
























Welcome to the discussion thread for Transbot ROS Robot with Lidar Depth camera for Jetson NANO
Feel free to ask questions, share tips or report issues.
Feel free to ask questions, share tips or report issues.
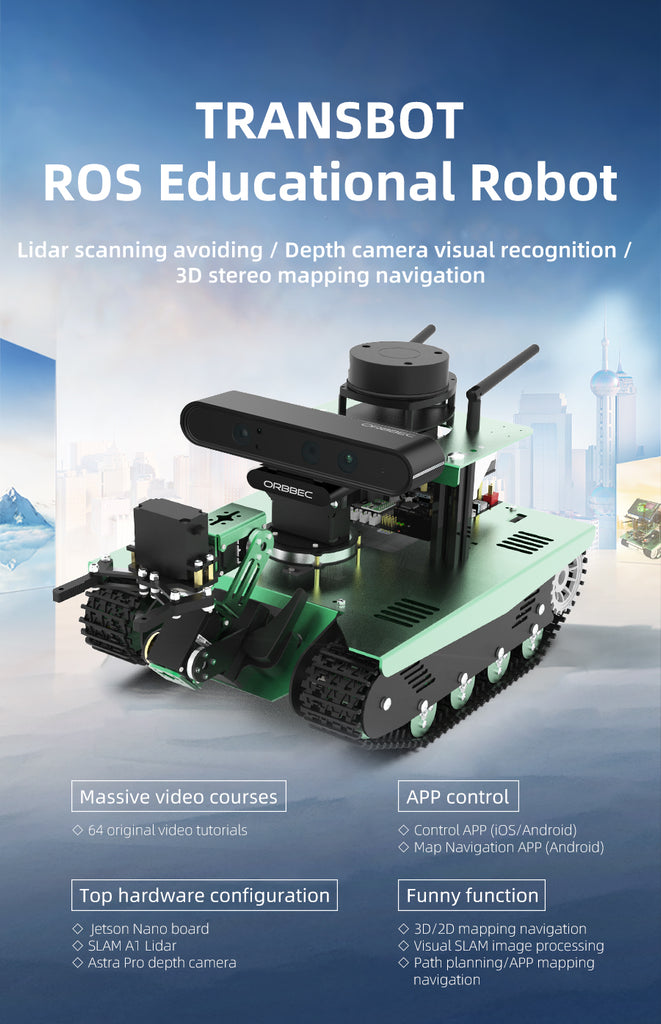
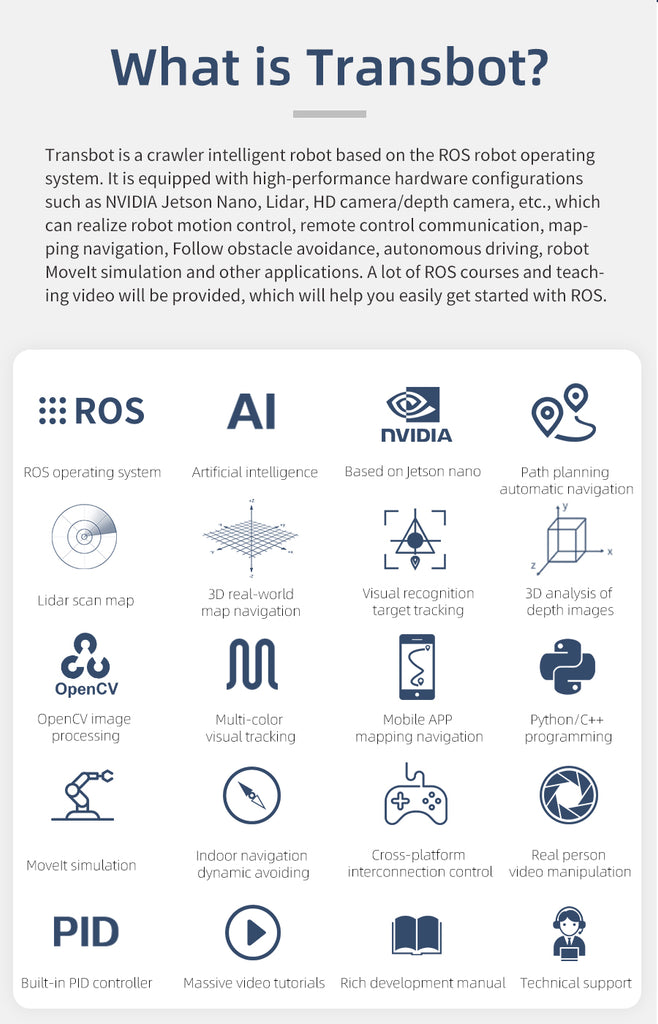
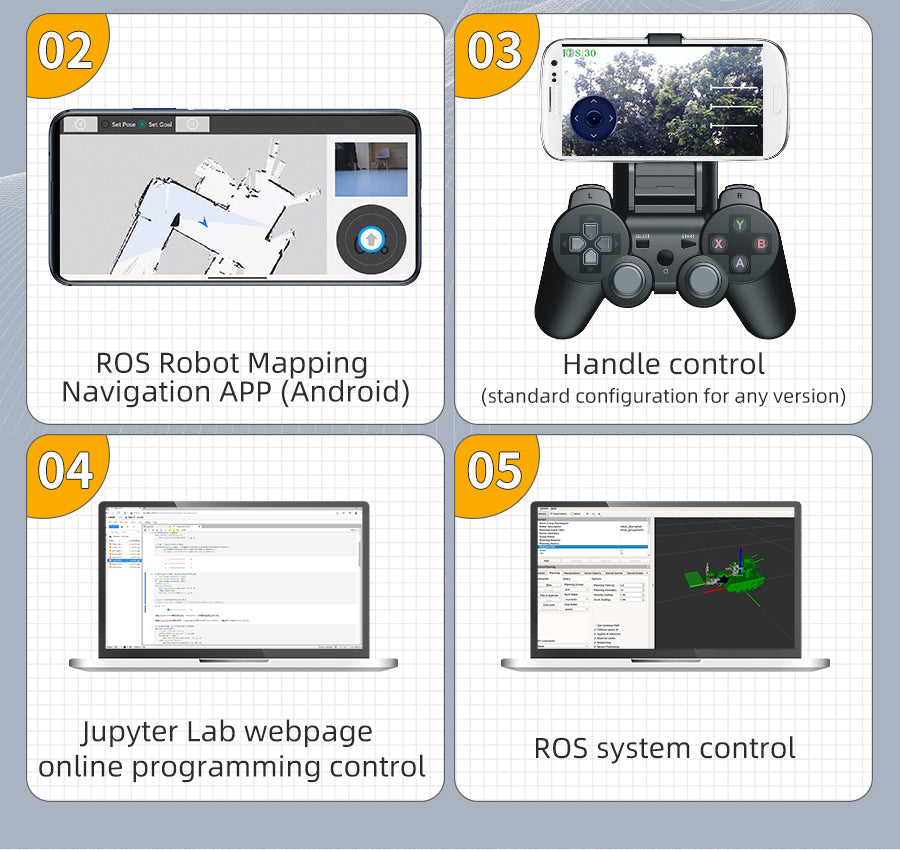
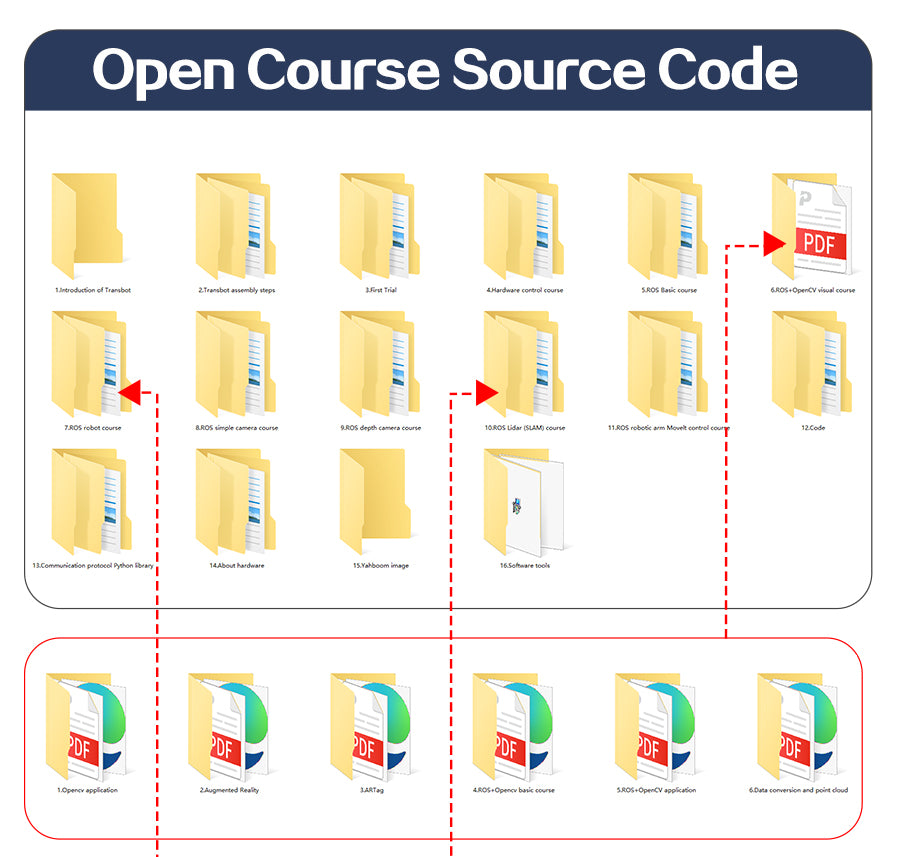
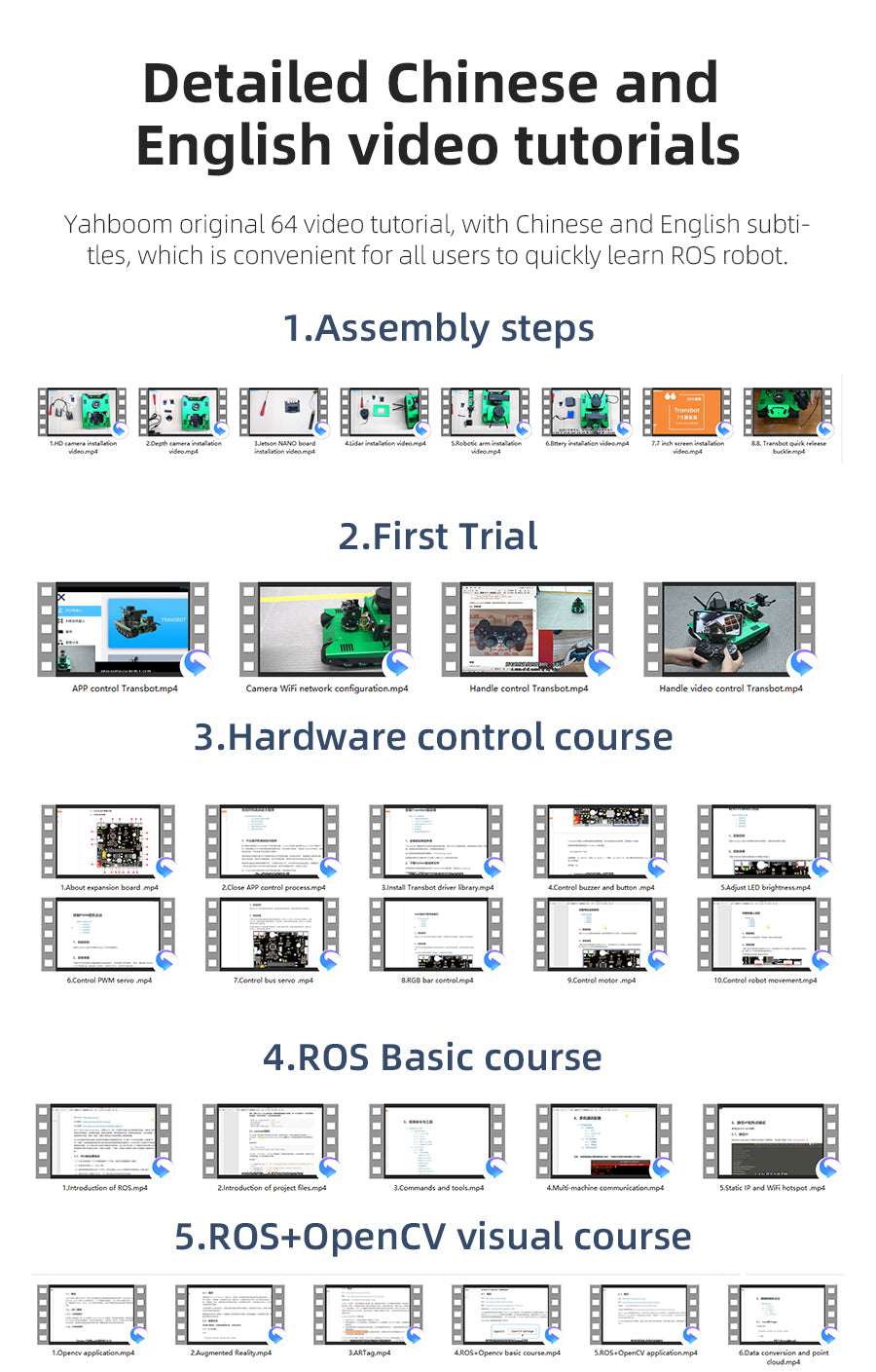
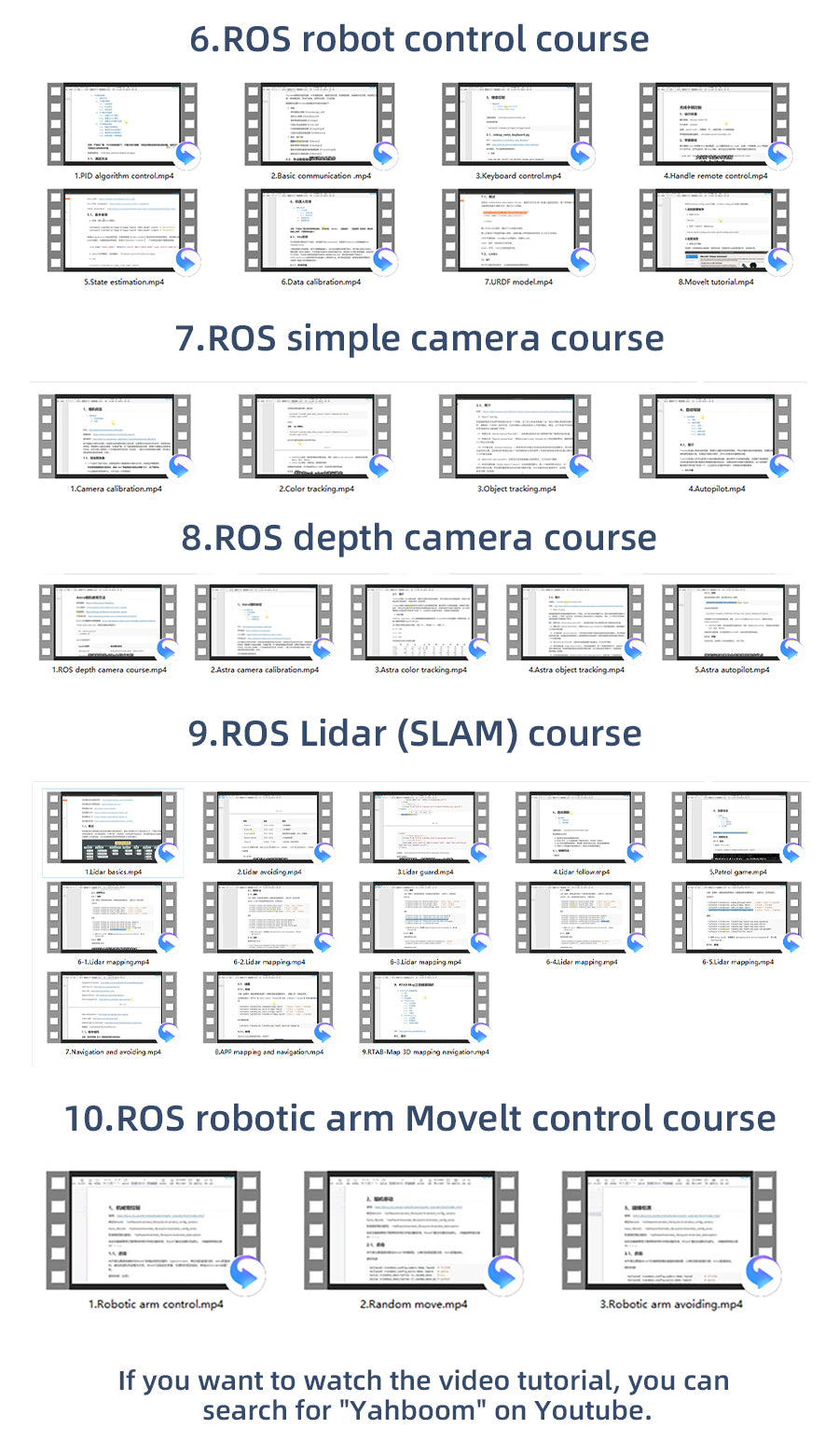
Transbot is a crawler off-road robot based on ROS(robot operating system) and Python programming, which is designed for ROS enthusiasts and robot players. It is equipped with high-performance hardware configurations such as Jetson NANO, Lidar, HD camera/depth camera, etc., which can realize applications such as robot motion control, remote communication, mapping navigation, following-avoiding, autopilot and robotic arm MoveIt simulation. A lot of teaching course documents and videos to help you get started with ROS easily.
SOME VARIANTS MAY HAVE A LEAD TIME OF 2-3 WEEKS.
Yahboom Transbot ROS Educational Robot

















No reviews yet. Be the first to share your experience!




Fill out the form below and our team will get back to you with bulk pricing.
Transbot is a crawler off-road robot based on ROS(robot operating system) and Python programming, which is designed for ROS enthusiasts and robot players. It is equipped with high-performance hardware configurations such as Jetson NANO, Lidar, HD camera/depth camera, etc., which can realize applications such as robot motion control, remote communication, mapping navigation, following-avoiding, autopilot and robotic arm MoveIt simulation. A lot of teaching course documents and videos to help you get started with ROS easily.
SOME VARIANTS MAY HAVE A LEAD TIME OF 2-3 WEEKS.
Yahboom Transbot ROS Educational Robot
No reviews yet. Be the first to share your experience!
Fill out the form below and our team will get back to you with bulk pricing.
Custom Requirements?
Related products



