

JetAuto Pro is a composite ROS robot developed by Hiwonder for ROS education scenarios. It is equipped with NVIDIA Jetson or Raspberry Pi, high-performance magnetic encoding motor, and 6 DOF robotic arm. High-performance hardware configurations such as lidar, 3D depth camera, 7-inch LCD screen, and far-field microphone array can realize robot motion control, mapping navigation, path planning, tracking and obstacle avoidance, autonomous driving, 3D grabbing, navigation and handling, and somatosensory Interaction, far-field voice interaction, group control formation and other applications.
JetAuto Pro also deploys a Multimodal Large AI Model to support more advanced embodied AI applications. To help you unlock its full potential, we offer open-source code and learning resources to inspire and support your AI projects.
|

360° Omnidirectional Movement
With 4 omnidirectional mecanum wheels, JetAuto Pro can move 360° Different movement modes (move forward, horizontally, diagonally & rotate).
|

Dual-Camera Intelligent Coordination
JetAuto Pro is equipped with a 3D depth camera and a monocular camera on the robot arm, enabling the robot to perceive 3D spatial information.
|

LiDAR SLAM Mapping Navigation
JetAuto Pro is equipped with lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoldance.
|

6CH Far-field Microphone Array
The 6CH Far-field Microphone Array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.
|
Dual-Controller Design for Efficient Collaboration

Function List

Integration of Large AI Model with SLAM-Based Mapping and Navigation
JetAuto Pro combines multimodal large model to understand user voice commands via a large language model, enabling multi-point navigation. Once it arrives at the designated location, it uses a vision language model to gain a deep understanding of the surrounding objects and events. This approach greatly enhances the robot’s intelligence, adaptability, and overall user experience, making it better suited to meet real-world needs.

Large AI Model–Driven Embodied AI Applications
JetAuto Pro Advanced and Ultimate Kit are equipped with a circular 6-microphone array. Going beyond the one-way command-response pattern of traditional AI models, JetAuto Pro—powered by ChatGPT—enables a cognitive leap from semantic understanding to physical execution, significantly enhancing the naturalness and fluidity of human-machine interaction. Combined with advanced machine vision, JetAuto Pro delivers outstanding capabilities in perception, reasoning, and action, making it ideal for developing sophisticated embodied AI applications.








6CH Far-field Microphone Array
This 6-microphone array is adroit at far-field sound source localization, voice recognition and voice interaction. In comparison to ordinary microphone module, it can implement more advanced functions.



ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and

Gazebo Simulation
JetAuto Pro is built on the Robot Operating System (ROS) and integrates with Gazebo simulation. This enables effortless control of the robot in a simulated environment, facilitating algorithm prevalidation to prevent potential errors. Gazebo provides visual data, allowing you to observe the motion trajectories of each endpoint and center. This visual feedback facilitates algorithm enhancement.














|

Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences.
|

Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.
|
High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
|
Adapt to Various Scenes
The low speed of 1:90 reduction ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.
|
|
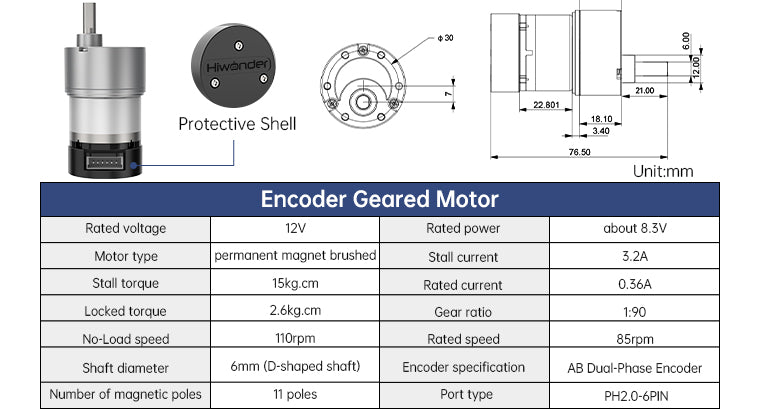
Hall Encoder Geared Motor
520 motor comes with high-accuracy encoder, and features strong force and high performance. The built-in AB phase incremental Hall encoder stands out for its high accuracy and anti-interference ability.
|
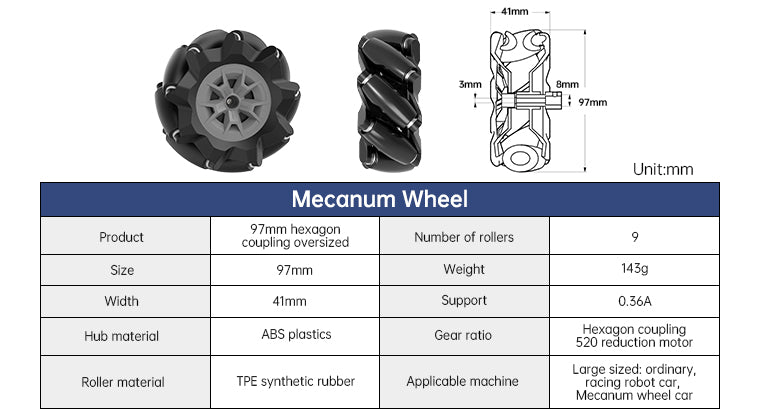
Mecanum Wheel
The mecanum wheel has a compact structure and flexible movement, supports 360° all-round movement, and realizes the full lateral movement of the car.
|


|

Multi-functional Expansion Board
The expansion board has a built-in IMU sensor which can detects robot posture in real time. There are 2-channel PWM, two keys, a LED, a buzzer, 9-channel serial bus servo interface.
|

Lithium Battery Parameters
The fuselage has a built-in 11.1V 6000mAh large-capacity lithium battery to improve the robot's endurance.
|

|

7-inch LCD Screen Parameters
|

HTS-20H Servo Parameters
|

Dimensional Diagram
|

JetAuto Pro Standard Packing List
(The Lidar model is SLAMTEC A1)

JetAuto Pro Advanced Packing List
(The Lidar model is SLAMTEC A1)

JetAuto Pro Ultimate Packing List
(The Lidar model is EAI G4)
























