















xArm ESP32 Bus Servo Robotic Arm
The xArm-ESP32 is an open-source desktop robot arm featuring an ESP32 controller as its main control system. Programmed with MicroPython, it boasts Wi-Fi and Bluetooth wireless communication capabilities. Beyond traditional desktop robot arm controls, it offers an expansion interface compatible with sensor expansion packages and our Python editor software, facilitating the development of diverse creative projects efficiently.

Powered by ESP32 Controller - The xArm-ESP32 open-source desktop robotic arm uses the ESP32 open-source controller as the main control system and adopts Micro-Python programming. The robotic arm has an expansion interface, and with the sensor expansion package, it can realize intelligent grasping, color sorting and other gameplay.
Supports Multiple Control Methods - The xArm-ESP32 supports three action editing methods: via host computer and mobile phone app, as well as PS2 handle, synchronous teaching device, and other six control methods. Additionally, these robotic arms can be wirelessly controlled via Bluetooth, offering ease of operation and endless enjoyment.
Inverse Kinematics Algorithm - We have provided a comprehensive analysis of the xArm ESP32 inverse kinematics, enabling you to thoroughly understand the operational logic of the robot arm.
Intelligent Bus Servo, Powerful Power Core - The xArm-ESP32 employs intelligent serial bus servos that offer high accuracy and precise data feedback. Its wiring is simplified to reduce friction between the wires and brackets. The base servo has been upgraded to one with a torque of 25KG, enabling the robot arm to lift objects weighing up to 500g while maintaining smooth motion.

ESP32 Open-Source Controller - The open-source ESP32 controller employs a modular design and integrates an ESP32 core board. It has multiple built-in interfaces and supports MicroPython programming.
High Torque Intelligent Bus Servo - The LX-225 intelligent bus servo has a torque of 25KG, and its powerful power enables the robotic arm to grab heavier objects.
Inverse Kinematics Algorithm - We have provided a comprehensive analysis of the xArm ESP32 inverse kinematics, enabling you to thoroughly understand the operational logic of the robot arm.
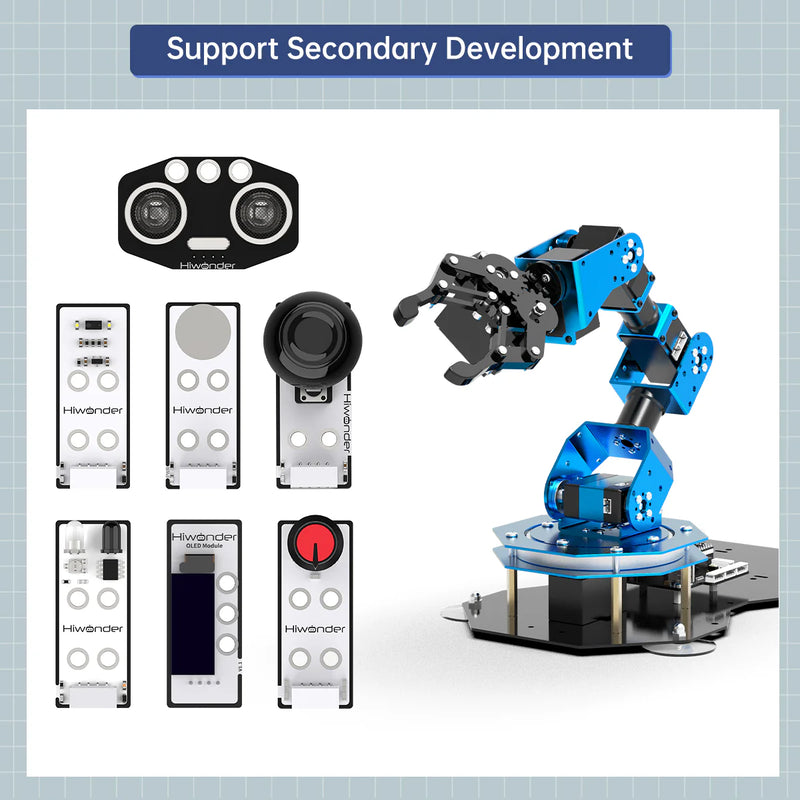
Support Secondary Development - The xArm ESP32 robot arm supports secondary development and comes with a sensor expansion package. It can have a diverse range of creative applications and games.
Intelligent Creative Functions
Sonic Distance Ranging and Gripping

Color Recognition and Gripping

Infrared-Based Gripping

Touch-Based Gripping

Gripping Controlled by Joystick

Motion Control via Knob


App Action Editing
The xArm ESP32 robot arm includes an app with a user-friendly interface. Users can easily add actions by directly adjusting servo rotation angles within the app or manually dragging the robot arm to achieve the desired positions. Additionally, they can modify the duration of action sequences, save new actions, and manage existing action groups with ease.

Action Editing with the Synchronization Controller
The synchronization controller incorporates a 'learning' button and a 'one-click run' button. Pressing the 'learning' button allows you to initiate action learning using the controller. Once a set of actions has been learned, simply press the 'one-click run' button on the synchronization controller to activate the robot arm and execute the learned action group seamlessly.

Support Multiple Control Methods

APP Control - The xArm ESP32 supports app control. The dedicated app features a user-friendly 2D visual interface, allowing you to control the robot arm effortlessly by dragging the model and pressing buttons.
Synchronization Controller Control - The synchronization controller enables wireless robot control through Bluetooth, ensuring the seamless coordination of the robot's actions with the controller.
Bluetooth Group Control - Users can effortlessly coordinate group control among multiple xArm ESP32 robot arms, offering an engaging and intuitive experience.
Mouse/ Handle/ Wireless Glove Control - xArm-ESP32 supports mouse/ handle/ motion glove control, which is easy to operate and allows you to experience the fun of casual control.
ESP32 Main Control System
The open-source ESP32 controller embraces a straight forward modular design, comprising an ESP32 core board and a versatile expansion board. In addition to onboard servo ports, the controller features a buzzer, LED, USB port, and other electronic components. It offers diverse expansion interfaces to support sensor and module expansions. The ESP32 core board includes Wi-Fi and Bluetooth functions, enabling users to embark on wireless data transmission endeavors.

Intelligent Bus Servo, Powerful Power Core
The xArm-ESP32 employs intelligent serial bus servos that offer high accuracy and precise data feedback. Its wiring is simplified to reduce friction between the wires and brackets. The base servo has been upgraded to one with a torque of 25KG, enabling the robot arm to lift objects weighing up to 500g while maintaining smooth motion.

Product Structure

Dimensional Diagram

| Product Parameters | |||
|---|---|---|---|
| Size | 277*155*426mm | Body weight | about 1kg |
| Material | Full aluminum alloy body | Control system | ESP32 open-source control board |
| Power supply | 7.5V 6A DC adapter | Servo | ID1 / LX-15D / LX-225 bus servo |
| Software | PC software + iOS / Android APP | Package size | 50*30*16cm |
| DOF | 5DOF + gripper | Package weight | about 2.6kg |
| Control method | synchronization controller / APP / PS2 controller / mouse / wireless glove / computer | ||
Synchronization Controller Structure

Synchronization Controller Dimensional Diagram

| Synchronization Controller Parameters | |||
|---|---|---|---|
| Size | 163*82*295mm | Weight | 375g (without battery) |
| Material | Metal | Voltage range | 3-5V |
| Battery | Three AA dry batteries or three AA nimH rechargeable batteries | ||
| Working current | <40mA | Programming language | Arduino |
| Communication method | Bluetooth BLE | DOF | 6 joints + 1 joystick |
| Joint sensor | ALPS potentiometer | ||
| Other parameters | 2* 4PIN expansion port; 2* custom key; 1 * custom LED |
||
SPECIFICATIONS
| xArm ESP32 Bus Servo Robotic Arm | |
|---|---|
| Size | 277*155* 426mm |
| Body weight | about 1kg |
| Material | Full aluminum alloy body |
| DOF | 5DOF + gripper |
| Power supply | 7.5V 6A DC adapter |
| Control system | ESP32 open-source control board |
| Software | PC software + iOS/Android APP |
| Servo | ID1 / LX-15D / LX-225 bus servo |
| Control method | synchronization controller / APP / PS2 controller / mouse / wireless glove / computer |
| Package size | 50*30*16cm |
| Package weight | about 2.6kg |
Unassembled Robotic Arm Packing List

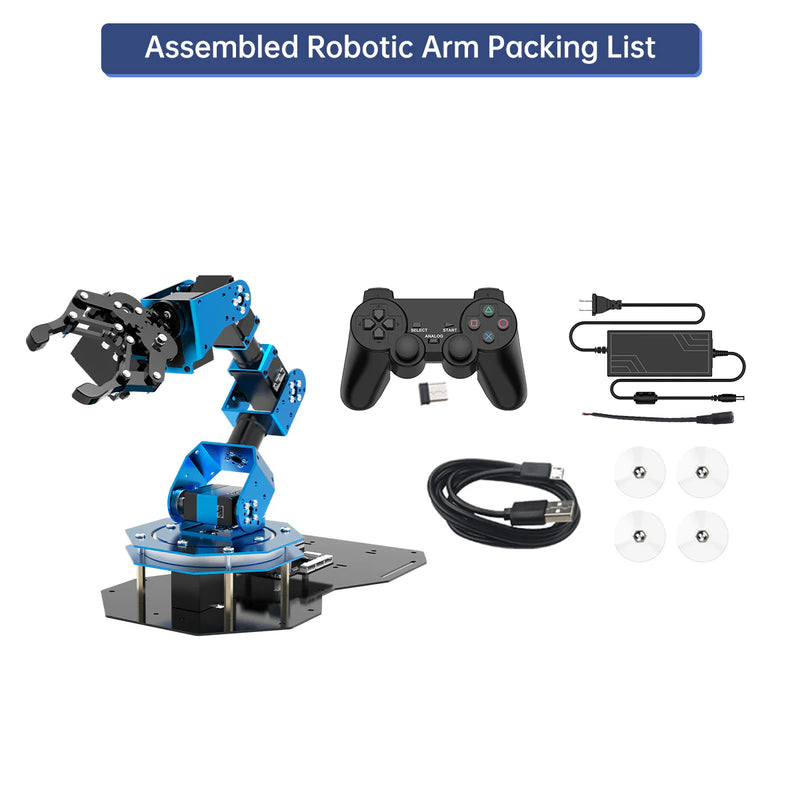
Assembled Robotic Arm Packing List

Unassembled Robotic Arm + Sensor Kit Packing List

VIDEO
Want to buy in bulk?
Custom Requirements?
Discussion Forum
Feel free to ask questions, share tips or report issues.