Based on ESP32, supports WIFI and UART communication, Provides multiple motion models and cross-platform Web application Supports multiple host computers
Features At A Glance
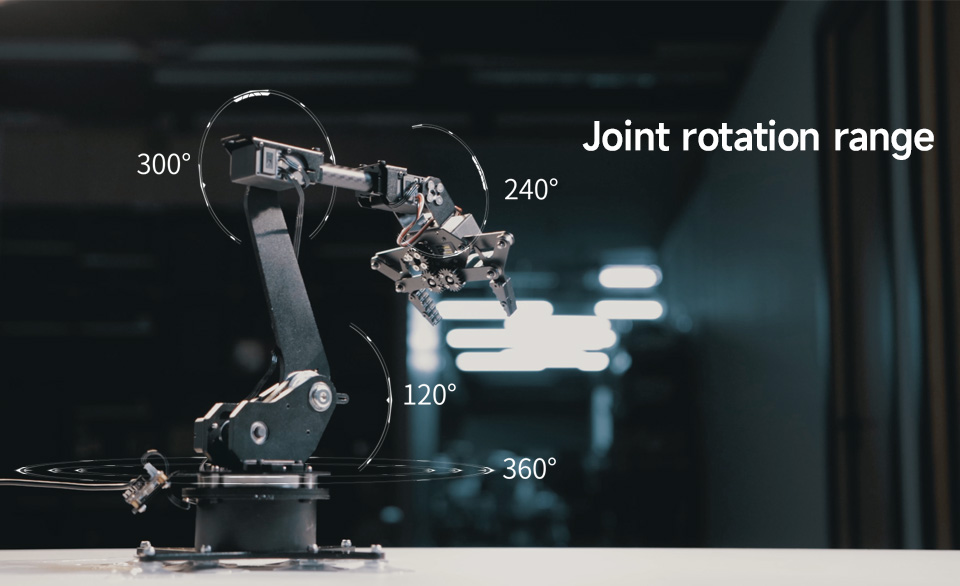
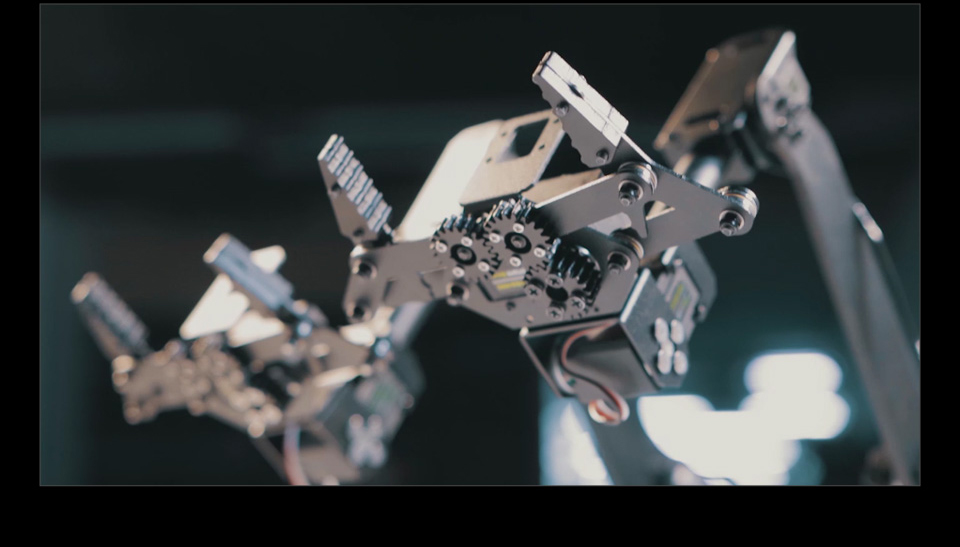
RoArm-M1 is a serial robotic arm with 5-DOF in total, including the clamping freedom of the gripper
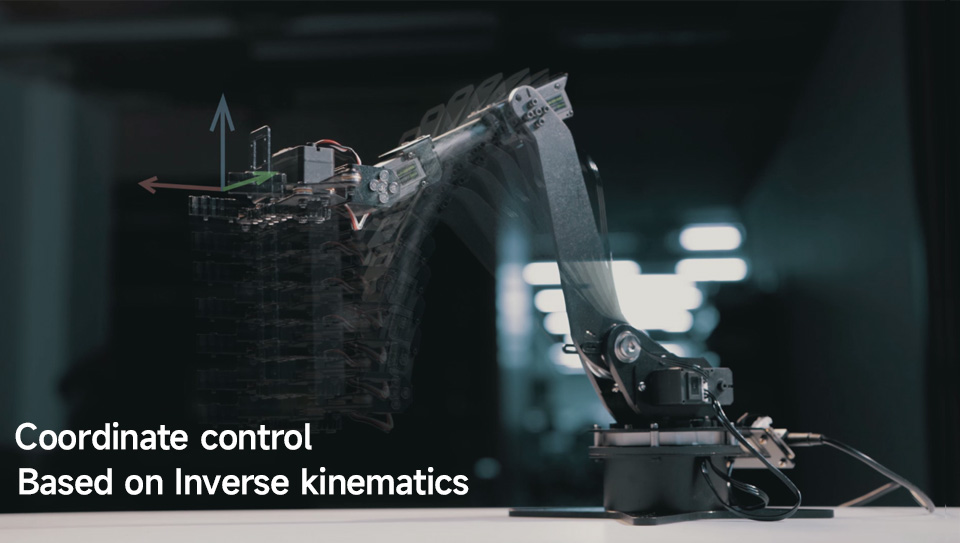
Two control methods in demo: Angle control and Coordinate control
Supports Leading-following mode based on ESP-NOW
Supports motion recording and replaying control mode
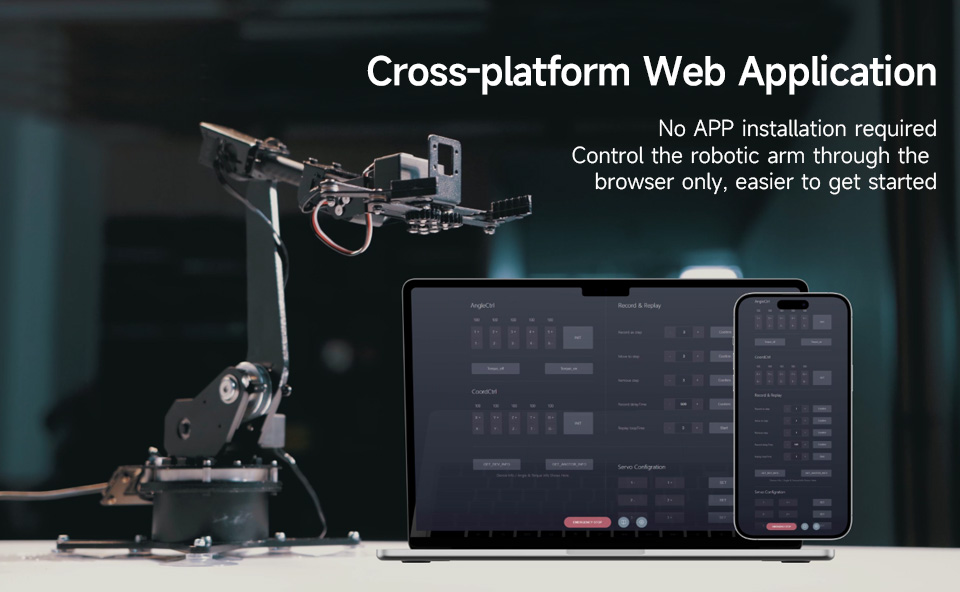
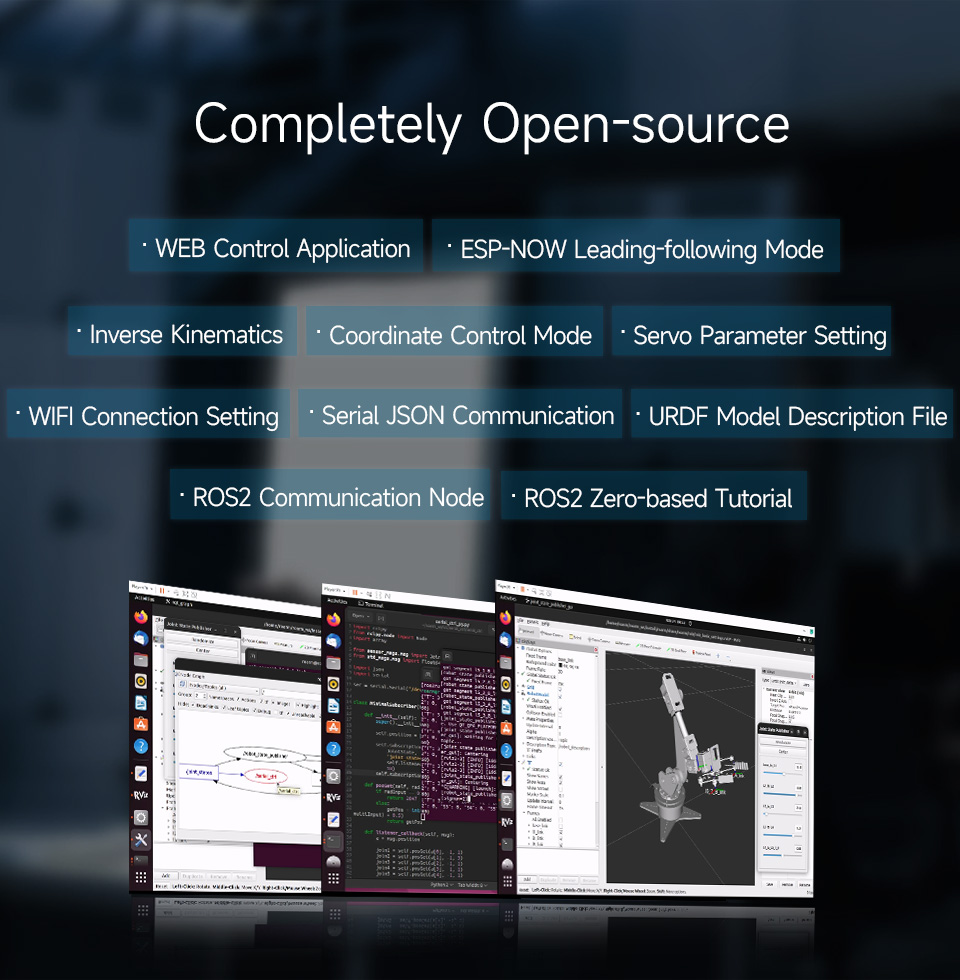
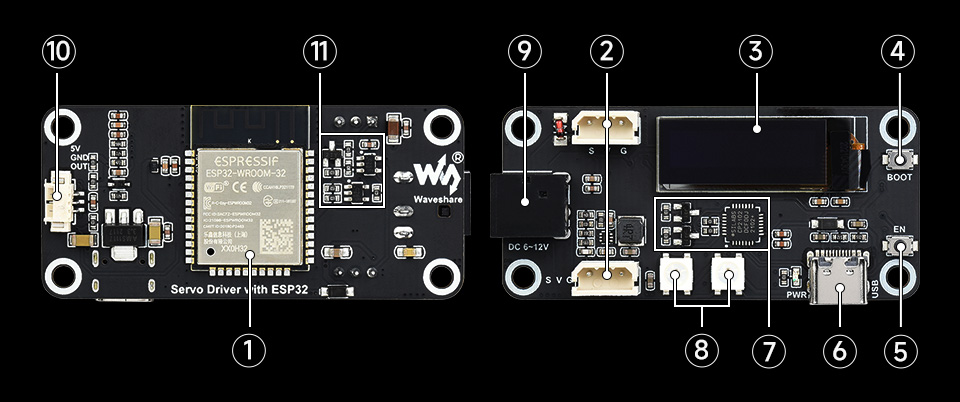
Based on ESP32, supports WIFI and UART communication, provides multiple motion model demos and cross-platform Web application
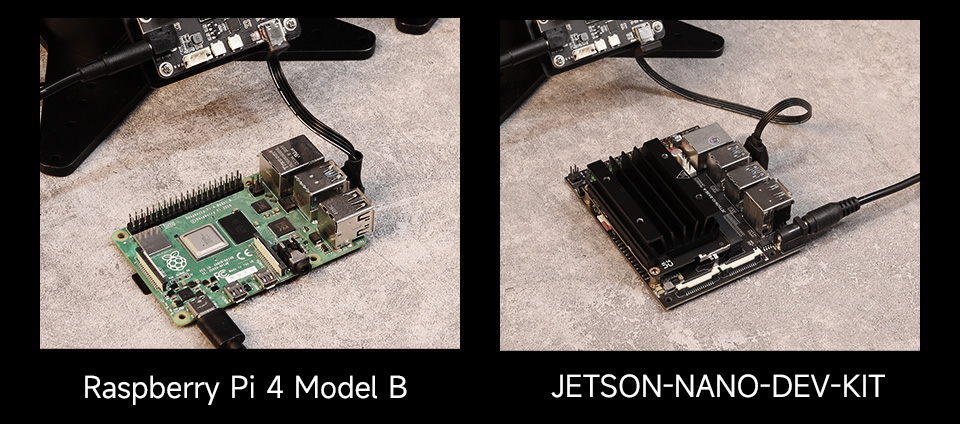
Supports multiple host computers, provides ROS 2 demo and other rich learning resources
Two week lead time if the product is in pre-order.
Please note that although my status in your website shows fulfilled, my components haven't arrived yet. I am extremely disappointed by the poor coordination between your team and the delivery team.
Three of the four ports stopped working after usage for sometime. After more usage using the fourth port only, the fourth port also stopped working in 3 days. Very bad experience. Please return or replace.
{"id":8083739214141,"title":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","handle":"5-dof-robot-arm-kit-with-high-torque-serial-bus-servo","description":"\u003ch2 style=\"text-align: center;\"\u003eHigh-Torque Serial Bus Servo Desktop Robotic Arm\u003c\/h2\u003e\n\u003ch3 style=\"text-align: center;\"\u003eBased on ESP32, supports WIFI and UART communication,\u003cbr\u003eProvides multiple motion models and cross-platform Web application\u003cbr\u003eSupports multiple host computers\u003c\/h3\u003e\n\u003cdiv style=\"text-align: center;\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-1.jpg\" alt=\"\" style=\"float: none;\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch2 style=\"text-align: left;\" class=\"richTitle\"\u003eFeatures At A Glance\u003c\/h2\u003e\n\u003cul\u003e\n\u003cli\u003eRoArm-M1 is a serial robotic arm with 5-DOF in total, including the clamping freedom of the gripper\u003c\/li\u003e\n\u003cli\u003eTwo control methods in demo: Angle control and Coordinate control\u003c\/li\u003e\n\u003cli\u003eSupports Leading-following mode based on ESP-NOW\u003c\/li\u003e\n\u003cli\u003eSupports motion recording and replaying control mode\u003c\/li\u003e\n\u003cli\u003eBased on ESP32, supports WIFI and UART communication, provides multiple motion model demos and cross-platform Web application\u003c\/li\u003e\n\u003cli\u003eSupports multiple host computers, provides ROS 2 demo and other rich learning resources\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003cp\u003e\u003cem\u003e\u003cspan style=\"color: #ff2a00;\"\u003eTwo week lead time if the product is in pre-order.\u003c\/span\u003e\u003c\/em\u003e \u003c\/p\u003e\n\u003ch3\u003eWIKI:\u003c\/h3\u003e\n\u003cp\u003e\u003ca href=\"http:\/\/www.waveshare.com\/wiki\/RoArm-M1\" target=\"_blank\"\u003ewww.waveshare.com\/wiki\/RoArm-M1\u003c\/a\u003e\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-3.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-5.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-7.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-9.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch2 align=\"center\"\u003eHigh Strength X Light Weight\u003c\/h2\u003e\n\u003cp align=\"center\"\u003eStainless Steel Gripper - Carbon Fiber Arm - Aluminum Body\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-11.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-13.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-15.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eESP32-WROOM-32 Main Control Module\u003c\/h3\u003e\n\u003cp align=\"center\"\u003eSupport Multiple Wireless Communication Methods: 2.4G WiFi, Bluetooth 4.2, ESP-NOW\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-17.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-19.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eFlexible Control Methods\u003c\/h3\u003e\n\u003cp align=\"center\"\u003eServo torque lock can be turned on\/off, and the servo can be rotated by external force after the torque lock is turned off\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-21.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eLeading-following control mode, more flexible motion control\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-23.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eThe robot arm can record the current position and cycle by steps\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-25.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eSupport Multiple Host Computers\u003c\/h3\u003e\n\u003cp align=\"center\"\u003eThe Robotic Arm Can Be Connected To Raspberry Pi, Jetson Nano, PC And Other Host Computers Via USB cable\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\n\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-27.jpg\"\u003e\u003cbr\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-29.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-31.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eOnboard Resources\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-intro.jpg\" class=\"mgnTB\"\u003e\u003c\/div\u003e\n\u003col\u003e\n\u003cli\u003eESP32-WROOM-32 main controller\u003c\/li\u003e\n\u003cli\u003eServo control header\u003c\/li\u003e\n\u003cli\u003eOLED screen\u003c\/li\u003e\n\u003cli\u003eDownload button\u003c\/li\u003e\n\u003cli\u003eReset button\u003c\/li\u003e\n\u003cli\u003eType-C port (Download\/UART communication)\u003c\/li\u003e\n\u003cli\u003eUSB to UART circuit\u003c\/li\u003e\n\u003cli\u003eRGB LED\u003c\/li\u003e\n\u003cli\u003e12V DC power jack\u003c\/li\u003e\n\u003cli\u003eRGB LED extension port\u003c\/li\u003e\n\u003cli\u003eSerial bus servo control circuit\u003c\/li\u003e\n\u003c\/ol\u003e\n\u003cdiv\u003e\u003cbr\u003e\u003c\/div\u003e\n\u003ch3 align=\"center\"\u003eProduct Packaging\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\n\u003cbr\u003e\u003cimg class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-33.jpg\"\u003e \u003cbr\u003e\u003cimg class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-35.jpg\"\u003e\n\u003c\/div\u003e\n\u003ch3 align=\"center\"\u003eDimensions\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-size.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3\u003e\u003cstrong\u003ePackage Contents:\u003c\/strong\u003e\u003c\/h3\u003e\n\u003cul\u003e\n\u003cli\u003e\n\u003cstrong\u003eWeight: \u003c\/strong\u003e\u003cspan\u003e1.9 kg\u003c\/span\u003e\n\u003c\/li\u003e\n\u003cli\u003eRoArm-M1 and package box x1\u003c\/li\u003e\n\u003cli\u003e12V 5A power supply x1\u003c\/li\u003e\n\u003c\/ul\u003e","published_at":"2023-01-19T17:09:31+05:30","created_at":"2023-01-19T16:32:42+05:30","vendor":"Waveshare","type":"","tags":["23937","5DOF","6 DOF Robot Arm Controller","AI VISION ROBOT","DIY Robot","DIY Robotics","DIY-KIT","EDU-KIT","educational robot","Educational Robot Kit","RBT-ARM","RBT-KIT","Robot","robot arm","Robot Arm Kit","robot kit","robotics","robotics kit","ROS","ROS robot","VISION ROBOT","Waveshare","WVSH","ZOHO UPDATED"],"price":3664999,"price_min":3664999,"price_max":3664999,"available":true,"price_varies":false,"compare_at_price":null,"compare_at_price_min":0,"compare_at_price_max":0,"compare_at_price_varies":false,"variants":[{"id":44393991143741,"title":"Default Title","option1":"Default Title","option2":null,"option3":null,"sku":"WVSH0254","requires_shipping":true,"taxable":true,"featured_image":null,"available":true,"name":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","public_title":null,"options":["Default Title"],"price":3664999,"weight":2000,"compare_at_price":null,"inventory_management":"shopify","barcode":"WVSH0254","requires_selling_plan":false,"selling_plan_allocations":[],"quantity_rule":{"min":1,"max":null,"increment":1}}],"images":["\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-5_1.jpg?v=1675766436","\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-2_1.jpg?v=1675766436","\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-1_1.jpg?v=1675766434","\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-4_1.jpg?v=1675766429","\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-3_1.jpg?v=1675766429"],"featured_image":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-5_1.jpg?v=1675766436","options":["Title"],"media":[{"alt":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","id":32579596681533,"position":1,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-5_1.jpg?v=1675766436"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-5_1.jpg?v=1675766436","width":800},{"alt":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","id":32753357881661,"position":2,"preview_image":{"aspect_ratio":1.778,"height":1080,"width":1920,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/097bc13a59864a9684ae121eea729737.thumbnail.0000000000.jpg?v=1675766363"},"aspect_ratio":1.775,"duration":60000,"media_type":"video","sources":[{"format":"mp4","height":480,"mime_type":"video\/mp4","url":"\/\/thinkrobotics.com\/cdn\/shop\/videos\/c\/vp\/097bc13a59864a9684ae121eea729737\/097bc13a59864a9684ae121eea729737.SD-480p-1.5Mbps-12242647.mp4?v=0","width":852},{"format":"mp4","height":1080,"mime_type":"video\/mp4","url":"\/\/thinkrobotics.com\/cdn\/shop\/videos\/c\/vp\/097bc13a59864a9684ae121eea729737\/097bc13a59864a9684ae121eea729737.HD-1080p-7.2Mbps-12242647.mp4?v=0","width":1920},{"format":"mp4","height":720,"mime_type":"video\/mp4","url":"\/\/thinkrobotics.com\/cdn\/shop\/videos\/c\/vp\/097bc13a59864a9684ae121eea729737\/097bc13a59864a9684ae121eea729737.HD-720p-4.5Mbps-12242647.mp4?v=0","width":1280},{"format":"m3u8","height":1080,"mime_type":"application\/x-mpegURL","url":"\/\/thinkrobotics.com\/cdn\/shop\/videos\/c\/vp\/097bc13a59864a9684ae121eea729737\/097bc13a59864a9684ae121eea729737.m3u8?v=0","width":1920}]},{"alt":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","id":32579596812605,"position":3,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-2_1.jpg?v=1675766436"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-2_1.jpg?v=1675766436","width":800},{"alt":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","id":32579596779837,"position":4,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-1_1.jpg?v=1675766434"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-1_1.jpg?v=1675766434","width":800},{"alt":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","id":32579596714301,"position":5,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-4_1.jpg?v=1675766429"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-4_1.jpg?v=1675766429","width":800},{"alt":"5-DOF Robot Arm Kit with High-Torque Serial Bus Servo","id":32579596747069,"position":6,"preview_image":{"aspect_ratio":1.0,"height":800,"width":800,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-3_1.jpg?v=1675766429"},"aspect_ratio":1.0,"height":800,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/roarm-m1-3_1.jpg?v=1675766429","width":800}],"requires_selling_plan":false,"selling_plan_groups":[],"content":"\u003ch2 style=\"text-align: center;\"\u003eHigh-Torque Serial Bus Servo Desktop Robotic Arm\u003c\/h2\u003e\n\u003ch3 style=\"text-align: center;\"\u003eBased on ESP32, supports WIFI and UART communication,\u003cbr\u003eProvides multiple motion models and cross-platform Web application\u003cbr\u003eSupports multiple host computers\u003c\/h3\u003e\n\u003cdiv style=\"text-align: center;\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-1.jpg\" alt=\"\" style=\"float: none;\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch2 style=\"text-align: left;\" class=\"richTitle\"\u003eFeatures At A Glance\u003c\/h2\u003e\n\u003cul\u003e\n\u003cli\u003eRoArm-M1 is a serial robotic arm with 5-DOF in total, including the clamping freedom of the gripper\u003c\/li\u003e\n\u003cli\u003eTwo control methods in demo: Angle control and Coordinate control\u003c\/li\u003e\n\u003cli\u003eSupports Leading-following mode based on ESP-NOW\u003c\/li\u003e\n\u003cli\u003eSupports motion recording and replaying control mode\u003c\/li\u003e\n\u003cli\u003eBased on ESP32, supports WIFI and UART communication, provides multiple motion model demos and cross-platform Web application\u003c\/li\u003e\n\u003cli\u003eSupports multiple host computers, provides ROS 2 demo and other rich learning resources\u003c\/li\u003e\n\u003c\/ul\u003e\n\u003cp\u003e\u003cem\u003e\u003cspan style=\"color: #ff2a00;\"\u003eTwo week lead time if the product is in pre-order.\u003c\/span\u003e\u003c\/em\u003e \u003c\/p\u003e\n\u003ch3\u003eWIKI:\u003c\/h3\u003e\n\u003cp\u003e\u003ca href=\"http:\/\/www.waveshare.com\/wiki\/RoArm-M1\" target=\"_blank\"\u003ewww.waveshare.com\/wiki\/RoArm-M1\u003c\/a\u003e\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-3.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-5.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-7.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-9.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch2 align=\"center\"\u003eHigh Strength X Light Weight\u003c\/h2\u003e\n\u003cp align=\"center\"\u003eStainless Steel Gripper - Carbon Fiber Arm - Aluminum Body\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-11.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-13.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-15.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eESP32-WROOM-32 Main Control Module\u003c\/h3\u003e\n\u003cp align=\"center\"\u003eSupport Multiple Wireless Communication Methods: 2.4G WiFi, Bluetooth 4.2, ESP-NOW\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-17.jpg\"\u003e\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-19.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eFlexible Control Methods\u003c\/h3\u003e\n\u003cp align=\"center\"\u003eServo torque lock can be turned on\/off, and the servo can be rotated by external force after the torque lock is turned off\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-21.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eLeading-following control mode, more flexible motion control\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-23.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eThe robot arm can record the current position and cycle by steps\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-25.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eSupport Multiple Host Computers\u003c\/h3\u003e\n\u003cp align=\"center\"\u003eThe Robotic Arm Can Be Connected To Raspberry Pi, Jetson Nano, PC And Other Host Computers Via USB cable\u003c\/p\u003e\n\u003cdiv align=\"center\"\u003e\n\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-27.jpg\"\u003e\u003cbr\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-29.jpg\"\u003e\n\u003c\/div\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-31.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3 align=\"center\"\u003eOnboard Resources\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-intro.jpg\" class=\"mgnTB\"\u003e\u003c\/div\u003e\n\u003col\u003e\n\u003cli\u003eESP32-WROOM-32 main controller\u003c\/li\u003e\n\u003cli\u003eServo control header\u003c\/li\u003e\n\u003cli\u003eOLED screen\u003c\/li\u003e\n\u003cli\u003eDownload button\u003c\/li\u003e\n\u003cli\u003eReset button\u003c\/li\u003e\n\u003cli\u003eType-C port (Download\/UART communication)\u003c\/li\u003e\n\u003cli\u003eUSB to UART circuit\u003c\/li\u003e\n\u003cli\u003eRGB LED\u003c\/li\u003e\n\u003cli\u003e12V DC power jack\u003c\/li\u003e\n\u003cli\u003eRGB LED extension port\u003c\/li\u003e\n\u003cli\u003eSerial bus servo control circuit\u003c\/li\u003e\n\u003c\/ol\u003e\n\u003cdiv\u003e\u003cbr\u003e\u003c\/div\u003e\n\u003ch3 align=\"center\"\u003eProduct Packaging\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\n\u003cbr\u003e\u003cimg class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-33.jpg\"\u003e \u003cbr\u003e\u003cimg class=\"round1234\" src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-35.jpg\"\u003e\n\u003c\/div\u003e\n\u003ch3 align=\"center\"\u003eDimensions\u003c\/h3\u003e\n\u003cdiv align=\"center\"\u003e\u003cimg src=\"https:\/\/www.waveshare.com\/img\/devkit\/accBoard\/RoArm-M1\/RoArm-M1-details-size.jpg\"\u003e\u003c\/div\u003e\n\u003cp\u003e \u003c\/p\u003e\n\u003ch3\u003e\u003cstrong\u003ePackage Contents:\u003c\/strong\u003e\u003c\/h3\u003e\n\u003cul\u003e\n\u003cli\u003e\n\u003cstrong\u003eWeight: \u003c\/strong\u003e\u003cspan\u003e1.9 kg\u003c\/span\u003e\n\u003c\/li\u003e\n\u003cli\u003eRoArm-M1 and package box x1\u003c\/li\u003e\n\u003cli\u003e12V 5A power supply x1\u003c\/li\u003e\n\u003c\/ul\u003e"}