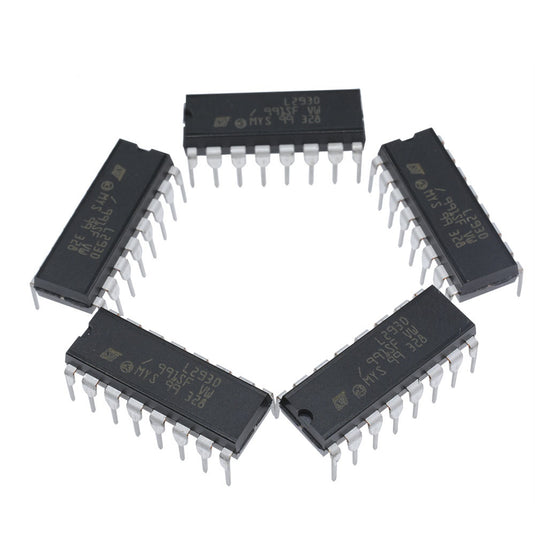
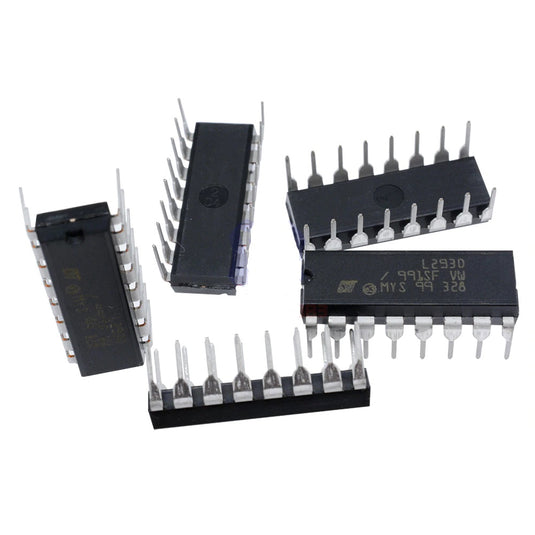
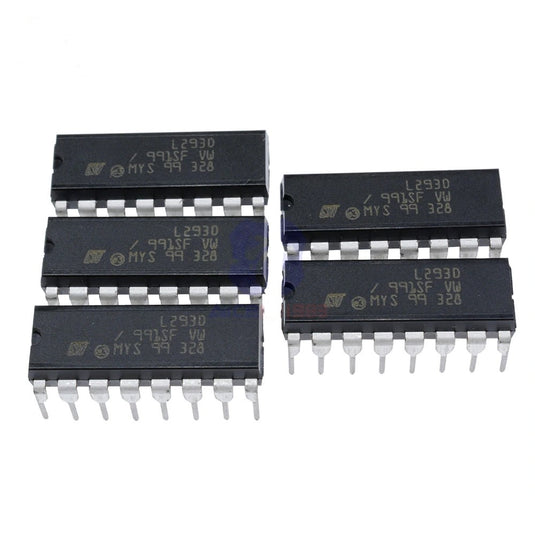
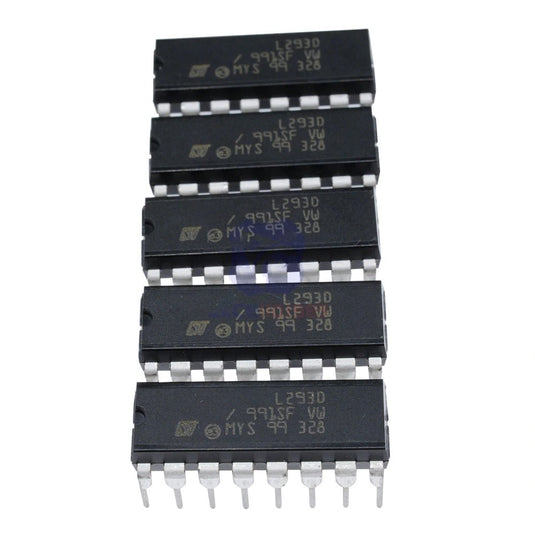
L293D is a dual H-bridge motor driver integrated circuit (IC). Motor drivers act as current amplifiers since they take a low-current control signal and provide a higher-current signal. This higher current signal is used to drive the motors. L293D contains two inbuilt H-bridge driver circuits. In its common mode of operation, two DC motors can be driven simultaneously, both in forward and reverse direction. The motor operations of two motors can be controlled by input logic at pins 2 & 7 and 10 & 15. Input logic 00 or 11 will stop the corresponding motor. Logic 01 and 10 will rotate it in clockwise and anticlockwise directions, respectively.
Enable pins 1 and 9 (corresponding to the two motors) must be high for motors to start operating. When an enable input is high, the associated driver gets enabled. As a result, the outputs become active and work in phase with their inputs. Similarly, when the enable input is low, that driver is disabled, and their outputs are off and in the high-impedance state.
Use left/right arrows to navigate the slideshow or swipe left/right if using a mobile device
Choosing a selection results in a full page refresh.
Press the space key then arrow keys to make a selection.
Shopping Cart
{"id":1651084886088,"title":"L293D IC Motor Driver","handle":"l293d-ic-motor-driver-datasheet","description":"\u003cp\u003e\u003cspan\u003eL293D is a dual H-bridge motor driver integrated circuit (IC). Motor drivers act as current amplifiers since they take a low-current control signal and provide a higher-current signal. This higher current signal is used to drive the motors. \u003c\/span\u003e\u003cspan\u003eL293D contains two inbuilt H-bridge driver circuits. In its common mode of operation, two DC motors can be driven simultaneously, both in forward and reverse direction. The motor operations of two motors can be controlled by input logic at pins 2 \u0026amp; 7 and 10 \u0026amp; 15. Input logic 00 or 11 will stop the corresponding motor. Logic 01 and 10 will rotate it in clockwise and anticlockwise directions, respectively.\u003c\/span\u003e\u003c\/p\u003e\n\u003cp\u003e\u003cbr\u003e\u003cspan\u003eEnable pins 1 and 9 (corresponding to the two motors) must be high for motors to start operating. When an enable input is high, the associated driver gets enabled. As a result, the outputs become active and work in phase with their inputs. Similarly, when the enable input is low, that driver is disabled, and their outputs are off and in the high-impedance state.\u003c\/span\u003e\u003c\/p\u003e\n\u003ch5\u003e\u003cspan\u003eSpecifications\u003c\/span\u003e\u003c\/h5\u003e\n\u003cp\u003e\u003cspan\u003e\u003cimg src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/L293D-PowerDIP-16-Stepper-Motor-Controller-Driver-1_480x480.jpg?v=1593208673\" alt=\"\"\u003e\u003c\/span\u003e\u003c\/p\u003e\n\u003cp\u003e\u003cspan\u003e\u003cimg src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/F8ATQS4J3NR0XUJ.LARGE_480x480.jpg?v=1593208677\" alt=\"\"\u003e\u003c\/span\u003e\u003c\/p\u003e\n\u003ch5\u003e\u003cspan\u003eResources\u003c\/span\u003e\u003c\/h5\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/DATASHEET\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC4012\"\u003e\u003cspan\u003eDatasheet\u003c\/span\u003e\u003c\/a\u003e\u003c\/p\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/LIBRARIES\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC4012\"\u003e\u003cspan\u003eLibrary\u003c\/span\u003e\u003c\/a\u003e\u003c\/p\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/LIBRARIES\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC4012\"\u003e\u003cspan\u003eSample Code\u003c\/span\u003e\u003c\/a\u003e\u003c\/p\u003e\n\u003ch5\u003e\u003cspan\u003eTutorial\u003c\/span\u003e\u003c\/h5\u003e\n\u003ciframe width=\"560\" height=\"315\" src=\"https:\/\/www.youtube.com\/embed\/d7oFD-zQpuQ\" frameborder=\"0\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" allowfullscreen=\"\"\u003e\u003c\/iframe\u003e \u003ciframe width=\"560\" height=\"315\" src=\"https:\/\/www.youtube.com\/embed\/zhWGeJnIfeY\" frameborder=\"0\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" allowfullscreen=\"\"\u003e\u003c\/iframe\u003e","published_at":"2022-12-06T11:22:54+05:30","created_at":"2019-03-04T10:11:58+05:30","vendor":"ThinkRobotics","type":"Motor Drivers","tags":["CMPNT","CS20","driver","ELC4","L293D","Motor","motor drivers","MTR-DRV","ZOHO UPDATED"],"price":3499,"price_min":3499,"price_max":3499,"available":true,"price_varies":false,"compare_at_price":4000,"compare_at_price_min":4000,"compare_at_price_max":4000,"compare_at_price_varies":false,"variants":[{"id":16232120778824,"title":"Default Title","option1":"Default Title","option2":null,"option3":null,"sku":"ELC4012","requires_shipping":true,"taxable":true,"featured_image":null,"available":true,"name":"L293D IC Motor Driver","public_title":null,"options":["Default Title"],"price":3499,"weight":10,"compare_at_price":4000,"inventory_management":"shopify","barcode":"ELC4012","requires_selling_plan":false,"selling_plan_allocations":[],"quantity_rule":{"min":1,"max":null,"increment":1}}],"images":["\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1FJC2azzuK1RjSspeq6ziHVXa9_LI.jpg?v=1577794108","\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1QkOYasfrK1Rjy0Fmq6xhEXXal_LI.jpg?v=1577794108","\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1P.CTau6sK1xbDXXak_LI.jpg?v=1577794108","\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1X5C2asfrK1RkSnb4q6xHRFXaF_LI.jpg?v=1577794108"],"featured_image":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1FJC2azzuK1RjSspeq6ziHVXa9_LI.jpg?v=1577794108","options":["Title"],"media":[{"alt":"L293D IC Motor Driver","id":866305769544,"position":1,"preview_image":{"aspect_ratio":1.0,"height":1000,"width":1000,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1FJC2azzuK1RjSspeq6ziHVXa9_LI.jpg?v=1577794108"},"aspect_ratio":1.0,"height":1000,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1FJC2azzuK1RjSspeq6ziHVXa9_LI.jpg?v=1577794108","width":1000},{"alt":"L293D IC Motor Driver","id":866306097224,"position":2,"preview_image":{"aspect_ratio":1.0,"height":1000,"width":1000,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1QkOYasfrK1Rjy0Fmq6xhEXXal_LI.jpg?v=1577794108"},"aspect_ratio":1.0,"height":1000,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1QkOYasfrK1Rjy0Fmq6xhEXXal_LI.jpg?v=1577794108","width":1000},{"alt":"L293D IC Motor Driver","id":866306162760,"position":3,"preview_image":{"aspect_ratio":1.0,"height":1000,"width":1000,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1P.CTau6sK1xbDXXak_LI.jpg?v=1577794108"},"aspect_ratio":1.0,"height":1000,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1P.CTau6sK1xbDXXak_LI.jpg?v=1577794108","width":1000},{"alt":"L293D IC Motor Driver","id":866306195528,"position":4,"preview_image":{"aspect_ratio":1.0,"height":1000,"width":1000,"src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1X5C2asfrK1RkSnb4q6xHRFXaF_LI.jpg?v=1577794108"},"aspect_ratio":1.0,"height":1000,"media_type":"image","src":"\/\/thinkrobotics.com\/cdn\/shop\/products\/InkedHTB1X5C2asfrK1RkSnb4q6xHRFXaF_LI.jpg?v=1577794108","width":1000}],"requires_selling_plan":false,"selling_plan_groups":[],"content":"\u003cp\u003e\u003cspan\u003eL293D is a dual H-bridge motor driver integrated circuit (IC). Motor drivers act as current amplifiers since they take a low-current control signal and provide a higher-current signal. This higher current signal is used to drive the motors. \u003c\/span\u003e\u003cspan\u003eL293D contains two inbuilt H-bridge driver circuits. In its common mode of operation, two DC motors can be driven simultaneously, both in forward and reverse direction. The motor operations of two motors can be controlled by input logic at pins 2 \u0026amp; 7 and 10 \u0026amp; 15. Input logic 00 or 11 will stop the corresponding motor. Logic 01 and 10 will rotate it in clockwise and anticlockwise directions, respectively.\u003c\/span\u003e\u003c\/p\u003e\n\u003cp\u003e\u003cbr\u003e\u003cspan\u003eEnable pins 1 and 9 (corresponding to the two motors) must be high for motors to start operating. When an enable input is high, the associated driver gets enabled. As a result, the outputs become active and work in phase with their inputs. Similarly, when the enable input is low, that driver is disabled, and their outputs are off and in the high-impedance state.\u003c\/span\u003e\u003c\/p\u003e\n\u003ch5\u003e\u003cspan\u003eSpecifications\u003c\/span\u003e\u003c\/h5\u003e\n\u003cp\u003e\u003cspan\u003e\u003cimg src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/L293D-PowerDIP-16-Stepper-Motor-Controller-Driver-1_480x480.jpg?v=1593208673\" alt=\"\"\u003e\u003c\/span\u003e\u003c\/p\u003e\n\u003cp\u003e\u003cspan\u003e\u003cimg src=\"https:\/\/cdn.shopify.com\/s\/files\/1\/0014\/4313\/5560\/files\/F8ATQS4J3NR0XUJ.LARGE_480x480.jpg?v=1593208677\" alt=\"\"\u003e\u003c\/span\u003e\u003c\/p\u003e\n\u003ch5\u003e\u003cspan\u003eResources\u003c\/span\u003e\u003c\/h5\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/DATASHEET\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC4012\"\u003e\u003cspan\u003eDatasheet\u003c\/span\u003e\u003c\/a\u003e\u003c\/p\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/LIBRARIES\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC4012\"\u003e\u003cspan\u003eLibrary\u003c\/span\u003e\u003c\/a\u003e\u003c\/p\u003e\n\u003cp\u003e\u003ca href=\"https:\/\/github.com\/thinkrobotics\/LIBRARIES\/tree\/master\/ELECTRONIC_COMPONENTS\/ELC4012\"\u003e\u003cspan\u003eSample Code\u003c\/span\u003e\u003c\/a\u003e\u003c\/p\u003e\n\u003ch5\u003e\u003cspan\u003eTutorial\u003c\/span\u003e\u003c\/h5\u003e\n\u003ciframe width=\"560\" height=\"315\" src=\"https:\/\/www.youtube.com\/embed\/d7oFD-zQpuQ\" frameborder=\"0\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" allowfullscreen=\"\"\u003e\u003c\/iframe\u003e \u003ciframe width=\"560\" height=\"315\" src=\"https:\/\/www.youtube.com\/embed\/zhWGeJnIfeY\" frameborder=\"0\" allow=\"accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture\" allowfullscreen=\"\"\u003e\u003c\/iframe\u003e"}
3D printed parts are of low finish. Lot.of sharp edges on parts. Also the fitment of the parts are not happening because of excess material. Most often the parts have to be filed or reworked. Screws are given in exact number as needed. If one screw is missed, then the assembly is impossible
The consignment was not dispatched as per committed date and had to pursue for dispatch information. The courier didn,t deliver us despit lying in Jaipur and we had to personally collect it from Courier Hub adding to inconvenience. The logistics need to be improved. Just a feedback.