











Welcome to the discussion thread for IMU Inertial Navigation Module ROS1/ROS2
Feel free to ask questions, share tips or report issues.
Feel free to ask questions, share tips or report issues.
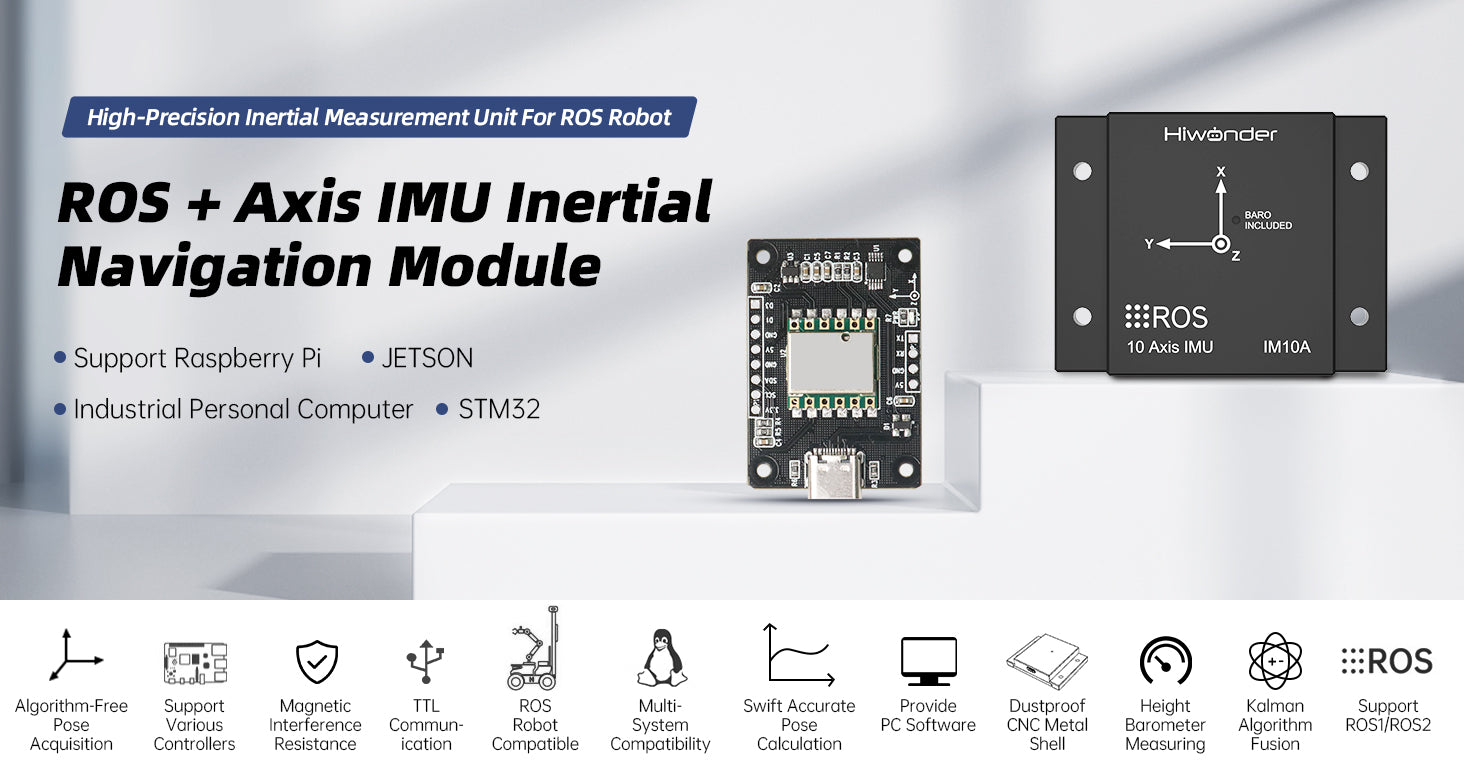
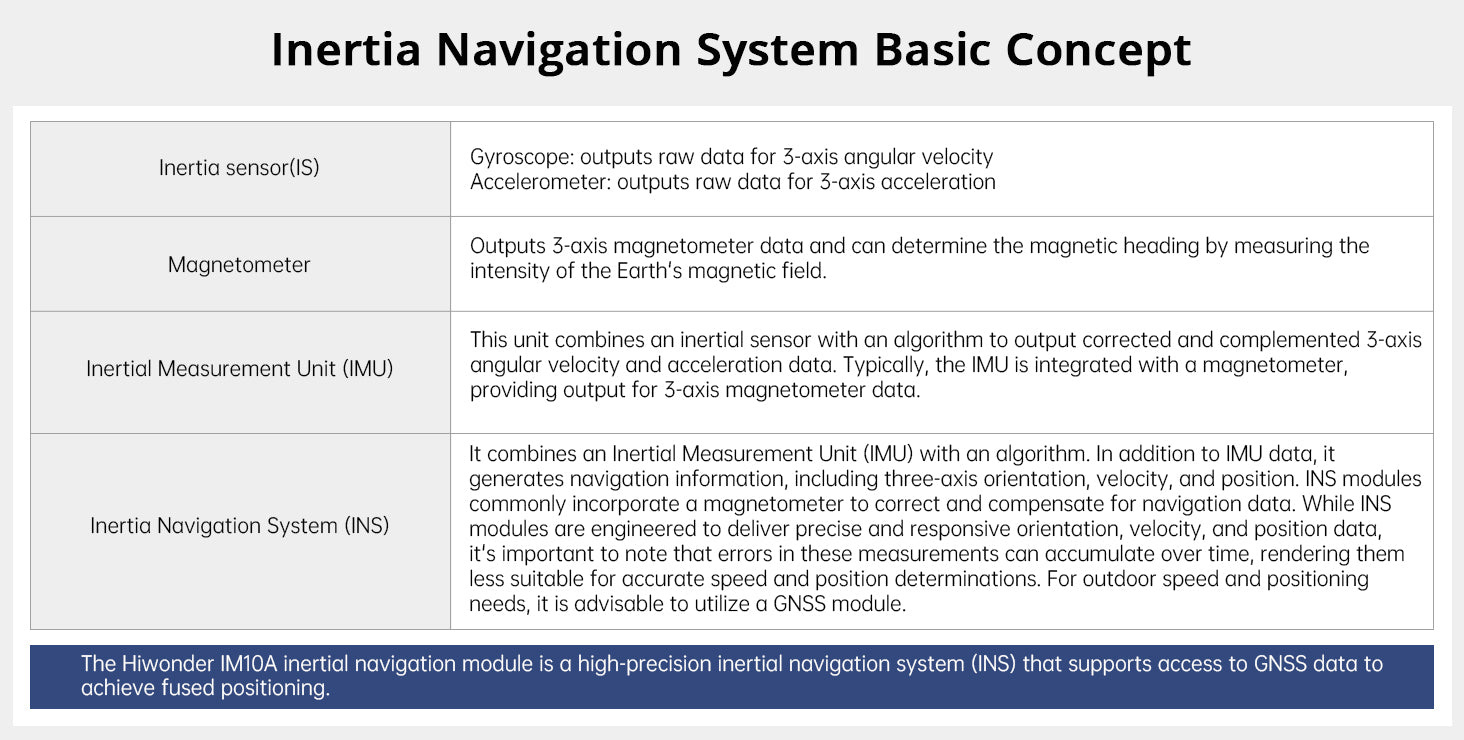
The IM10A inertial navigation module is an advanced three-dimensional motion and posture measurement system utilizing MEMS technology. It comprises a three-axis gyroscope, a three-axis accelerometer, a three-axis magnetometer, and a barometer. With an integrated posture dynamics core algorithm engine and a sophisticated Kalman filter fusion algorithm, the IM10A delivers highly accurate, dynamic, and real-time compensated three-axis posture angle data.
The module supports real-time data transmission at an update rate of up to 200Hz and is compatible with GNSS data for fused positioning. We provide users with PC software, operational instructions, development manuals, and necessary development codes, streamlining the research and development process for users with diverse requirements.

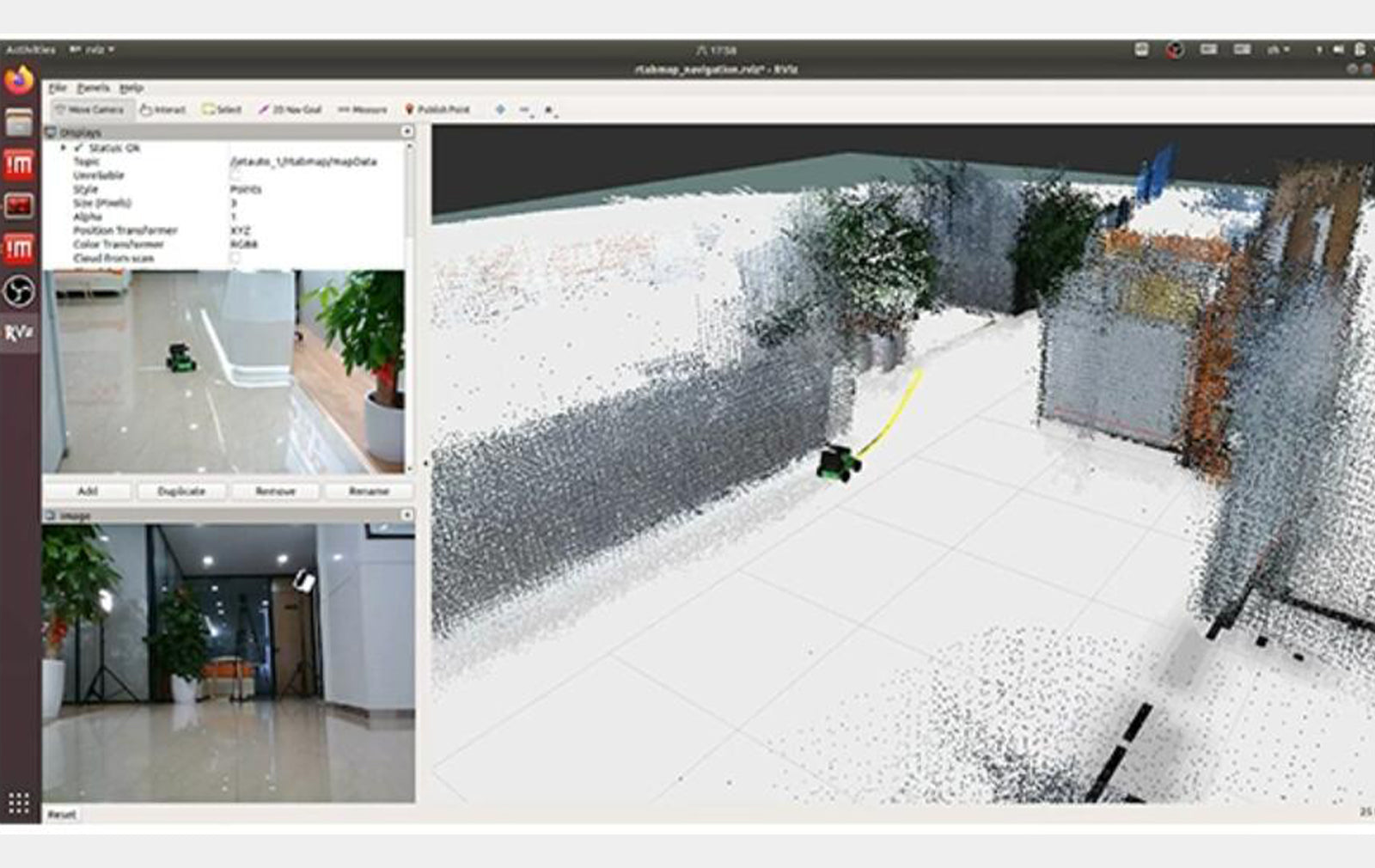
Supports ROS1 and ROS2 SystemsThe IM10A module supports ROS1 and ROS2 systems, and the data output frequency is up to 200Hz. We provide dual system function packages and usage tutorials to facilitate users to get started quickly. |
10-axis Posture SensorThe IM10A inertial navigation module has built-in three-axis gyroscope, three-axis accelerometer, three-axis magnetometer and barometer. |

Built-in Barometer for Altitude MeasurementThe IM10A module has a built-in barometer, which can measure the current altitude, and can also integrate and calculate navigation data to output air pressure data. |
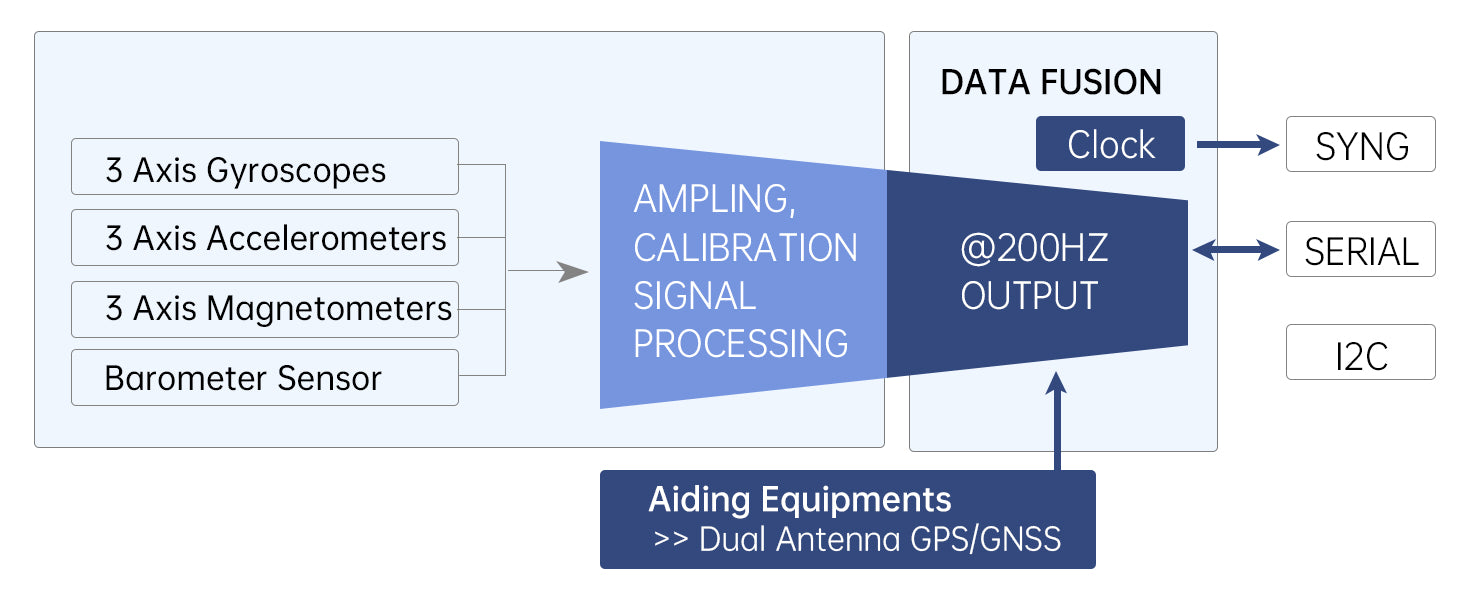

Rich Data OutputThe sensor raw data output frequency is 200Hz: three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer data. Fusion-calculated navigation data output frequency 200Hz: Euler angles, quaternions, air pressure, position (combined with GNSS), speed. |
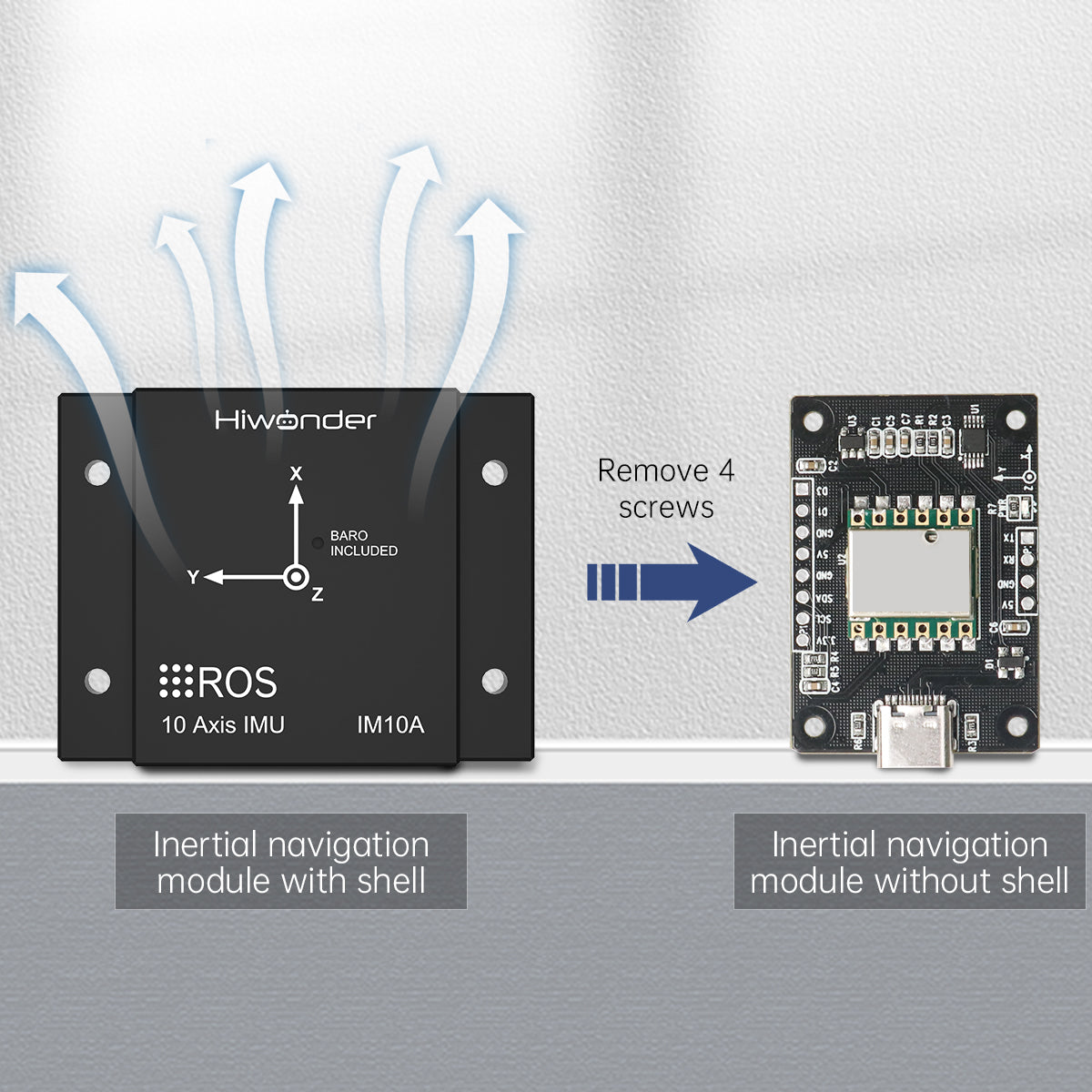
Removable High-precision CNC
|
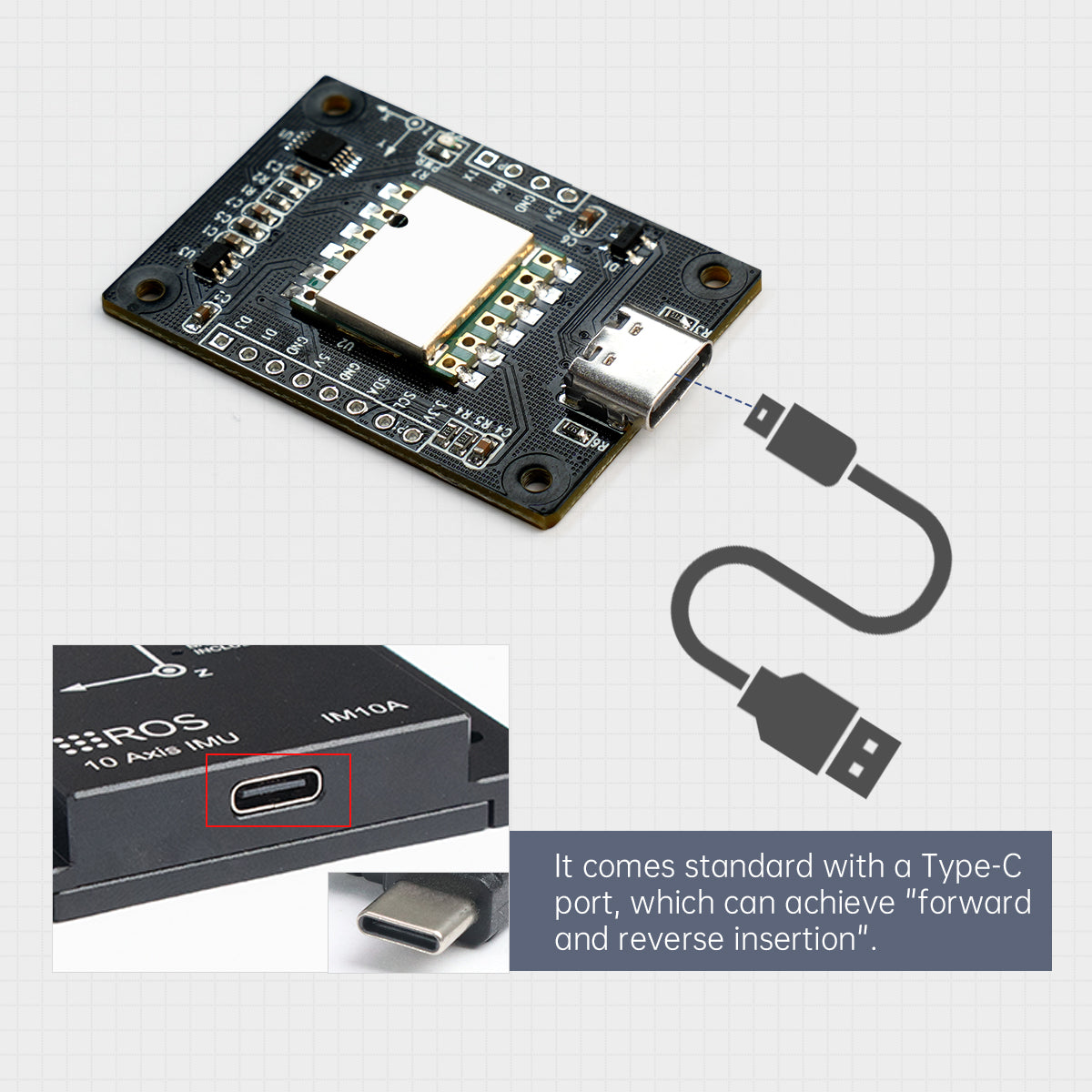
Support Multiple Communication MethodsThe IM10A module supports multiple communication methods such as USB, UART, and I2C, and is equipped with a standard TypeC port. |
 |
Features
|
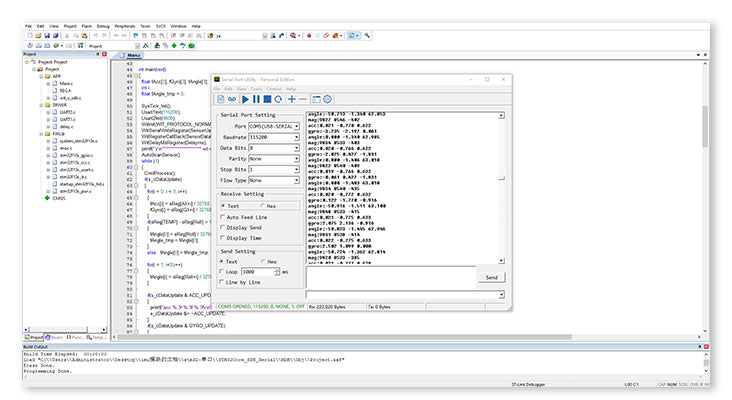
Provide STM32 Calculation RoutinesSupports linking with STM32 solution data and displaying current IMU data and posture angles. |
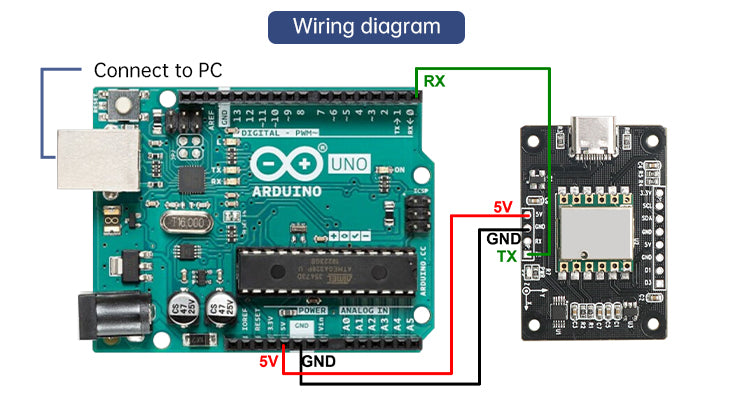
Provide Arduino Calculation RoutinesEnables the output of 9-axis raw data, angular velocity, angles, and other information. The data is directly accessible through the serial port monitor of Arduino IDE and can be utilized with minimal wiring. |
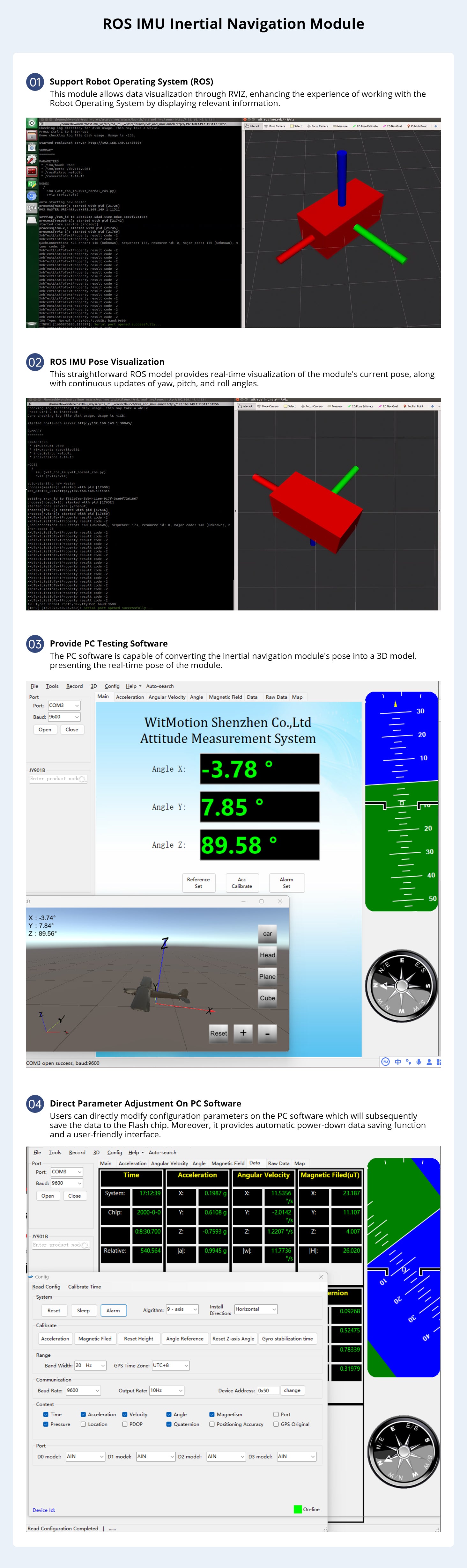
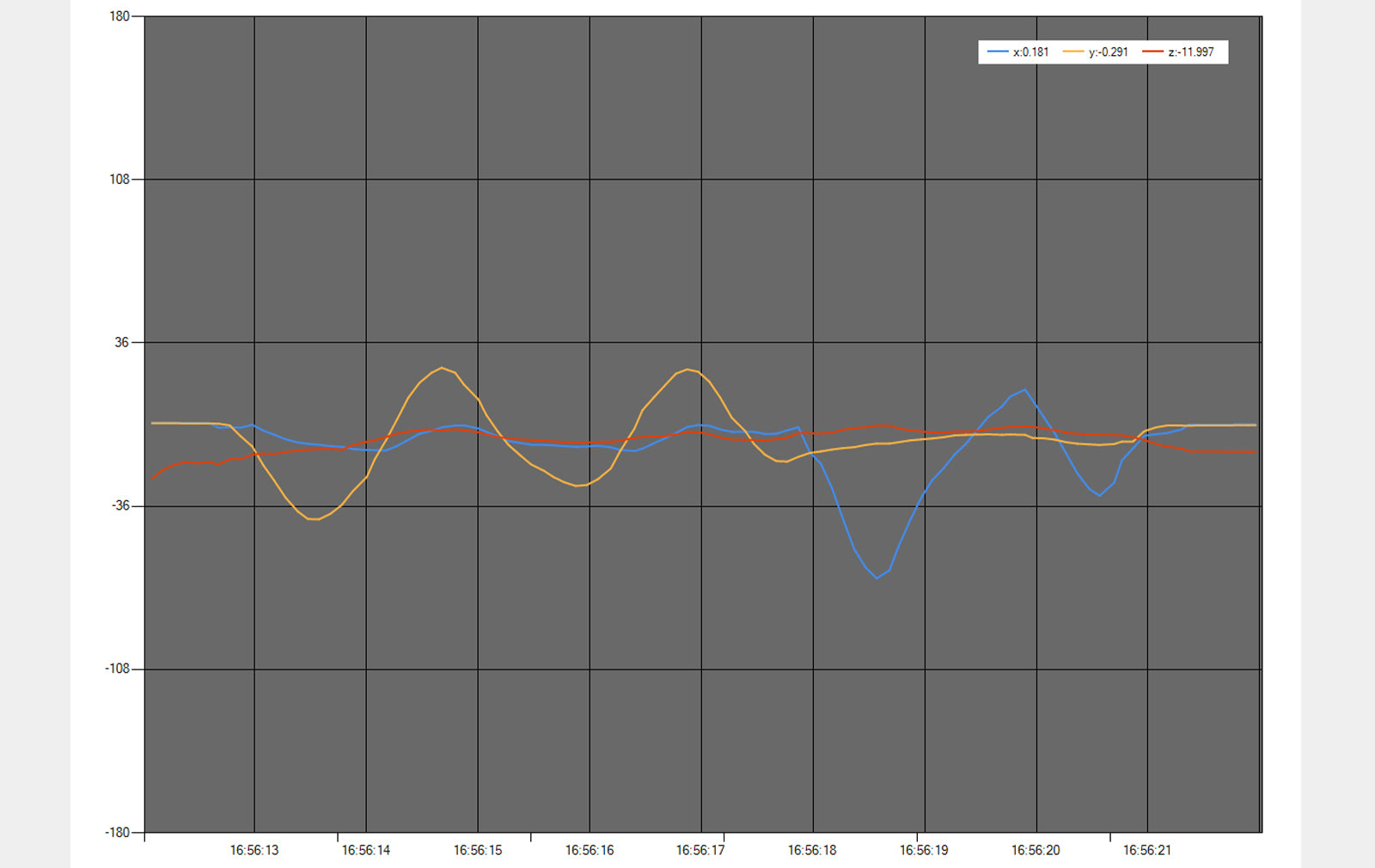
Visualized Data GraphThe module can update data in real-time, display it graphically, and record the information. |
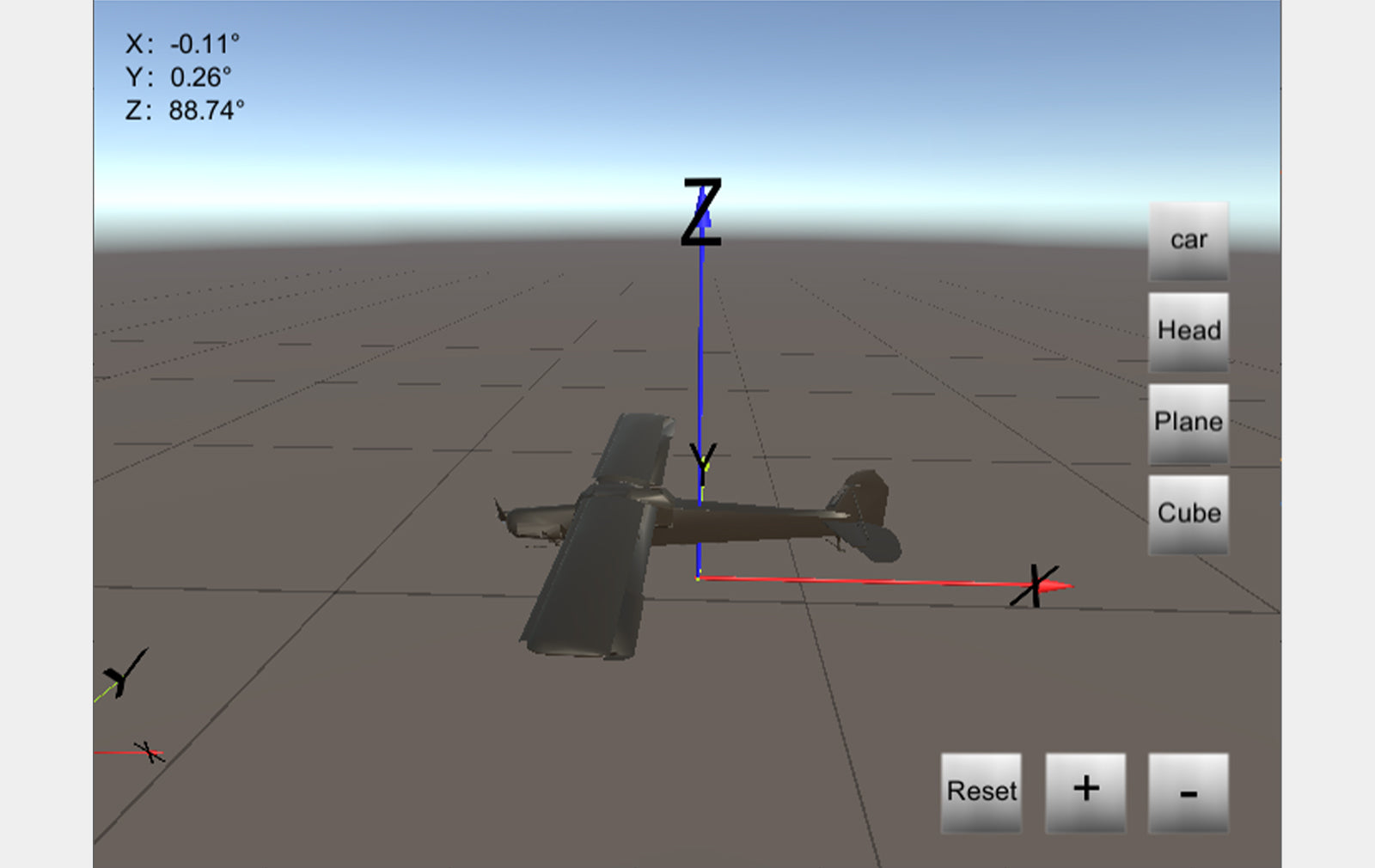
3D Model DisplayThe module can represent its current pose using a 3D model. |
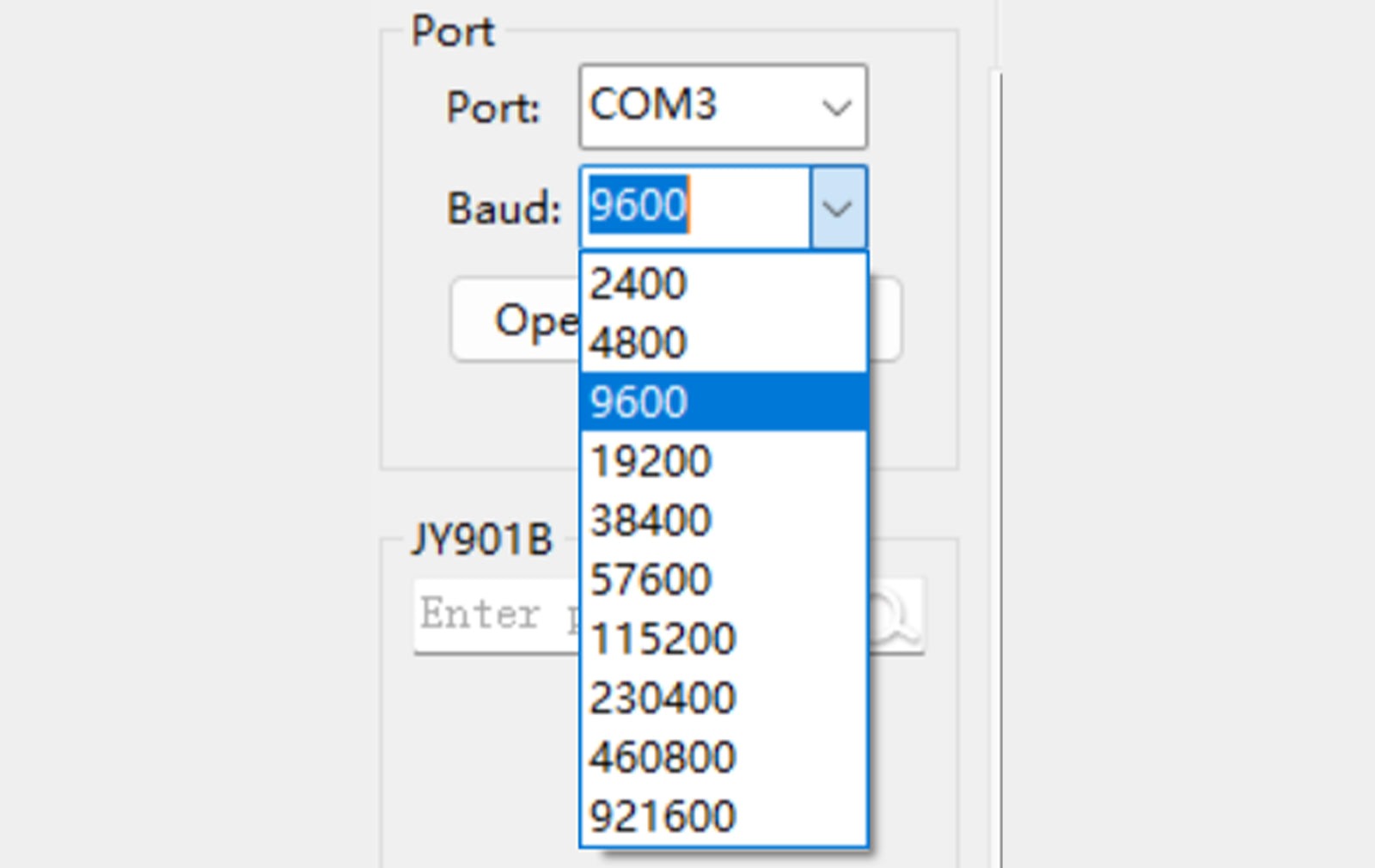
Adjustable Baud RateThe initial baud rate is set at 9600 bps, but it can be adjusted to alternative values such as 115200 bps, 921600 bps, or other custom rates. |
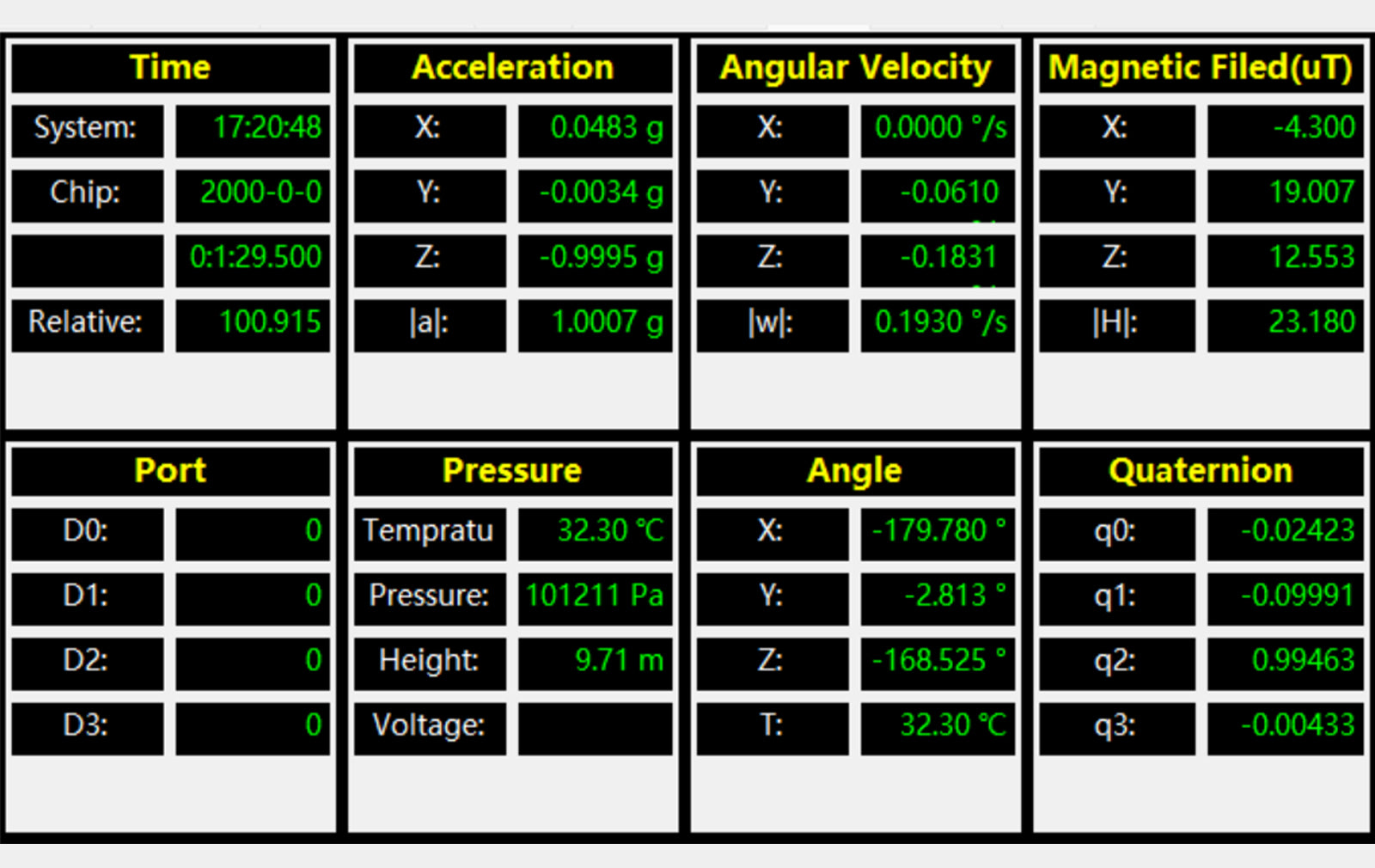
High-Precision Inertia Measuring UnitIt can provide consistent data on gyroscope, accelerometer, magnetometer, Euler angles, quaternion, and other information. |
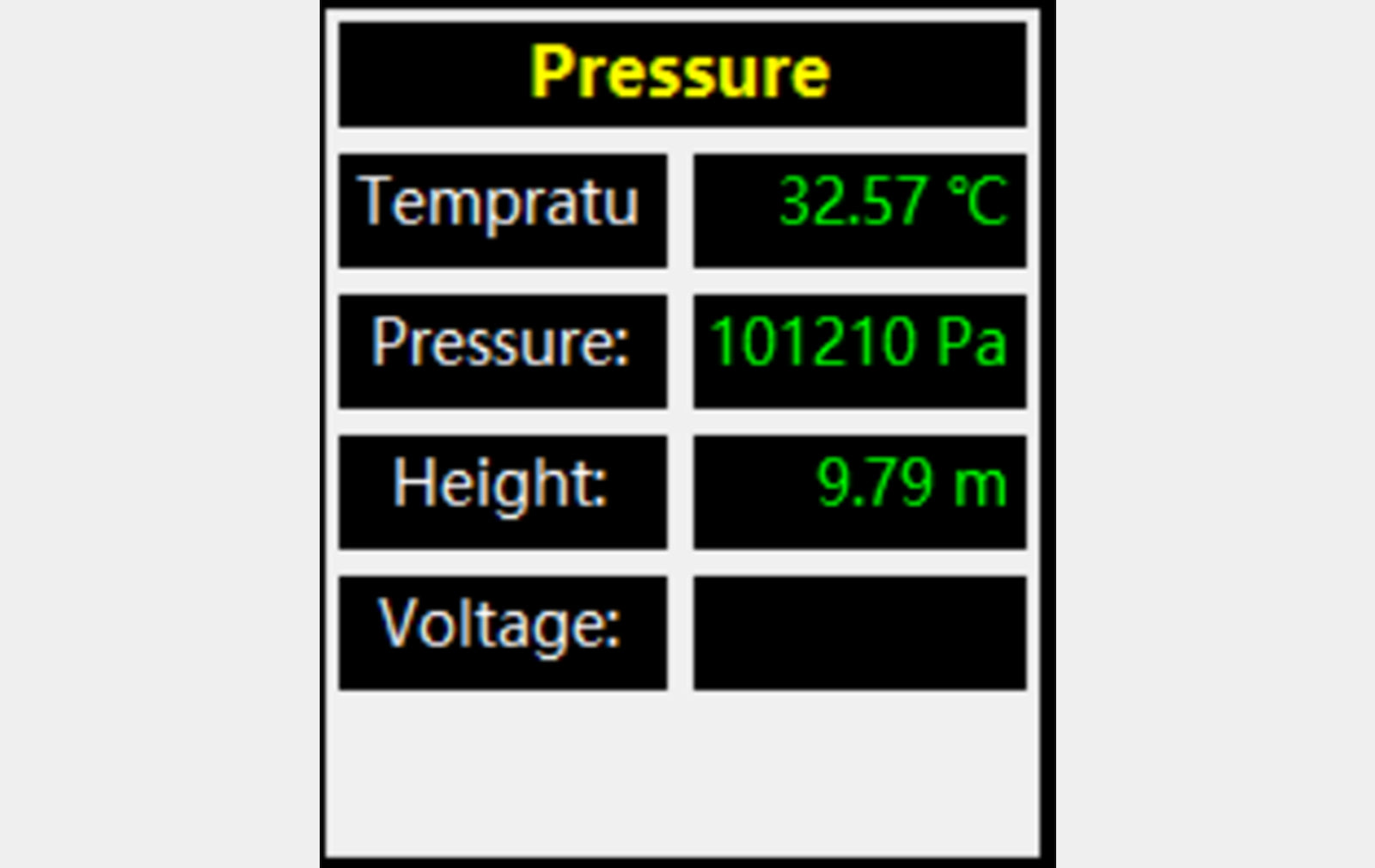
Barometer for Pressure and Height ReadingThe module includes an integrated barometer capable of measuring both atmospheric pressure and height. |
Responsive MeasurementIt can provide sensitive response, stable operation and accurate measurements. |
| Parameter | Note | Parameter | Note |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. | Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit | I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Output speed | 10Hz by default. It can set to 0.2-200Hz | Working voltage | 5V or 3.3V |
| Operating temperature | -40-85℃ | Working current | 12mA |
| Storage temperature | -40-100℃ | Start-up duration | 1000ms |
| Shock resistance | 20kg | Support | ROS1/ ROS2 |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more | PC software compatible system | Windows |
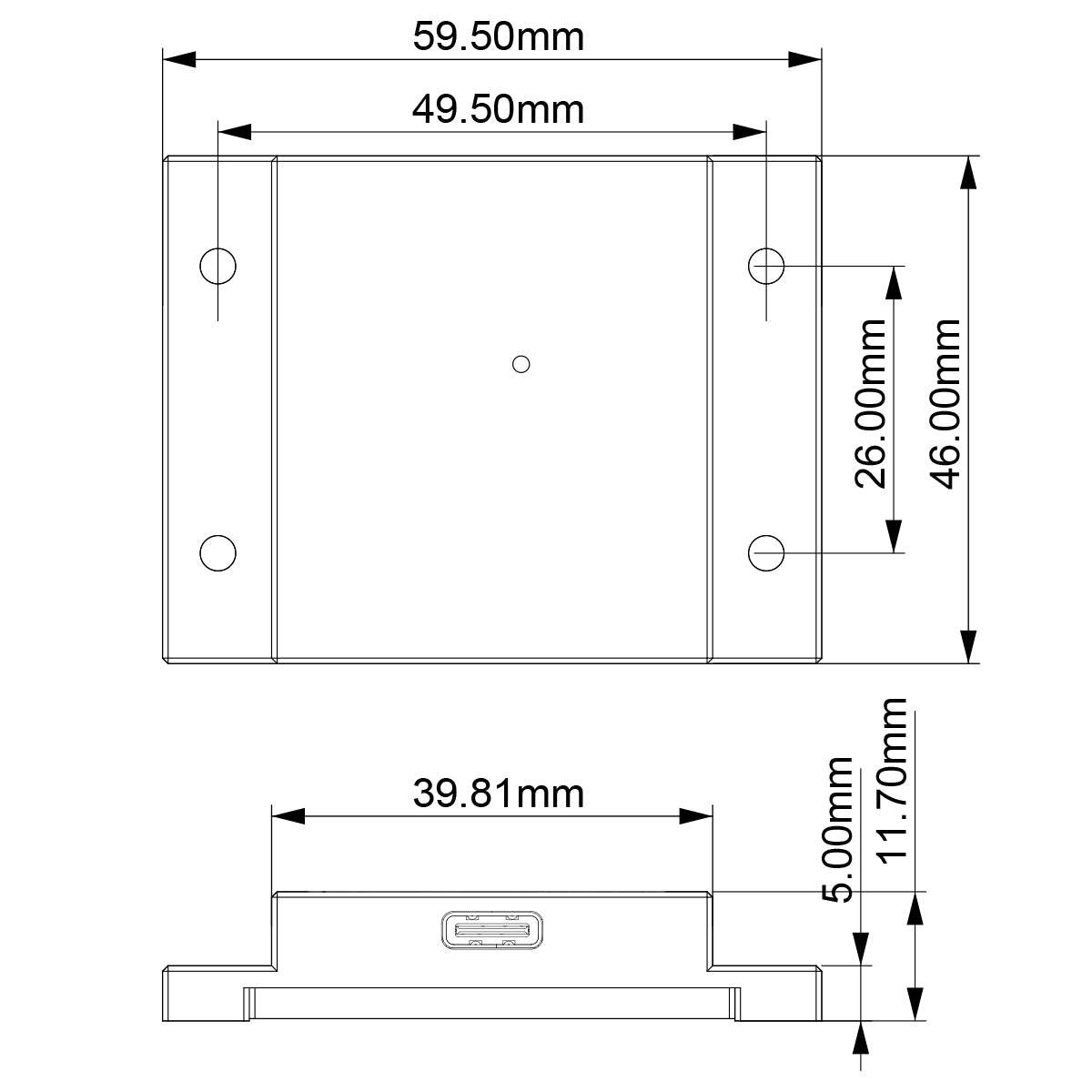
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm | Weight | Without shell: 5.7g; With shell: 50g |
| Parameter | Condition | Classic value |
| Range | - | ±16g |
| Resolution | ±16g | 0.0005(g/LSB) |
| RMS noise | bandwidth=100Hz | 0.75-1mg-rms |
| Zero drift | Placed horizontally | ±20-40mg |
| Temperature drift | -40~+85℃ | ±0.15mg/℃ |
| Bandwidth | - | 5-256Hz |
| Parameter | Condition | Classic value |
| Range | - | ±2000°/s |
| Resolution | ±2000°/s | 0.061(°/s)/(LSB) |
| RMS noise | bandwidth=100Hz | 0.028-0.07(°/s)-rms |
| Zero drift | Placed horizontally | ±0.5-1°/s |
| Temperature drift | -40~+85℃ | ±0.005~0.015(°/s)/℃ |
| Bandwidth | - | 5-256Hz |
| Parameter | Condition | Classic value |
| Range | - | ±2Gauss |
| Resolution | ±2Gauss | 0.0667mGauss/LSB |
| Parameter | Condition | Classic value |
| Range | - | 300-1100hPa |
| RMS noise | Standard mode | 0.5Pa-RMS |
| Relative accuracy | - | ±0.06hPa |
| Parameter | Condition | Classic value |
| Range | - | x: ±180°; y: ±90° |
| Tilt accuracy | Static | 0.1° |
| Tilt accuracy | Dynamic | 0.5° |
| Resolution | Placed horizontally | 0.0055° |
| Temperature drift | -40~+85℃ | ±0.5~1°/s |
| Parameter | Condition | Classic value |
| Range | - | Z: ±180° |
| Yaw accuracy | 9-axis algorithm, magnetic field calibration, dynamic/ static | 0.1° (free from magnetic interference) |
| Yaw accuracy | 6-axis algorithm, static | 0.5° (dynamic accumulation of integral errors) |
| Resolution | Placed horizontally | 0.0055° |



| Item | Specification |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit |
| Output speed | 10Hz by default. It can set to 0.2-200Hz |
| Operating temperature | -40-85℃ |
| Storage temperature | -40-100℃ |
| Shock resistance | 20kg |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm |
| Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Working voltage | 5V or 3.3V |
| Working current | 12mA |
| Start-up duration | 1000ms |
| Support | ROS1/ ROS2 |
| PC software compatible system | Windows |
| Weight | Without shell: 5.7g; With shell: 50g |
No reviews yet. Be the first to share your experience!
Discover More In:
Category: View similar items (IMU)




Fill out the form below and our team will get back to you with bulk pricing.
The IM10A inertial navigation module is an advanced three-dimensional motion and posture measurement system utilizing MEMS technology. It comprises a three-axis gyroscope, a three-axis accelerometer, a three-axis magnetometer, and a barometer. With an integrated posture dynamics core algorithm engine and a sophisticated Kalman filter fusion algorithm, the IM10A delivers highly accurate, dynamic, and real-time compensated three-axis posture angle data.
The module supports real-time data transmission at an update rate of up to 200Hz and is compatible with GNSS data for fused positioning. We provide users with PC software, operational instructions, development manuals, and necessary development codes, streamlining the research and development process for users with diverse requirements.
Supports ROS1 and ROS2 SystemsThe IM10A module supports ROS1 and ROS2 systems, and the data output frequency is up to 200Hz. We provide dual system function packages and usage tutorials to facilitate users to get started quickly. |
10-axis Posture SensorThe IM10A inertial navigation module has built-in three-axis gyroscope, three-axis accelerometer, three-axis magnetometer and barometer. |
Built-in Barometer for Altitude MeasurementThe IM10A module has a built-in barometer, which can measure the current altitude, and can also integrate and calculate navigation data to output air pressure data. |
Rich Data OutputThe sensor raw data output frequency is 200Hz: three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer data. Fusion-calculated navigation data output frequency 200Hz: Euler angles, quaternions, air pressure, position (combined with GNSS), speed. |
Removable High-precision CNC
|
Support Multiple Communication MethodsThe IM10A module supports multiple communication methods such as USB, UART, and I2C, and is equipped with a standard TypeC port. |
|
Features
|
Provide STM32 Calculation RoutinesSupports linking with STM32 solution data and displaying current IMU data and posture angles. |
Provide Arduino Calculation RoutinesEnables the output of 9-axis raw data, angular velocity, angles, and other information. The data is directly accessible through the serial port monitor of Arduino IDE and can be utilized with minimal wiring. |
Visualized Data GraphThe module can update data in real-time, display it graphically, and record the information. |
3D Model DisplayThe module can represent its current pose using a 3D model. |
Adjustable Baud RateThe initial baud rate is set at 9600 bps, but it can be adjusted to alternative values such as 115200 bps, 921600 bps, or other custom rates. |
High-Precision Inertia Measuring UnitIt can provide consistent data on gyroscope, accelerometer, magnetometer, Euler angles, quaternion, and other information. |
Barometer for Pressure and Height ReadingThe module includes an integrated barometer capable of measuring both atmospheric pressure and height. |
Responsive MeasurementIt can provide sensitive response, stable operation and accurate measurements. |
| Parameter | Note | Parameter | Note |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. | Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit | I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Output speed | 10Hz by default. It can set to 0.2-200Hz | Working voltage | 5V or 3.3V |
| Operating temperature | -40-85℃ | Working current | 12mA |
| Storage temperature | -40-100℃ | Start-up duration | 1000ms |
| Shock resistance | 20kg | Support | ROS1/ ROS2 |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more | PC software compatible system | Windows |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm | Weight | Without shell: 5.7g; With shell: 50g |
| Parameter | Condition | Classic value |
| Range | - | ±16g |
| Resolution | ±16g | 0.0005(g/LSB) |
| RMS noise | bandwidth=100Hz | 0.75-1mg-rms |
| Zero drift | Placed horizontally | ±20-40mg |
| Temperature drift | -40~+85℃ | ±0.15mg/℃ |
| Bandwidth | - | 5-256Hz |
| Parameter | Condition | Classic value |
| Range | - | ±2000°/s |
| Resolution | ±2000°/s | 0.061(°/s)/(LSB) |
| RMS noise | bandwidth=100Hz | 0.028-0.07(°/s)-rms |
| Zero drift | Placed horizontally | ±0.5-1°/s |
| Temperature drift | -40~+85℃ | ±0.005~0.015(°/s)/℃ |
| Bandwidth | - | 5-256Hz |
| Parameter | Condition | Classic value |
| Range | - | ±2Gauss |
| Resolution | ±2Gauss | 0.0667mGauss/LSB |
| Parameter | Condition | Classic value |
| Range | - | 300-1100hPa |
| RMS noise | Standard mode | 0.5Pa-RMS |
| Relative accuracy | - | ±0.06hPa |
| Parameter | Condition | Classic value |
| Range | - | x: ±180°; y: ±90° |
| Tilt accuracy | Static | 0.1° |
| Tilt accuracy | Dynamic | 0.5° |
| Resolution | Placed horizontally | 0.0055° |
| Temperature drift | -40~+85℃ | ±0.5~1°/s |
| Parameter | Condition | Classic value |
| Range | - | Z: ±180° |
| Yaw accuracy | 9-axis algorithm, magnetic field calibration, dynamic/ static | 0.1° (free from magnetic interference) |
| Yaw accuracy | 6-axis algorithm, static | 0.5° (dynamic accumulation of integral errors) |
| Resolution | Placed horizontally | 0.0055° |
| Item | Specification |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit |
| Output speed | 10Hz by default. It can set to 0.2-200Hz |
| Operating temperature | -40-85℃ |
| Storage temperature | -40-100℃ |
| Shock resistance | 20kg |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm |
| Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Working voltage | 5V or 3.3V |
| Working current | 12mA |
| Start-up duration | 1000ms |
| Support | ROS1/ ROS2 |
| PC software compatible system | Windows |
| Weight | Without shell: 5.7g; With shell: 50g |
No reviews yet. Be the first to share your experience!
Discover More In:
Category: View similar items (IMU)
Fill out the form below and our team will get back to you with bulk pricing.
Custom Requirements?
Related products



