


















Welcome to the discussion thread for MaxArm Open Source Robot Arm Powered by ESP32
Feel free to ask questions, share tips or report issues.
Feel free to ask questions, share tips or report issues.

MaxArm is an open-source robotic arm powered by ESP32 microcontroller. The linkage mechanism designed body are equipped with high-quality bus servos and suction nozzle. Using inverse kinematics technology, MaxArm can execute variety of tasks such as object sorting, picking, transporting and stacking.
Supporting Python and Arduino programming and Wi-Fi and Bluetooth communications, MaxArm can also be controlled by APP, PC software, wireless remote controller and mouse control. It also supports variety of sensors to turn your creative AI ideas into reality!


Linkage Mechanism Improves EfficiencyUsing the linkage mechanism designed body, MaxArm greatly improves its joints efficiency so as to allow the end effector move along x-y-z axes. |

Compact Structural DesignMade from hard aluminium alloy and carbon fiber for high quality. The metal bearings for smoother and more accurate joint movement. Compact design gets the body small and flexible. |
 |
Provide Linkage Coordinate System DiagramBased on ESP32 development platform, the inverse kinematics analysis and DH model of MaxArm are available, which allows you to deeply comprehend the working principle of MaxArm. |
|
Linkage Inversion Solution, Easy ControlBy inputting the coordinate of the end effector, Inverse kinematics can calculate the angle of each servo to facilitate the action debugging. (Provide the function source code of inverse kinematics) |
 |
|


AI Fan (Face Tracking) |

Color Sorting |

Waste Sorting |

Mask Recognition |
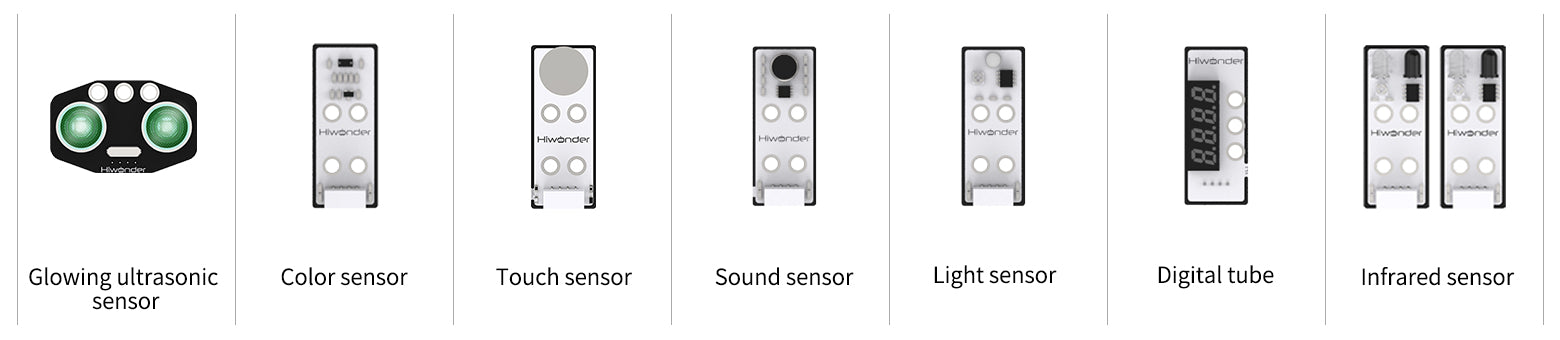
Compatible with glowing ultrasonic sensor, infrared sensor, color sensor, touch sensor and other electronic modules, MaxArm converts more creative ideas into reality!
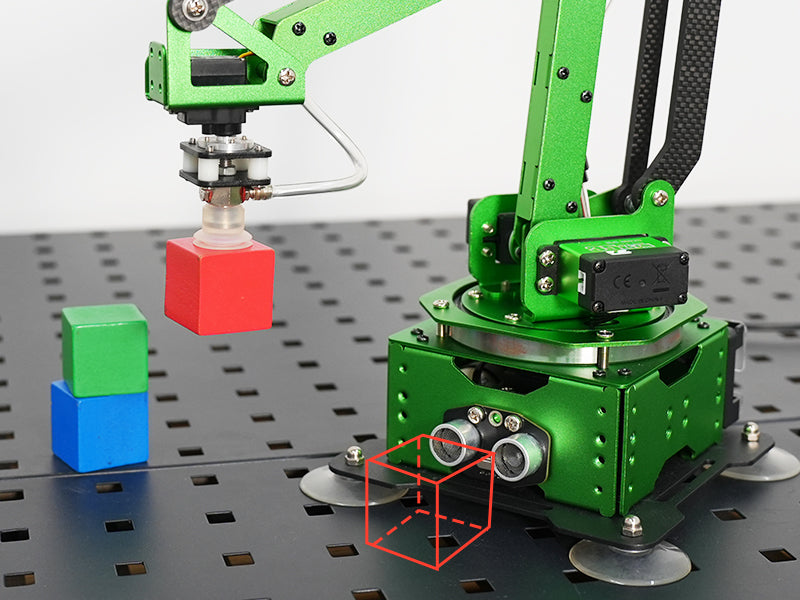
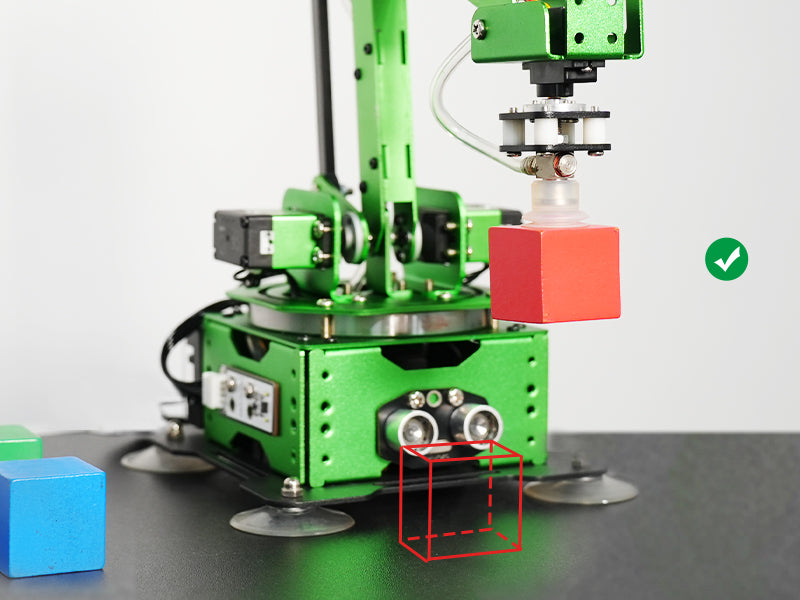
Ultrasonic Detection and StackingWith ultrasonic sensor, MaxArm can perform intelligent stacking after detecting the blocks. |
Touch Detection and PlacementWith touch sensor, MaxArm can detect the touch action and place the blocks. |
Color SortingWith color sensor, MaxArm can recognize and sort the target color. |
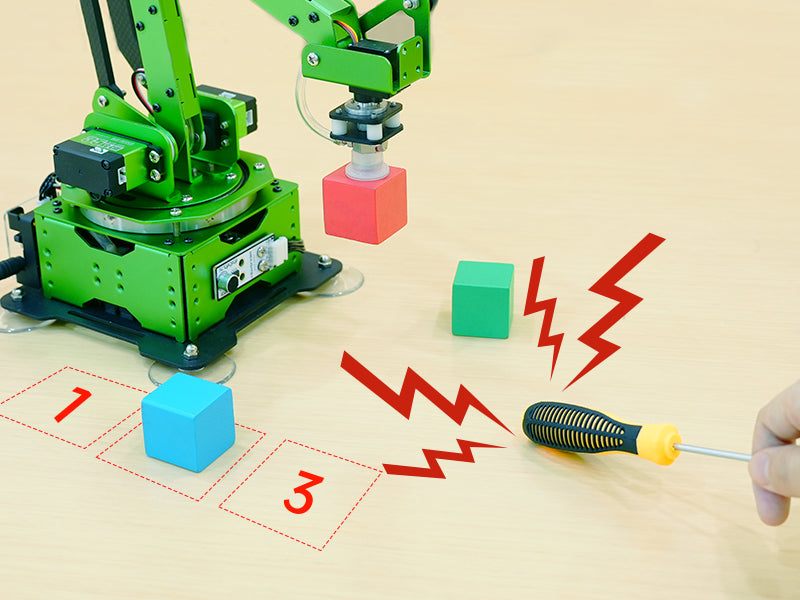
Intelligent Sound ControlWith sound sensor, MaxArm can place the blocks in the corresponding position by recognizing the number of knocks. |
Through the reserved holes in the base, MaxArm can be easily assembled on the sliding rail. It can perform block picking and transporting to simulate industrial application scenarios.




MaxArm uses Python by default, which is easy to learn. |

Program MaxArm with Arduino IDE software. |

|
|

PC Software |
Wireless Controller |

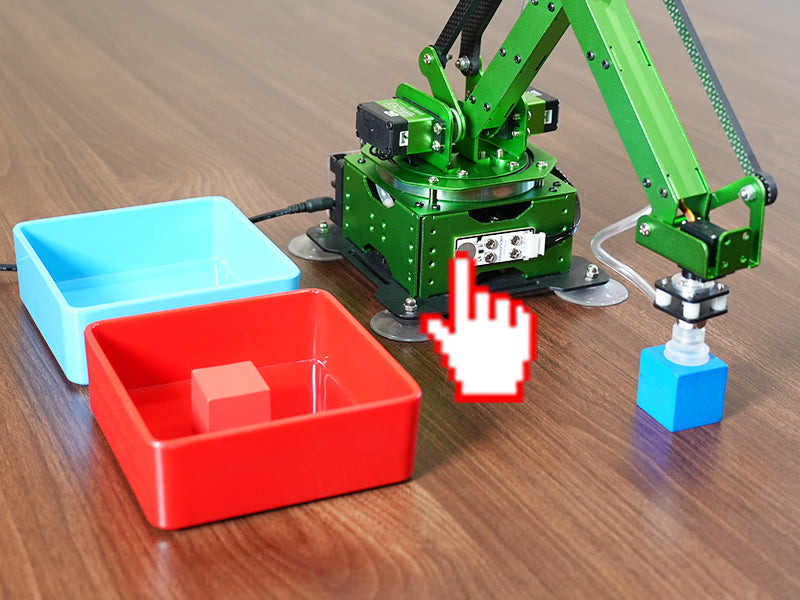
Mouse Control |


| Item | Specification |
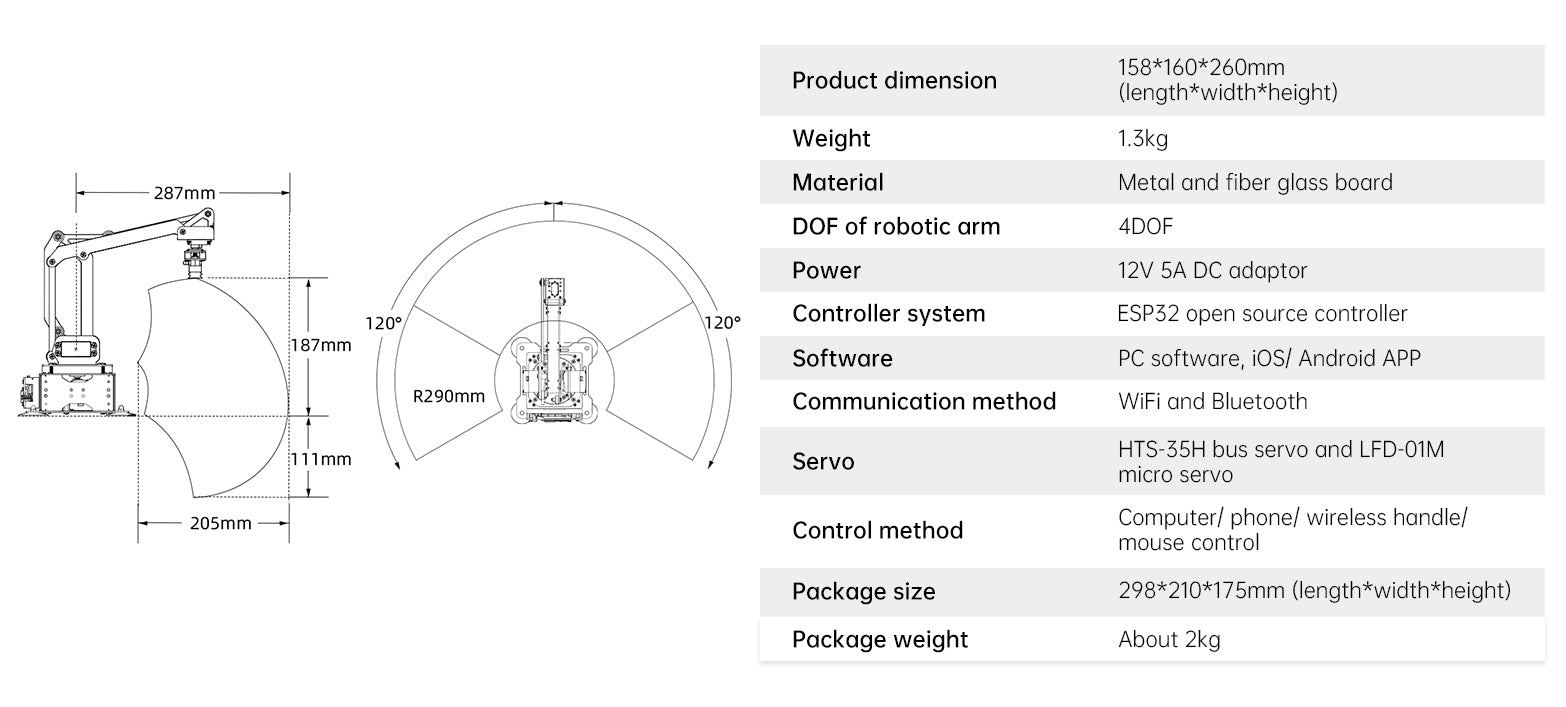
| Product dimension | 158*160*260mm (length*width*height) |
| Weight | 1.3kg |
| Material | Metal and fiber glass board |
| DOF of robotic arm | 4DOF |
| Power | 12V 5A DC adaptor |
| Controller system | ESP32 open source controller |
| Software | PC software, iOS/ Android APP |
| Communication method | WiFi and Bluetooth |
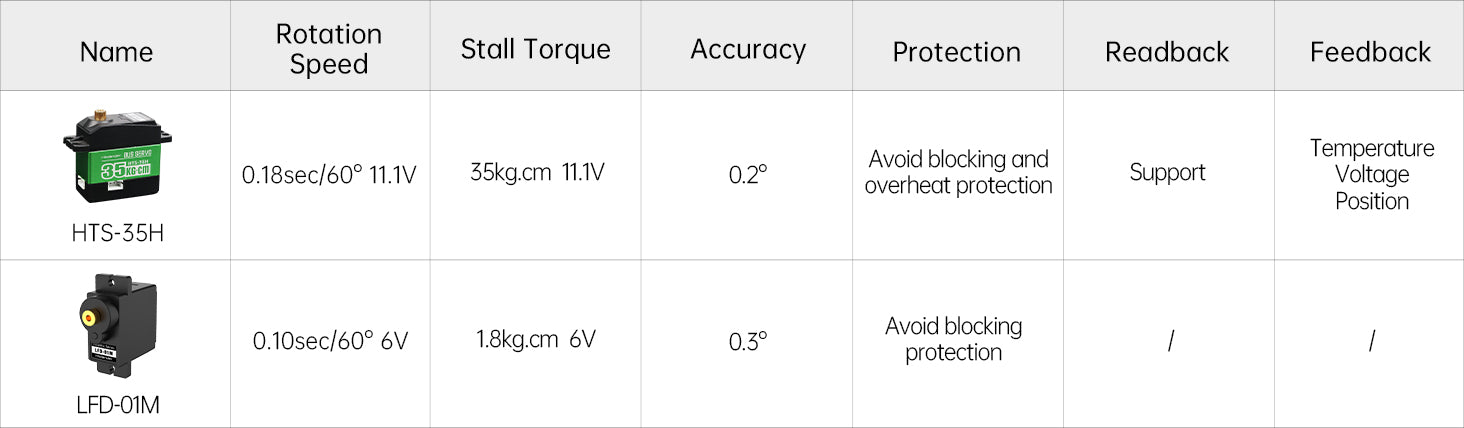
| Servo | HTS-35H bus servo and LFD-01M micro servo |
| Control method | Computer/ phone/ wireless handle/ mouse control |
| Package size | 298*210*175mm (length*width*height) |
| Package weight | About 2kg |
| Starter kit | Robotic arm (assembled) * 1 12V 5A power adapter * 1 Blocks (3*3cm) * 1 USB cable * 1 Suction cup * 4 Screwdriver * 1 |
| Standard kit | Starter kit *1 Wireless handle controller * 1 Glowing ultrasonic sensor * 1 Color sensor * 1 Touch sensor * 1 Sound sensor * 1 Light sensor * 1 Digital tube * 1 Infrared sensor * 2 4 PIN wire (30cm) * 3 Screw bag * 1 |
| Advanced kit | Standard kit *1 WonderCam AI vision module * 1 (metal brackets included) Fan module * 1 Dot matrix module * 1 4 PIN wire (50cm) * 3 |
| Developer kit | Advanced kit *1 Sliding rail bracket * 1 Sliding rail * 1 |
No reviews yet. Be the first to share your experience!
For more discussion Click Here
Discover More In:
Category: View similar items (MaxArm)




Fill out the form below and our team will get back to you with bulk pricing.
MaxArm is an open-source robotic arm powered by ESP32 microcontroller. The linkage mechanism designed body are equipped with high-quality bus servos and suction nozzle. Using inverse kinematics technology, MaxArm can execute variety of tasks such as object sorting, picking, transporting and stacking.
Supporting Python and Arduino programming and Wi-Fi and Bluetooth communications, MaxArm can also be controlled by APP, PC software, wireless remote controller and mouse control. It also supports variety of sensors to turn your creative AI ideas into reality!
Linkage Mechanism Improves EfficiencyUsing the linkage mechanism designed body, MaxArm greatly improves its joints efficiency so as to allow the end effector move along x-y-z axes. |
Compact Structural DesignMade from hard aluminium alloy and carbon fiber for high quality. The metal bearings for smoother and more accurate joint movement. Compact design gets the body small and flexible. |
|
Provide Linkage Coordinate System DiagramBased on ESP32 development platform, the inverse kinematics analysis and DH model of MaxArm are available, which allows you to deeply comprehend the working principle of MaxArm. |
|
Linkage Inversion Solution, Easy ControlBy inputting the coordinate of the end effector, Inverse kinematics can calculate the angle of each servo to facilitate the action debugging. (Provide the function source code of inverse kinematics) |
|
|
AI Fan (Face Tracking) |
Color Sorting |
Waste Sorting |
Mask Recognition |
Compatible with glowing ultrasonic sensor, infrared sensor, color sensor, touch sensor and other electronic modules, MaxArm converts more creative ideas into reality!
Ultrasonic Detection and StackingWith ultrasonic sensor, MaxArm can perform intelligent stacking after detecting the blocks. |
Touch Detection and PlacementWith touch sensor, MaxArm can detect the touch action and place the blocks. |
Color SortingWith color sensor, MaxArm can recognize and sort the target color. |
Intelligent Sound ControlWith sound sensor, MaxArm can place the blocks in the corresponding position by recognizing the number of knocks. |
Through the reserved holes in the base, MaxArm can be easily assembled on the sliding rail. It can perform block picking and transporting to simulate industrial application scenarios.
MaxArm uses Python by default, which is easy to learn. |
Program MaxArm with Arduino IDE software. |
|
|
PC Software |
Wireless Controller |
Mouse Control |
| Item | Specification |
| Product dimension | 158*160*260mm (length*width*height) |
| Weight | 1.3kg |
| Material | Metal and fiber glass board |
| DOF of robotic arm | 4DOF |
| Power | 12V 5A DC adaptor |
| Controller system | ESP32 open source controller |
| Software | PC software, iOS/ Android APP |
| Communication method | WiFi and Bluetooth |
| Servo | HTS-35H bus servo and LFD-01M micro servo |
| Control method | Computer/ phone/ wireless handle/ mouse control |
| Package size | 298*210*175mm (length*width*height) |
| Package weight | About 2kg |
| Starter kit | Robotic arm (assembled) * 1 12V 5A power adapter * 1 Blocks (3*3cm) * 1 USB cable * 1 Suction cup * 4 Screwdriver * 1 |
| Standard kit | Starter kit *1 Wireless handle controller * 1 Glowing ultrasonic sensor * 1 Color sensor * 1 Touch sensor * 1 Sound sensor * 1 Light sensor * 1 Digital tube * 1 Infrared sensor * 2 4 PIN wire (30cm) * 3 Screw bag * 1 |
| Advanced kit | Standard kit *1 WonderCam AI vision module * 1 (metal brackets included) Fan module * 1 Dot matrix module * 1 4 PIN wire (50cm) * 3 |
| Developer kit | Advanced kit *1 Sliding rail bracket * 1 Sliding rail * 1 |
No reviews yet. Be the first to share your experience!
For more discussion Click Here
Discover More In:
Category: View similar items (MaxArm)
Fill out the form below and our team will get back to you with bulk pricing.
Custom Requirements?
Related products



