce-fragment=\"1\"\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eCONTROL MODULE\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eESP32-WROOM-32\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eCONTROL CHIP\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eESP32\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003ePOWER SUPPLY\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eDC 7~13V\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003ePOWER INTERFACE\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eXH2.54\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eANTENNA CONNECTOR\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eIPEX1\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eDOWNLOAD INTERFACE\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eType-C\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eWIRELESS COMMUNICATION\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003eWIFI, Bluetooth, ESP-NOW\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eDIMENSIONS\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e65 × 65mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003ctr data-mce-fragment=\"1\"\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eMOUNTING HOLE SPACING\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e49 × 58mm\u003c\/td\u003e\n\u003cth data-mce-fragment=\"1\"\u003e\u003cstrong\u003eMOUNTING HOLE DIAMETER\u003c\/strong\u003e\u003c\/th\u003e\n\u003ctd data-mce-fragment=\"1\"\u003e3mm\u003c\/td\u003e\n\u003c\/tr\u003e\n\u003c\/tbody\u003e\n\u003c\/table\u003e\n\u003c\/div\u003e\n\u003cp\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eRich Peripheral Interfaces\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eSuitable For Different Types Of Robots\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-3.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eESP32 Main Controller\u003cbr data-mce-fragment=\"1\"\u003eRich Resources For Secondary Development\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richDesc\" style=\"text-align: center;\"\u003eBuilt-In WiFi And Bluetooth, As Well As ESP-NOW Support, For Wireless Communication\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-5.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eSupport Multiple Peripheral Connections\u003c\/h2\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-7.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e40PIN GPIO Extended Header\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"alignl pdTRBL\" style=\"text-align: center;\"\u003eThe inner side 40PIN header is for directly connecting to the Raspberry Pi or other host boards. And extend the outer side 40PIN header for connecting with other HATs via cables\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-9.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eSerial Bus Servo Control\u003c\/h2\u003e\n\u003ch4 data-mce-fragment=\"1\" class=\"richDesc\" style=\"text-align: center;\"\u003eAllows Controlling Up To 253 ST3215 Serial Bus Servos At The Same Time\u003c\/h4\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-11.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cp data-mce-fragment=\"1\" class=\"msg msg_info\"\u003e\u003cem\u003e\u003cspan style=\"color: #c20000;\"\u003eNote: One channel UART can control up to 253 bus servos, but due to the high power of the servos, it is necessary to consider whether the power supply solution is enough when using too many servos.\u003c\/span\u003e\u003c\/em\u003e\u003c\/p\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eVoltage And Current Monitoring\u003c\/h2\u003e\n\u003ch4 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richDesc\"\u003eOnboard Voltage\/Current Monitoring Chip To Obtain The Power Supply Status\u003cbr data-mce-fragment=\"1\"\u003eOf The Robot At Any Time\u003c\/h4\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-13.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"pdT\"\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eOnboard 9-Axis IMU\u003c\/h2\u003e\n\u003cp style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richDesc\"\u003eOnboard QMI8658C + AK09918, For Detecting Movement, Orientation, And Magnetic\u003cbr data-mce-fragment=\"1\"\u003eSupport Obtaining The Heading Angle Of The Robot Anytime And Anywhere\u003c\/p\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-15.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv style=\"text-align: center;\" data-mce-fragment=\"1\"\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003e \u003c\/h2\u003e\n\u003ch2 style=\"text-align: center;\" data-mce-fragment=\"1\" class=\"richTitle\"\u003eWhat's On Board\u003c\/h2\u003e\n\u003cimg style=\"margin-bottom: 16px; float: none;\" data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-intro.jpg\" class=\"mgnTB\"\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"richGridWrap richGridWrap-valignTop richGridWrap-2c alignl subBlock bgGrey\"\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003col data-mce-fragment=\"1\"\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eESP32-WROOM-32 controller module\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eCan be developed using Arduino IDE\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eIPEX1 WIFI connector\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting WIFI antenna to increase the wireless communication distance\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eLIDAR interface\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eIntegrated radar adapter function\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eI2C peripheral expansion interface\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting with OLED screen or other I2C sensors\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eReset Button\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003ePress and release to reboot the ESP32\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eDownload button\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eThe ESP32 will enter the download mode after powering on\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eDC-DC 5V voltage regulator circuit\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003ePower supply for host computers such as Raspberry Pi or Jetson nano\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eType-C port (LADAR)\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eLIDAR data transmission\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eType-C port (USB)\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eESP32 communication interface, for uploading programs to ESP32\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eXH2.54 power port\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eSupport DC 7~13V input, can directly power the serial bus servos and motors\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eINA219\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003evoltage\/current monitoring chip\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003ePower ON\/OFF\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eExternal power supply ON\/OFF\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eST3215 serial bus servo interface\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting with ST3215 serial bus servo\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 6P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup B interface for motor with encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 6P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup A interface for motor with encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 2P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup A interface for motor without encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eMotor interface PH2.0 2P\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eGroup B interface for motor without encoder\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eAK09918C\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e3-axis electronic compass \u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eQMI8658C \u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003e6-axis motion sensor \u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eTB6612FNG \u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eMotor Control Chip \u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eSerial bus servo control circuit\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003efor controlling multiple ST3215 serial bus servos and obtaining servos feedback\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eTF card slot\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eCan be used to store logs or WIFI configurations\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003e40PIN GPIO header\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor connecting with Raspberry Pi or other host boards\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003e40PIN extended header\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eEasy to use the GPIO pins of Raspberry Pi or other host boards\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eCP-2102\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eUART to USB, for radar data transmission\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eCP-2102\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eUART to USB, for ESP32 communication\u003c\/li\u003e\n\u003cli style=\"text-align: left;\" data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eAutomatic download circuit\u003c\/strong\u003e\u003cbr data-mce-fragment=\"1\"\u003eFor Uploading programs to the ESP32 without pressing the EN and BOOT buttons\u003c\/li\u003e\n\u003c\/ol\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003cp\u003e\u003cbr data-mce-fragment=\"1\"\u003e\u003c\/p\u003e\n\u003cdiv data-mce-fragment=\"1\" class=\"pdT\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eProvides Open-Source Demos\u003cbr data-mce-fragment=\"1\"\u003eAnd Detailed Tutorials\u003c\/h2\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-17.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\" style=\"text-align: center;\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003e \u003c\/h2\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\" style=\"text-align: center;\"\u003eOutline Dimensions\u003c\/h2\u003e\n\u003cimg data-mce-fragment=\"1\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-details-size.jpg\" style=\"margin-bottom: 16px; float: none;\"\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003ch2 data-mce-fragment=\"1\" class=\"richTitle\"\u003eResources:\u003c\/h2\u003e\n\u003chr data-mce-fragment=\"1\"\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003cstrong data-mce-fragment=\"1\"\u003eWIKI:\u003cspan data-mce-fragment=\"1\"\u003e \u003c\/span\u003e\u003c\/strong\u003e\u003ca data-mce-fragment=\"1\" href=\"http:\/\/www.waveshare.com\/wiki\/General_Driver_for_Robots\" target=\"_blank\"\u003ewww.waveshare.com\/wiki\/General_Driver_for_Robots\u003c\/a\u003e\n\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\u003cbr\u003e\u003c\/div\u003e\n\u003cdiv data-mce-fragment=\"1\"\u003e\n\u003cmeta charset=\"utf-8\"\u003e\n\u003ch2\u003e\u003cstrong\u003e \u003c\/strong\u003e\u003c\/h2\u003e\n\u003ch2\u003e\u003cstrong\u003ePackage Contents:\u003c\/strong\u003e\u003c\/h2\u003e\n\u003cp\u003e\u003cstrong\u003eWeight:\u003cspan\u003e \u003c\/span\u003e\u003c\/strong\u003e\u003cspan\u003e0.049 kg\u003c\/span\u003e\u003c\/p\u003e\n\u003cdiv class=\"std\"\u003e\n\u003col\u003e\n\u003cli\u003eGeneral Driver for Robots x1\u003c\/li\u003e\n\u003cli\u003eScrews pack x1\u003c\/li\u003e\n\u003c\/ol\u003e\n\u003cdiv class=\"imgTextWrap\"\u003e\n\u003cdiv\u003e1\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-2_220.jpg\"\u003e2\u003ca href=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-10.jpg\" style=\"font-family: -apple-system, BlinkMacSystemFont, 'San Francisco', 'Segoe UI', Roboto, 'Helvetica Neue', sans-serif; font-size: 0.875rem;\" target=\"_blank\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/General-Driver-for-Robots\/General-Driver-for-Robots-10_93.jpg\"\u003e\u003c\/a\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e\n\u003c\/div\u003e"}















 2
2

