







Welcome to the discussion thread for 37mm DC Metal Geared Motors with Encoder
Feel free to ask questions, share tips or report issues.
Feel free to ask questions, share tips or report issues.
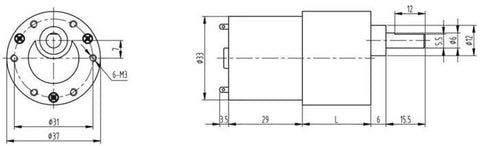
Measuring 37 mm (1.46″) in diameter, these 12V and 24V motors are capable of offering huge amounts of torque in a reasonable package. They are available in a range of gear ratios.
With quadrature encoders added to the micro metal gearmotors (with extended back shaft), these motors use a magnetic disc and hall effect sensors to provide 11 counts per revolution of the motor shaft. The sensors operate from 3.3 V to 5 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit.
NOTE: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
Following are specifications for 12V motors -
|
Variant |
Reduction |
Load Speed |
Max. Efficiency |
Stall Torque |
Gear Box Length |
|
6 RPM |
500 |
5 |
41 |
BANNED |
29mm |
|
17 RPM |
377 |
14 |
13.8 |
50 |
26.5mm |
|
53 RPM |
171 |
42 |
4.6 |
16.8 |
25mm |
|
100 RPM |
103 |
67 |
2.9 |
10.5 |
23mm |
|
300 RPM |
46 |
202 |
0.96 |
3.5 |
21mm |
Following are specifications for 24V motors -
| Variant | Reduction Ratio |
Load Speed (RPM) |
Max. Efficiency (Torque, Kg-cm) |
Stall Torque (Kg-cm) |
Gear Box Length |
| 12 RPM | 506 | 9 | 50 | BANNED | 29 mm |
| 35 RPM | 168 | 28 | 19 | 60 | 26.5 mm |
| 107 RPM | 56 | 85 | 6.3 | 25 | 24 mm |
| 200 RPM | 30 | 137 | 4 | 15.5 | 24 mm |
| 600 RPM | 10 | 410 | 1.2 | 5.2 | 22 mm |

No reviews yet. Be the first to share your experience!
Discover More In:
Category: View all Metal Gearmotors




Fill out the form below and our team will get back to you with bulk pricing.
Measuring 37 mm (1.46″) in diameter, these 12V and 24V motors are capable of offering huge amounts of torque in a reasonable package. They are available in a range of gear ratios.
With quadrature encoders added to the micro metal gearmotors (with extended back shaft), these motors use a magnetic disc and hall effect sensors to provide 11 counts per revolution of the motor shaft. The sensors operate from 3.3 V to 5 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit.
NOTE: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
Following are specifications for 12V motors -
|
Variant |
Reduction |
Load Speed |
Max. Efficiency |
Stall Torque |
Gear Box Length |
|
6 RPM |
500 |
5 |
41 |
BANNED |
29mm |
|
17 RPM |
377 |
14 |
13.8 |
50 |
26.5mm |
|
53 RPM |
171 |
42 |
4.6 |
16.8 |
25mm |
|
100 RPM |
103 |
67 |
2.9 |
10.5 |
23mm |
|
300 RPM |
46 |
202 |
0.96 |
3.5 |
21mm |
Following are specifications for 24V motors -
| Variant | Reduction Ratio |
Load Speed (RPM) |
Max. Efficiency (Torque, Kg-cm) |
Stall Torque (Kg-cm) |
Gear Box Length |
| 12 RPM | 506 | 9 | 50 | BANNED | 29 mm |
| 35 RPM | 168 | 28 | 19 | 60 | 26.5 mm |
| 107 RPM | 56 | 85 | 6.3 | 25 | 24 mm |
| 200 RPM | 30 | 137 | 4 | 15.5 | 24 mm |
| 600 RPM | 10 | 410 | 1.2 | 5.2 | 22 mm |
No reviews yet. Be the first to share your experience!
Discover More In:
Category: View all Metal Gearmotors
Fill out the form below and our team will get back to you with bulk pricing.
Custom Requirements?
Related products



