Mini Stepper Motor for Lighter projects requiring precise geared control.
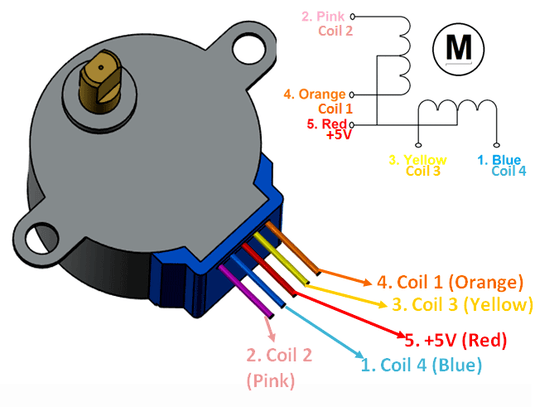
The motor has a reduction ratio of 64:1, so it offers a decent torque for its size at speeds of about 15 RPM. It is a unipolar stepper motor which has 5-wires.
As stated before the pack contains ULN2003 Stepper Motor Driverwhich is a Mini Stepper Motor Driver. The main purpose ofULN2003is to amplify the control signals from the Arduino, so as to drive the 28BYJ-48 Stepper Motor.
If you will give theULN2003 stepper drivera certain pulse signal, it will drive step motor to a certain angle. The control ofStepper Motormovement angle is done by controlling the number of stepper motor driver pulses. The speed of the stepper motor rotation is also controllable by controlling the frequency of the pulses.
Specifications
Reduction Ratio: 1:64
Step Angle: 5.625
Voltage: 12V
Diameter: 28mm
5-Line 4-phase can be driven by ordinary ULN2003 chip ,can also be connected in phase 2 development board used for supporting the use of a direct plug and easy to use stepper motor used in the development board
Use left/right arrows to navigate the slideshow or swipe left/right if using a mobile device
Choosing a selection results in a full page refresh.
Press the space key then arrow keys to make a selection.
Shopping Cart
{"id":1415831617608,"title":"Stepper Motor (12V 4-Phase 5-Wire) - 28BYJ-48 with ULN2003","handle":"28byj-48-12v-4-phase-5-wire-stepper-motor","description":"\u003cp\u003eMini Stepper Motor for Lighter projects requiring precise geared control.\u003c\/p\u003e\n\u003cp\u003eThe motor has a reduction ratio of 64:1, so it offers a decent torque for its size at speeds of about 15 RPM. It is a unipolar stepper motor which has 5-wires.\u003c\/p\u003e\n\u003cp\u003eAs stated before the pack contains ULN2003 Stepper Motor Driver\u003cspan\u003e \u003c\/span\u003ewhich is a Mini Stepper Motor Driver. The main purpose of\u003cspan\u003e \u003c\/span\u003eULN2003\u003cspan\u003e \u003c\/span\u003eis to amplify the control signals from the Arduino, so as to drive the 28BYJ-48 Stepper Motor.\u003c\/p\u003e\n\u003cp\u003eIf you will give the\u003cspan\u003e \u003c\/span\u003eULN2003 stepper drive\u003ca href=\"https:\/\/robu.in\/product\/uln2003-driver-module-stepper-motor-driver\/\" target=\"_blank\"\u003er\u003c\/a\u003e\u003cspan\u003e \u003c\/span\u003ea certain pulse signal, it will drive step motor to a certain angle. The control of\u003cspan\u003e \u003c\/span\u003eStepper Motor\u003cspan\u003e \u003c\/span\u003emovement angle is done by controlling the number of stepper motor driver pulses. The speed of the stepper motor rotation is also controllable by controlling the frequency of the pulses.\u003c\/p\u003e\n\u003ch5\u003eSpecifications\u003c\/h5\u003e\n\u003cul\u003e\n\u003cli\u003eReduction Ratio: 1:64\u003c\/li\u003e\n\u003cli\u003eStep Angle: 5.625\u003c\/li\u003e\n\u003cli\u003eVoltage: 12V\u003c\/li\u003e\n\u003cli\u003eDiameter: 28mm\u003c\/li\u003e\n\u003cli\u003e5-Line 4-phase can be driven by ordinary ULN2003 chip ,can also be connected in phase 2 development board used for supporting the use of a direct plug and easy to use stepper motor used in the development board\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003cp\u003e\u003cimg alt=\"\" src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/MOT5002_480x480.jpg?v=1592218660\"\u003e\u003c\/p\u003e\n\u003ch5\u003eResources\u003c\/h5\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/DATASHEET\/tree\/master\/MOTORS\/MOT5002\"\u003eDatasheet\u003c\/a\u003e\u003c\/p\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/SAMPLE_CODE\/tree\/master\/MOTORS\/MOT5002\"\u003eSample Code\u003c\/a\u003e\u003c\/p\u003e\n\u003ch5\u003eTutorial\u003c\/h5\u003e\n\u003ciframe src=\"https:\/\/www.youtube.com\/embed\/MScMUaWcIH0\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e \u003ciframe src=\"https:\/\/www.youtube.com\/embed\/4iRvjBwAzrM\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e\n\u003cp\u003e \u003c\/p\u003e","published_at":"2022-12-06T11:28:27+05:30","created_at":"2018-08-31T15:11:10+05:30","vendor":"ThinkRobotics","type":"Stepper Motor","tags":["12V","12v stepper motor","28BYJ-48","Arduino","Gearmotor","Gearmotors","MOT5","Motor","SERVO-MTR","Stepper Motor","ZOHO UPDATED"],"price":37599,"price_min":37599,"price_max":37599,"available":false,"price_varies":false,"compare_at_price":45999,"compare_at_price_min":45999,"compare_at_price_max":45999,"compare_at_price_varies":false,"variants":[{"id":12739681353800,"title":"Default Title","option1":"Default Title","option2":null,"option3":null,"sku":"MOT5002","requires_shipping":true,"taxable":true,"featured_image":null,"available":false,"name":"Stepper Motor (12V 4-Phase 5-Wire) - 28BYJ-48 with ULN2003","public_title":null,"options":["Default Title"],"price":37599,"weight":55,"compare_at_price":45999,"inventory_management":"shopify","barcode":"MOT5002","requires_selling_plan":false,"selling_plan_allocations":[],"quantity_rule":{"min":1,"max":null,"increment":1}}],"images":["\/\/thinkrobotics.com\/cdn\/shop\/products\/1_2ef44bd8-c664-4692-a7df-b384d7d7cdd0.jpg?v=1577796116","\/\/thinkrobotics.com\/cdn\/shop\/products\/28BYJ-48-Pinout-Wirings.png?v=1577796116"],"featured_image":"\/\/thinkrobotics.com\/cdn\/shop\/products\/1_2ef44bd8-c664-4692-a7df-b384d7d7cdd0.jpg?v=1577796116","options":["Title"],"media":[{"alt":"Stepper Motor","id":802407481416,"position":1,"preview_image":{"aspect_ratio":1.0,"height":600,"width":600,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/1_2ef44bd8-c664-4692-a7df-b384d7d7cdd0.jpg?v=1577796116"},"aspect_ratio":1.0,"height":600,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/1_2ef44bd8-c664-4692-a7df-b384d7d7cdd0.jpg?v=1577796116","width":600},{"alt":"Stepper Motor","id":802227454024,"position":2,"preview_image":{"aspect_ratio":1.316,"height":491,"width":646,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/28BYJ-48-Pinout-Wirings.png?v=1577796116"},"aspect_ratio":1.316,"height":491,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/28BYJ-48-Pinout-Wirings.png?v=1577796116","width":646}],"requires_selling_plan":false,"selling_plan_groups":[],"content":"\u003cp\u003eMini Stepper Motor for Lighter projects requiring precise geared control.\u003c\/p\u003e\n\u003cp\u003eThe motor has a reduction ratio of 64:1, so it offers a decent torque for its size at speeds of about 15 RPM. It is a unipolar stepper motor which has 5-wires.\u003c\/p\u003e\n\u003cp\u003eAs stated before the pack contains ULN2003 Stepper Motor Driver\u003cspan\u003e \u003c\/span\u003ewhich is a Mini Stepper Motor Driver. The main purpose of\u003cspan\u003e \u003c\/span\u003eULN2003\u003cspan\u003e \u003c\/span\u003eis to amplify the control signals from the Arduino, so as to drive the 28BYJ-48 Stepper Motor.\u003c\/p\u003e\n\u003cp\u003eIf you will give the\u003cspan\u003e \u003c\/span\u003eULN2003 stepper drive\u003ca href=\"https:\/\/robu.in\/product\/uln2003-driver-module-stepper-motor-driver\/\" target=\"_blank\"\u003er\u003c\/a\u003e\u003cspan\u003e \u003c\/span\u003ea certain pulse signal, it will drive step motor to a certain angle. The control of\u003cspan\u003e \u003c\/span\u003eStepper Motor\u003cspan\u003e \u003c\/span\u003emovement angle is done by controlling the number of stepper motor driver pulses. The speed of the stepper motor rotation is also controllable by controlling the frequency of the pulses.\u003c\/p\u003e\n\u003ch5\u003eSpecifications\u003c\/h5\u003e\n\u003cul\u003e\n\u003cli\u003eReduction Ratio: 1:64\u003c\/li\u003e\n\u003cli\u003eStep Angle: 5.625\u003c\/li\u003e\n\u003cli\u003eVoltage: 12V\u003c\/li\u003e\n\u003cli\u003eDiameter: 28mm\u003c\/li\u003e\n\u003cli\u003e5-Line 4-phase can be driven by ordinary ULN2003 chip ,can also be connected in phase 2 development board used for supporting the use of a direct plug and easy to use stepper motor used in the development board\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003cp\u003e\u003cimg alt=\"\" src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/MOT5002_480x480.jpg?v=1592218660\"\u003e\u003c\/p\u003e\n\u003ch5\u003eResources\u003c\/h5\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/DATASHEET\/tree\/master\/MOTORS\/MOT5002\"\u003eDatasheet\u003c\/a\u003e\u003c\/p\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/SAMPLE_CODE\/tree\/master\/MOTORS\/MOT5002\"\u003eSample Code\u003c\/a\u003e\u003c\/p\u003e\n\u003ch5\u003eTutorial\u003c\/h5\u003e\n\u003ciframe src=\"https:\/\/www.youtube.com\/embed\/MScMUaWcIH0\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e \u003ciframe src=\"https:\/\/www.youtube.com\/embed\/4iRvjBwAzrM\" height=\"315\" width=\"560\" allowfullscreen=\"\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" frameborder=\"0\"\u003e\u003c\/iframe\u003e\n\u003cp\u003e \u003c\/p\u003e"}
3D printed parts are of low finish. Lot.of sharp edges on parts. Also the fitment of the parts are not happening because of excess material. Most often the parts have to be filed or reworked. Screws are given in exact number as needed. If one screw is missed, then the assembly is impossible
The consignment was not dispatched as per committed date and had to pursue for dispatch information. The courier didn,t deliver us despit lying in Jaipur and we had to personally collect it from Courier Hub adding to inconvenience. The logistics need to be improved. Just a feedback.
Bought this from this website, stopped working within a month. Support made me wait for weeks, slow response.
At the end the Abhiram from the technical team tells me I should take it to some local electrical repair person who might be able to change the element.
Disgusting quality and service. I was told it does come under warranty but still no solution.
I've sent them photos, videos, nothing. Disgusting service.