




DOBOT X-Trainer
AI Data Collection and Training Robot System

Unlimited Versatility in Various Applications
DOBOT X-Trainer is an advanced AI data collection and training robot system designed to enable AGI research and practical AI projects. With diverse data collection and model training capabilities, X-Trainer ensures rapid skill acquisition and seamless execution of complex instructions, perfect for AGI scene stimulation and research and practical projects and competitions.
Instant Imitation
Learning Networks
Effortless Smooth
Motion Control
High Precision
Slavehands
Safe Human-Robot
Collaboration
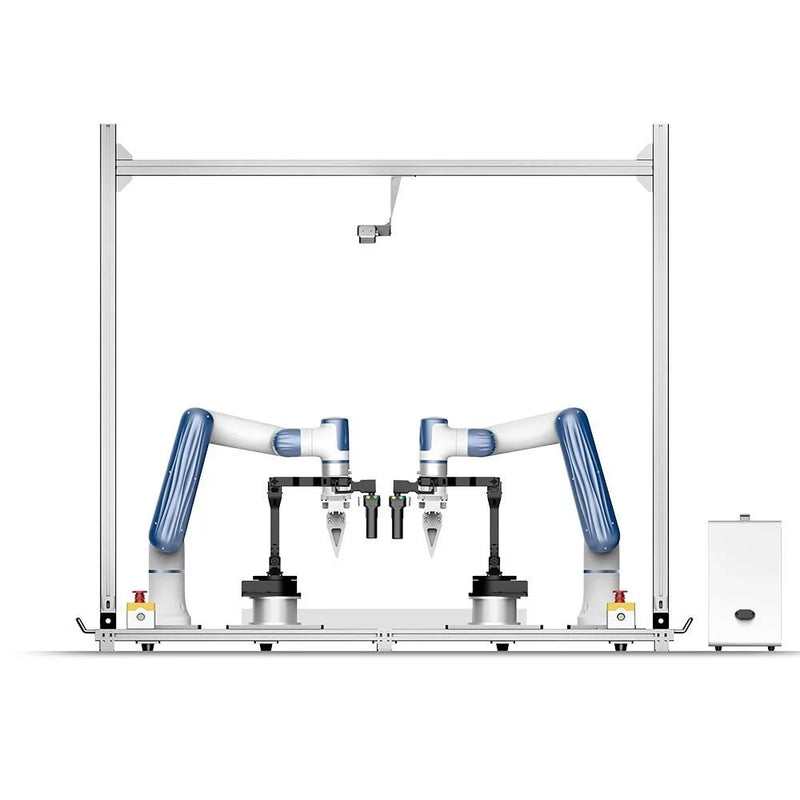
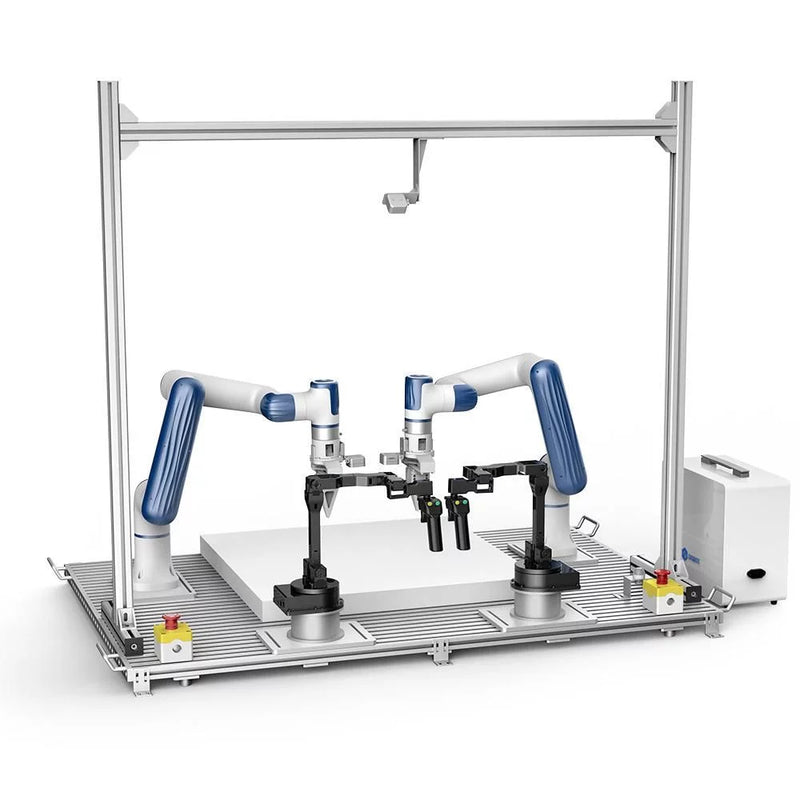
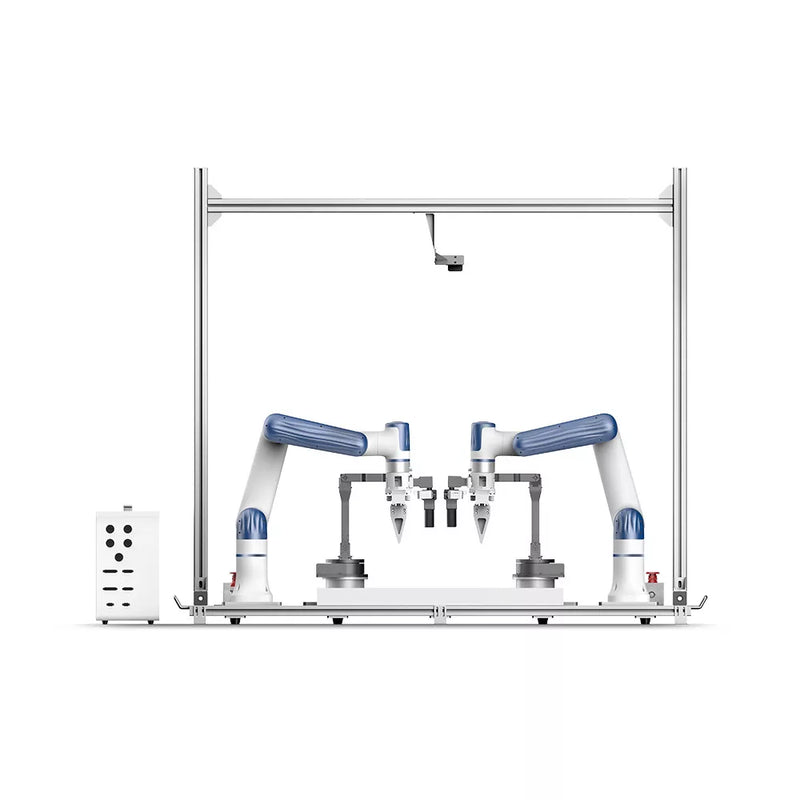
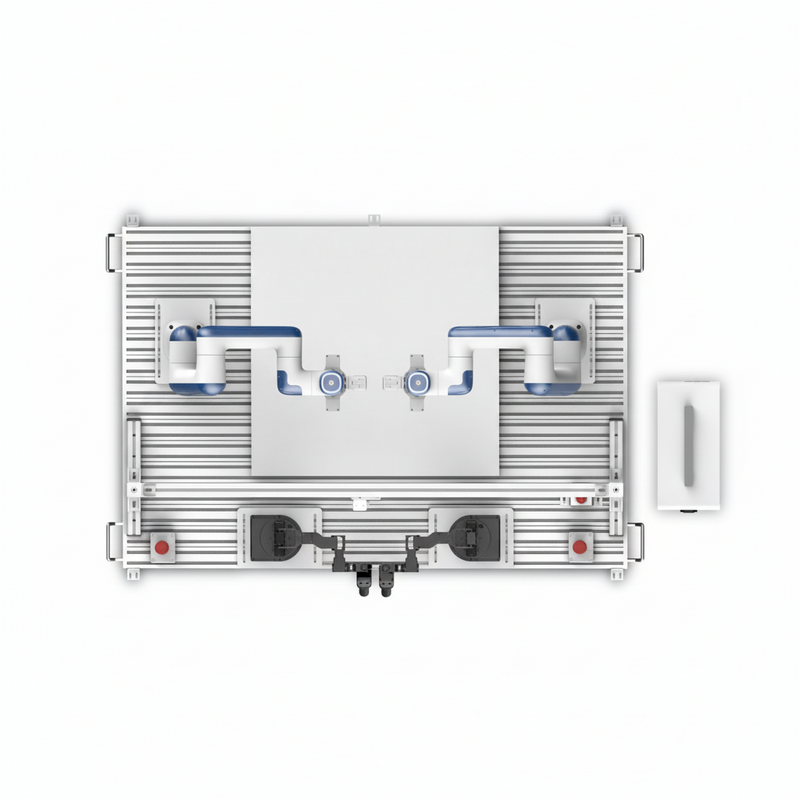
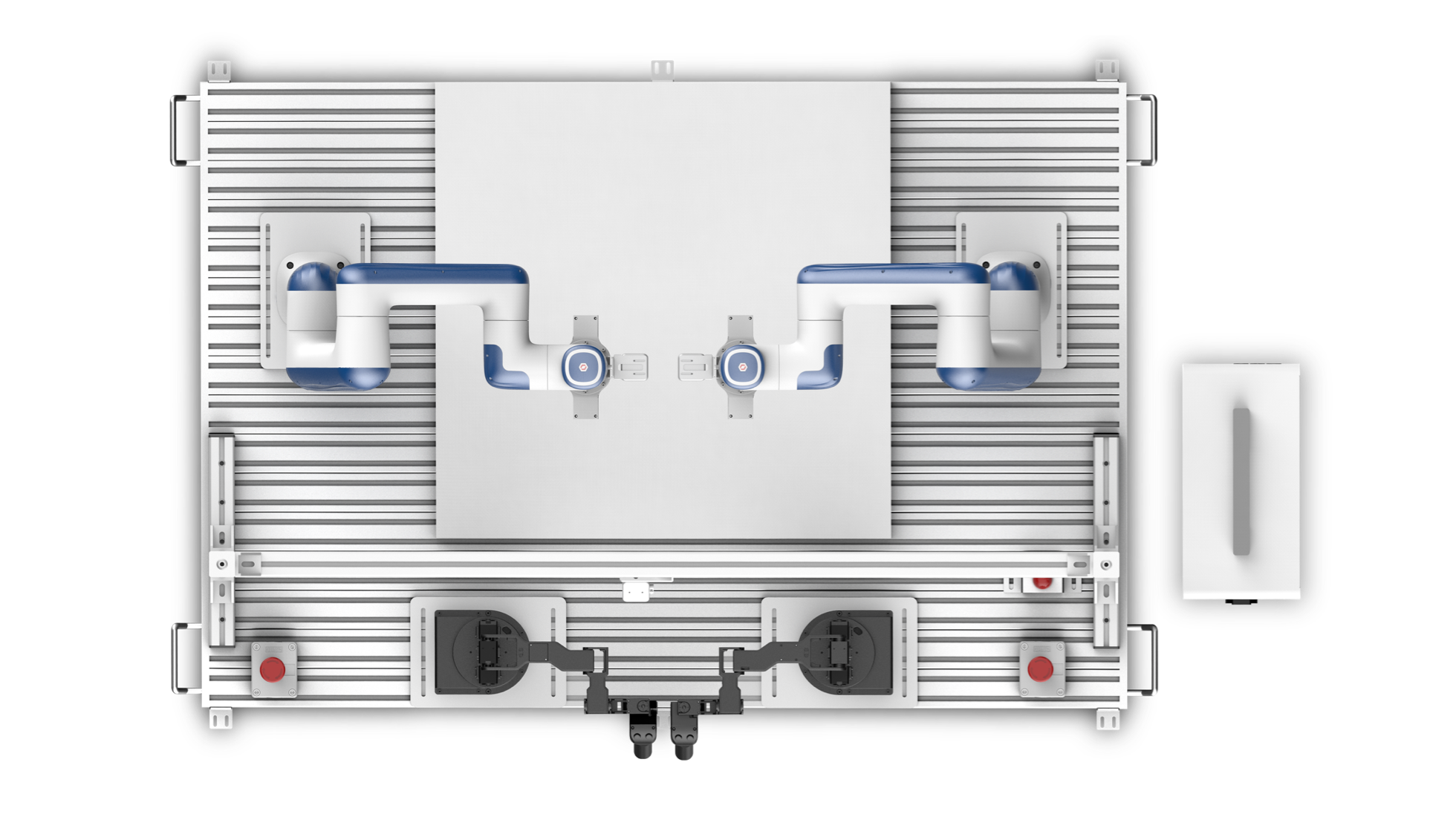
Lightweight Base for Quick Deployment
The lightweight base design reduces weight by 70%, making it easy to transport and deploy. Equipped with 4 ergonomic handles, it offers exceptional flexibility for setup. Additionally, its 6 mounting feet provide enhanced stability, enabling secure placement on various platforms.

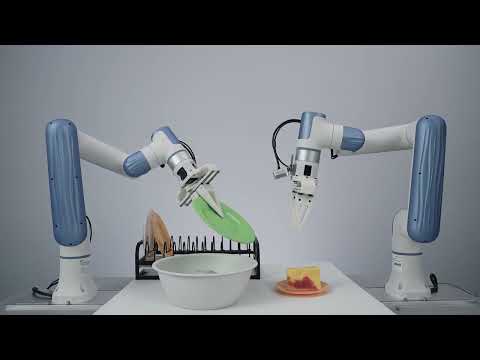
Artificial General Intelligence Scene Simulation & Research
The X-Trainer platform enables researchers to simulate a wide range of real-life and workplace scenarios, from robots assisting with cooking at home to performing complex tasks like assembly and material handling in industrial environments. This allows for in-depth exploration of the practicality and usability of embodied intelligence devices in everyday applications.

AI Large-Scale Model Data Collection & Training
The X-Trainer platform excels in collecting diverse, contextualized data such as images, videos, and positional information, making it ideal for training embodied intelligence AI models. It seamlessly fulfills the data collection and training needs of both academic research and industrial applications.

Effortless & Smooth Motion Control
|
Ultra Lightweight DesignKeeps hand loads under only 400g, uses 3D printed monolithic joints to reduce parts and achieve a lightweight user experience. |
Easy-to-Use ButtonsMaster hand has unlock and record buttons - the unlock enables quick locking/unlocking of the master hand pose, while the record button allows convenient control. |
Smooth OperationFeatures spring-assisted chassis, high-performance servos for precise motion, and an optimized primary manipulator for intuitive teleoperation. |



Safe Human-Robot Collaboration
Brilliant Safety DesignsIncludes auto de-sync of master-slave arms on power loss/alarms, master hand drop detection, and low-speed master-slave sync to prevent collisions. |
Collision DetectionThe DOBOT X-Trainer's Nova2 cobot has 5-level collision detection and ISO15066 certification for safe human-robot interaction. |
All-Around ProtectionThe workspace is padded with flexible EVA foam, effectively cushioning against accidental drops of the end-effector and minimizing damage risk to the gripper and arm. |
Key Features
| Category | Details |
|---|---|
| Direct Imitation Learning Networks | Fast Learning: Training time reduced by 70%. Routine scenario training (e.g., washing dishes or folding clothes) can be completed in just 2 hours. |
| Interference Resistance: During autonomous tasks, DOBOT X-Trainer quickly corrects real-time disturbances (e.g., recognizing and removing stains during dishwashing), demonstrating advanced AI adaptability. | |
| Low Latency Operation: 25Hz end-to-end high-performance motion interface improves response speed by 150% compared to similar products, ensuring smoother and more stable operation. | |
| High Precision Slave Hands | Industrial Grade Precision: Achieves ±0.05mm repeat positioning accuracy for precise experimental operations and sensitive data collection. |
| Large Scale Motion: 625mm range per arm, expandable to 1200mm in dual-arm mode, with 6-axis flexibility for wide workspace coverage. | |
| High Load Capacity and Speed: Supports 2kg single-arm and 3kg dual-arm load capacity, with a top speed of 1.6m/s for efficient data collection. | |
| Secondary Development | Complete Data Collection: Includes a full SDK covering data collection, model training, and autonomous inference workflow, with detailed documentation to guide users through the entire pipeline. |
| Open API Interfaces: Access master/slave joint angles, gripper control, camera RGB/depth data, and export specialized data formats for integration with custom AI models and domain-specific neural networks. |
Specifications
| Component | Parameter | Specification |
|---|---|---|
| Master Hand | Weight | 1 kg |
| DOF | 6 | |
| Max Working Radius | 437 mm | |
| Motor | High-performance servo motor | |
| Buttons | Unlock button, record button | |
| Base Dimensions | 149 × 130 × 58 mm | |
| Power Input | 100V~240V AC, 50/60 Hz | |
| Rated Voltage | DC 12V 2A | |
| Communication Interface | USB | |
| Operating Environment | Temperature: 0°C–40°C; Humidity: 25%–85% (non-condensing) | |
| Base | Weight | 85 kg |
| Dimensions (Folded) | 1630 × 1060 × 380 mm | |
| Dimensions (Unfolded) | 1530 × 960 × 1300 mm | |
| Power Input | 100V~240V AC, 50/60 Hz | |
| Rated Power | 150W | |
| Power Supply | DC 24V ×6, max 4A per port, total output 4A | |
| Communication Interface | Ethernet | |
| Communication Protocol | TCP/IP | |
| Indicators & Safety | Tricolor indicator ×1, Emergency stop switches ×2 | |
| Nova 2 Slave-Hand Gripper | Weight | 0.6 kg (including camera & bracket) |
| Max Opening Distance | 95 mm | |
| Clamping Force | 0–15N | |
| Dimensions | 160 × 202 × 75 mm | |
| Operating Environment | Temperature: 0°C–40°C; Humidity: 25%–85% (non-condensing) | |
| DOBOT Nova 2 (Not Included) | Weight | 11 kg |
| DOF | 6 | |
| Payload | 2 kg | |
| Repeatability | 0.05 mm | |
| Max Working Radius | 625 mm | |
| Operating Environment | Temperature: 0°C–40°C; Humidity: 25%–85% (non-condensing) | |
| Camera | Model | Depth-sensing camera |
| Dimensions | 36.5 × 19.4 × 10.5 mm (module) | |
| Depth FOV | 87° × 58° | |
| Depth Output Resolution | Up to 1280 × 720 | |
| Communication Interface | USB 2.0 / USB 3.1 |
Resources
| Dobot X-Trainer (Lightweight Base) User Guide | Download |
| Dobot X-Trainer Operation Guide and FAQ | Download |
| Dobot X-Trainer With UI Control Interface Version User Manual | Download |
| Dobot CRStudio User Guide (CR&Nova) | Download |
| DobotStudio Pro 2.8 User Guide (CR&Nova) | Download |
Packaging List for DOBOT X-Trainer
Excluding 2 Robot Arms and Nova 2
| Master Hand - Teleoperated Master Hand | 2x | 6 high DOF & Precision Master Hands with Grippers, including unlocking and record buttons |
| Gripper - Slave-Hand Gripper | 2x | Max opening & closing distance is 95 mm; Packed and shipped together with the Master Hands |
| Camera - End of Master Hands & Camera | 3x | Depth-sensing camera; Packed and shipped together with the Master Hands |
| Base - Fixed Base | 1x | Fixed base for robotic arm; With Camera Bracket |
| Optional | ||
| Computer - Training Platform | 1x | Recommended Specifications: RTX4090-24G GPU, Intel i9-14900KF, 32GB, 2TB * Training time is affected by specific scenarios, usage models and hardware configurations. Refer to the specific situation for assistance. |
Product Demonstration
Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.
